一种形状记忆合金丝材的训练装置的制作方法
1.本技术涉及机械设备技术领域,尤其涉及到一种形状记忆合金丝材的训练装置。
背景技术:
2.形状记忆合金是通过热弹性与马氏体相变及其逆相变而具有形状记忆效应的、由两种以上金属元素所构成的功能材料,常被设计用于智能传感或驱动器件,在医疗器械、航天航空、机器人等领域具有非常广阔的应用前景。形状记忆合金需要经过一定的训练才能达到所需的形状记忆效应,以消除马氏体相变过程中的非均匀组织,促使形状记忆合金在工作过程中的力学行为稳定输出。现有技术中的训练方法都是在实验室进行的,然而这些训练方法只能针对长度固定且相对较短的丝材进行训练,存在难以用于产业化推广的问题。
技术实现要素:
3.本技术提供了一种形状记忆合金丝材的训练装置,用以在保证形状记忆合金丝材的机械性能的前提下,得到形态连续的、经过训练的形状记忆合金丝材,有助于实现训练方法的产业化推广。
4.第一方面,本技术提供了一种形状记忆合金丝材的训练装置,该训练装置可以包括座体、进丝组件、滑轮组件、收丝组件以及温控组件。其中,座体可包括竖直放置的安装壁;进丝组件可以包括第一卷筒,第一卷筒设置于安装壁上且可相对安装壁发生转动,第一卷筒可用于卷绕收集未经训练的形状记忆合金丝材;滑轮组件可包括动滑轮,动滑轮可位于第一卷筒的下方,由第一卷筒绕出的形状记忆合金丝材可由动滑轮的下方绕过动滑轮,从而将动滑轮支撑在形状记忆合金丝材上,在动滑轮的重力作用下,形状记忆合金丝材被拉紧;收丝组件可包括第二卷筒,第二卷筒设置于安装壁上且可相对安装壁发生转动,第二卷筒位于动滑轮的上方,可用于卷绕收集由滑轮组件绕出的形状记忆合金丝材;温控组件可用于控制第一卷筒与第二卷筒之间的形状记忆合金丝材的温度,以诱发形状记忆合金丝材相变。
5.在上述方案中,形状记忆合金丝材在动滑轮的重力作用下处于受拉状态,利用温控组件控制绕设在滑轮组件上的形状记忆合金丝材的温度,可以促使形状记忆合金丝材反复发生马氏体相变和逆相变,配合进丝组件和收丝组件对形状记忆合金丝材的连续释放和收集,就可以实现对具有连续形态的形状记忆合金丝材的训练,从而可以在保证形状记忆合金丝材的机械性能的前提下,得到形态连续的、经过训练的形状记忆合金丝材,有助于实现训练方法的产业化推广。
6.在一些可能的实施方案中,进丝组件还可以包括第一卷筒轴,第一卷筒可转动装配在第一卷筒轴上,第一卷筒轴则可固定在安装壁上,这样,当第一卷筒绕第一卷筒轴转动时,就可以将卷绕在第一卷筒上的形状记忆合金丝材向滑轮组件释放。
7.类似地,收丝组件也可以包括第二卷筒轴,第二卷筒可转动装配在第二卷筒轴上,
第二卷筒轴则可固定在安装壁上,当第二卷筒绕第二卷筒轴转动时,就可以将滑轮组件绕出的形状记忆合金丝材卷绕收集。
8.在一些可能的实施方案中,动滑轮的数量可以为一个,该动滑轮具体可位于第一卷筒与第二卷筒之间,这时,由第一卷筒绕出的丝材可由动滑轮的下方绕过动滑轮后卷绕在第二卷筒上,动滑轮可在重力作用下自动调整到第一卷筒与第二卷筒中线上的某个位置。
9.在一些可能的实施方案中,滑轮组件还可以包括定滑轮,定滑轮的数量可以为至少一个。具体设置时,至少一个定滑轮可设置于安装壁上,且可相对安装壁发生转动。定滑轮位于动滑轮的上方,至少一个定滑轮可间隔排布在第一卷筒与第二卷筒之间。这时,动滑轮的数量也可以为至少两个,具体设置时,至少两个动滑轮可分别位于第一卷筒和与第一卷筒相邻的定滑轮之间、以及第二卷筒和与第二卷筒相邻的定滑轮之间,其它动滑轮则位于任意相邻的两个定滑轮之间。
10.或者,动滑轮的数量可以为至少两个,至少两个动滑轮可分别位于任意相邻的两个定滑轮之间。再或者,其中一个动滑轮可位于第一卷筒和与第一卷筒相邻的定滑轮之间或者第二卷筒和与第二卷筒相邻的定滑轮之间,其它动滑轮可位于任意相邻的两个定滑轮之间。
11.上述方案中,沿第一卷筒指向第二卷筒的方向,从第一卷筒绕出的形状记忆合金丝材可上下交错绕过这些定滑轮和动滑轮,且形状记忆合金丝材由各个定滑轮的上方绕过定滑轮。该方案中,定滑轮及动滑轮的数量越多,形状记忆合金丝材的训练时间就越长,从而有利于增加形状记忆合金丝材的训练次数,提高对形状记忆合金丝材的训练效果。
12.在一些可能的实施方案中,至少一个定滑轮、第一卷筒及第二卷筒在安装壁上可以大致位于同一高度,这时,多个定滑轮可以大致呈等间隔设置,这种设计有利于保持形状记忆合金丝材的受力一致性,进而可以提高对形状记忆合金丝材的训练效果。
13.在将定滑轮转动装配在安装壁上时,滑轮组件还可以包括与多个定滑轮一一对应设置的多个固定轴,这些固定轴可固定设置在安装壁上,定滑轮则可转动转配在对应的固定轴上。示例性地,定滑轮与固定轴之间可以通过轴承转动连接,以减小定滑轮的转动阻力,以及提高定滑轮的转动平稳性。
14.在一些可能的实施方案中,各个动滑轮的重量可以相等,这样可以使得各个动滑轮大致处于同一高度,从而使形状记忆合金丝材在各个动滑轮处的受力相等,有利于提高对形状记忆合金丝材的训练效果。
15.在一些可能的实施方案中,定滑轮的数量与动滑轮的数量可以相等;或者,定滑轮的数量可以比动滑轮的数量多一个;或者,定滑轮的数量也可以比动滑轮的数量少一个。在这三中情况下,形状记忆合金丝材在滑轮组件中绕设时的形状大致呈锯齿形。
16.在一些可能的实施方案中,温控组件可以包括加热器和箱体,其中,箱体可用于盛装导热液体,加热器则可用于对盛装在箱体内的导热液体加热。箱体可以放置在滑轮组件的下方,这时,箱体朝向滑轮组件的一端可以为开口端,动滑轮可由箱体的开口端浸没在箱体内的导热液体中,从而使得由动滑轮下发绕过的部分形状记忆合金丝材也浸没在导热液体中,利用导热液体的温度诱发形状记忆合金丝材相变。
17.示例性地,加热器可以为加热管、电热丝,此时加热器可直接放置于箱体内的导热
液体中,通电后即可对导热液体加热。或者,加热器还可以为电磁炉或者炉灶,此时加热器可在箱体的下方对箱体及其内的导热液体加热。
18.需要说明的是,导热液体的温度与形状记忆合金丝材的相变温度有关,温度过低会影响训练效率,而温度过高则会提高训练装置的整体能耗,具体实施时,导热液体的温度可设置为af+t,其中,af为形状记忆合金丝材由马氏体转变为奥氏体的终了温度,t取值范围可在5~20k之间。
19.在一些可能的实施方案中,温控组件可以包括电源模块和连接导线,其中,电源模块可包括第一电极端和第二电极端,第一电极端可通过连接导线与形状记忆合金丝材绕设在第一卷筒的一端电性连接,第二电极端则可通过连接导线与形状记忆合金丝材绕设在第二卷筒的一端电性连接。电源模块开启向形状记忆合金丝材中通电,形状记忆合金丝材即可被加热,配合滑轮组件对形状记忆合金丝材的拉力作用,可以诱发形状记忆合金丝材产生相变。
20.具体设置时,第一卷筒与第二卷筒均可以为导电材质,形状记忆合金丝材的两端与第一卷筒及第二卷筒接触时即产生电性连接。电源模块的第一电极端及第二电极端可分别通过连接导线与第一卷筒及第二卷筒电性连接,即可以将形状记忆合金丝材连接在电源回路中。
21.在一些可能的实施方案中,电源模块输出的电流可以为脉冲电流,例如三角波形式的脉冲电流,正弦波形式的脉冲电流,或者方波形式的脉冲电流,等等。在脉冲电流的一个循环周期内,电流的强度较大时,形状记忆合金丝材的温度相对较高,这时形状记忆合金丝材可由马氏体转变为奥氏体;电流的强度较小时,形状记忆合金丝材的温度相对较低,这时形状记忆合金丝材可由奥氏体转变为马氏体。在连续的脉冲电流的作用下,丝材反复循环由马氏体-奥氏体-马氏体的转变过程,直至被收集在第二卷筒上,即完成训练,这种训练方法可以提高温控响应速度,因此训练效率相对较高。
22.在一些可能的实施方案中,收丝组件还可以包括收丝电机,收丝电机的输出轴可与第二卷筒传动连接,以第二卷筒转动,实现对训练后的形状记忆合金丝材的自动卷绕收集。
23.在一些可能的实施方案中,进丝组件还可以包括进丝电机,进丝电机的输出轴可与第一卷筒传动连接,以驱动第一卷筒转动,实现对未经训练的形状记忆合金丝材的自动释放。通过进丝电机与收丝电机的配合,可以减小形状记忆合金丝材在进丝组件侧与收丝组件侧受力不平衡的风险,从而有利于提高对形状记忆合金丝材的训练效果。
24.在一些可能的实施方案中,定滑轮的直径d可以在1~50cm范围内。动滑轮的直径d可以小于定滑轮的直径d,具体设计时,动滑轮的直径d与定滑轮的直径d满足1/10≤d/d≤1/3。
25.在一些可能的实施方案中,训练装置还可以包括位移检测模块,位移检测模块可用于在形状记忆合金丝材相变的过程中,检测动滑轮在竖直方向的位置变化,从而确定形状记忆合金丝材的长度伸缩情况,判断丝材是否达到预期的训练效果。
26.示例性地,位移监测模块可以为红外位移传感器、电位器式位移传感器、电感式位移传感器、电容式位移传感器、电涡流式位移传感器或者霍尔式位移传感器等。
27.第二方面,本技术还提供了一种形状记忆合金丝材的训练工艺,该训练工艺可应
用前述任意可能的实施方案中的训练装置实施。该训练工艺可包括:
28.将待训练的形状记忆合金丝材卷绕在第一卷筒上,并将述第一卷筒绕出的形状记忆合金丝材的一端绕过滑轮组件后固定在第二卷筒上;
29.转动第一卷筒及第二卷筒,使形状记忆合金丝材由第一卷筒向第二卷筒传动;
30.温控组件控制第一卷筒与第二卷筒之间的形状记忆合金丝材的温度,使形状记忆合金丝材在温度升高时由马氏体转变为奥氏体,以及在温度降低时由奥氏体转变为马氏体,直至形状记忆合金丝材被收集在第二卷筒上。
31.采用上述训练工艺对形状记忆合金丝材进行训练,可以促使第一卷筒与第二卷筒之间的形状记忆合金丝材反复发生马氏体相变和逆相变,配合进丝组件和收丝组件对形状记忆合金丝材的连续释放和收集,就可以实现对具有连续形态的形状记忆合金丝材的训练,从而可以在保证形状记忆合金丝材的机械性能的前提下,得到形态连续的、经过训练的形状记忆合金丝材,有助于实现训练方法的产业化推广,为工业化训练提供了合理的技术与设备思路。
附图说明
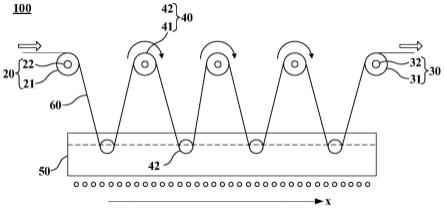
32.图1为本技术实施例提供的一种形状记忆合金丝材的训练装置的结构示意图;
33.图2为本技术实施例提供的一种形状记忆合金丝材的训练装置的侧视图;
34.图3为本技术实施例提供的另一种形状记忆合金丝材的训练装置的结构示意图;
35.图4为本技术实施例提供的另一种形状记忆合金丝材的训练装置的结构示意图;
36.图5为本技术实施例提供的另一种形状记忆合金丝材的训练装置的结构示意图;
37.图6为本技术实施例提供的又一种形状记忆合金丝材的训练装置的结构示意图。
38.附图标记:
39.100-训练装置;10-座体;20-进丝组件;30-收丝组件;40-滑轮组件;50-温控组件;
40.21-第一卷筒;31-第二卷筒;60-丝材;11-安装壁;12-底座;121-底座的第一面;
41.22-第一卷筒轴;32-第二卷筒轴;41-定滑轮;42-动滑轮;43-固定轴;51-加热器;
42.52-箱体;53-电源;54-连接导线。
具体实施方式
43.为了使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术作进一步地详细描述。
44.形状记忆合金(shape memory alloys,sma)是通过热弹性与马氏体相变及其逆相变而具有形状记忆效应的、由两种以上金属元素所构成的功能材料。所谓形状记忆效应是指发生马氏体相变的合金形变后,被加热到记忆温度以上,使低温的马氏体逆变为高温母相而恢复到形变前固有形状,或在随后的冷却过程中通过内部弹性能的释放又返回到马氏体形状的现象。也即是说,形状记忆合金能够记忆在低温马氏体相的形状,在产生了明显的塑性变形后,升高至一定的温度可以自动恢复到原来记忆的母相的形状。形状记忆合金常被设计用于智能传感或驱动器件,在医疗器械、航天航空、机器人等领域具有非常广阔的应用前景。在智能传感或驱动器件中,形状记忆合金的应用形式一般是丝材或薄膜,其中使用微米级形状记忆合金丝材作为驱动元件的应用已经较为成熟。形状记忆合金丝材的制备过
程十分复杂,通常包括熔炼、锻打、轧制、热拉拔和热处理等多道工艺,对于材料制造工艺提出了严格的要求。
45.形状记忆合金丝材的制备有一个独特的工艺过程:训练。从原理来看,训练的目的在于消除马氏体相变过程中的非均匀组织,促使形状记忆合金在工作过程中的力学行为稳定输出,提高丝材的线性度和路径的可重复性,降低相变滞后。实际的工艺过程中,训练是指形状记忆合金丝材在大应变状态下,进行往复循环处理,这一过程中往往伴随着丝材长度的永久性延伸、直径减小、相变温度升高等现象,同时微观尺度下还会出现位错增殖现象。
46.现有技术中有助于改善形状记忆合金材料的疲劳性能的训练方法都是在实验室进行的,训练过程一般为截取固定长度的形状记忆合金丝材,在力学拉伸机上进行设定应变下的加载和卸载循环,直至形状记忆合金特有的应力-应变曲线趋于稳定,则意味着训练完成。然而,这种训练方法只能针对长度固定且相对较短的丝材进行训练,存在难以用于产业化推广的问题,因为实际产业化需要的是连续不间断的应力/应变加载和卸载的循环过程,以及对应力或应变数据的演化进行及时的监控和反馈,以判断训练工艺是否达到要求,这需要研发人员对于形状记忆合金材料的训练和性能稳定化机制、微观组织演化、评估方式及装配均具有深刻的理解,目前尚未有针对形状记忆合金丝材进行的连续训练工艺和相关训练装置。
47.针对上述问题,本技术实施例提供了一种形状记忆合金丝材的训练装置,该训练装置可实现对形状记忆合金丝材的连续训练,从而在保证形状记忆合金丝材的机械性能的前提下,得到连续的、长度任意的形状记忆合金丝材,有助于实现训练方法的产业化推广。
48.首先参考图1所示,图1为本技术实施例提供的一种形状记忆合金丝材的训练装置的结构示意图。该训练装置100包可包括座体、进丝组件20、收丝组件30、滑轮组件40以及温控组件50。其中,进丝组件20、收丝组件30及滑轮组件40分别安装于座体上,进丝组件20可包括第一卷筒21,第一卷筒21可用于卷绕收纳未经训练的形状记忆合金丝材60,以下简称为丝材;收丝组件30可包括第二卷筒31,第二卷筒31可用于卷绕收纳经过训练后的丝材60。滑轮组件设置在进丝组件20和收丝组件30之间,由第一卷筒21释放的丝材60可依次绕设过滑轮组件40的各个滑轮,并受到滑轮组件40施加的拉力作用,然后被收集卷绕在第二卷筒31。这样,通过转动第一卷筒21与第二卷筒31,就可以使进丝组件20上的丝材60连续地经过滑轮组件40向收丝组件30上转移。温控组件50可用于控制绕设在滑轮组件40上的处于受拉状态的丝材60的温度,促使丝材60反复发生马氏体相变和逆相变,进而导致丝材60长度的变化,配合进丝组件20和收丝组件30对丝材60的连续释放和收集,即可实现对连续形态的丝材60的训练。
49.图2为本技术实施例提供的一种形状记忆合金丝材的训练装置的侧视图。一并参考图1和图2所示,本技术实施例中,座体10可以包括安装壁11,安装壁11可以近似为长方体结构,在实际应用中,安装壁11可以竖直放置,第一卷筒21、第二卷筒31及滑轮组件40可设置于该安装壁11上。另外,为了提高安装壁11的安放牢固性,座体10还可以包括底座12,类似地,底座12也可以近似为长方体结构,安装壁11可设置在底座12的第一面121,具体设计时,底座12在垂直于竖直方向的横截面的面积可以大于安装壁11在同方向的横截面的面积,这样可以增大底座12整体与放置平面的接触面积,从而减小训练装置100的结构稳定
性。
50.在一些实施例中,进丝组件20还可以包括第一卷筒轴22,第一卷筒21可套设在第一卷筒轴22上,且第一卷筒21可相对第一卷筒轴22转动,第一卷筒轴22则可固定在安装壁11上。第一卷筒21在绕第一卷筒轴22朝某一方向转动时,就可以将卷绕在第一卷筒21上的未经训练的丝材60释放。示例性地,若丝材60以顺时针的方向绕设在第一卷筒21上,则通过逆时针转动第一卷筒21可以将丝材60向滑轮组件上释放;相反,若丝材60以逆时针的方向绕设在第一卷筒21上,则通过顺时针转动第一卷筒21可以将丝材60向滑轮组件40上释放。
51.类似地,收丝组件30可以包括第二卷筒轴32,第二卷筒31可套设在第二卷筒轴32上,且第二卷筒31可相对第二卷筒轴32转动,第二卷筒轴32则可固定在安装壁11上。第二卷筒31在绕第二卷筒轴32转动时,就可以将经过训练后的丝材60进行卷绕收集。示例性地,第二卷筒31可以通过顺时针转动将丝材60卷绕收集,也可以通过逆时针转动将丝材60卷绕收集。
52.可以理解的,在其它一些实施例中,第一卷筒21与第一卷筒轴22之间也可以固定连接,例如第一卷筒21与第一卷筒轴22之间可以通过过盈配合相互固定,第一卷筒轴22则可以相对安装壁11发生转动,具体实施时,安装壁11上可设置第一安装孔(图中未示出),第一卷筒轴22可通过轴承与第一安装孔转动连接。此时,通过转动第一卷筒轴22可带动第一卷筒21同步转动,从而将卷绕在第一卷筒21上的未经训练的丝材60释放。类似地,第二卷筒31与第二卷筒轴32之间也可以固定连接,安装壁11上可设置第二安装孔(图中未示出),第二卷筒轴32可通过轴承与第二安装孔转动连接,通过转动第二卷筒轴32可带动第二卷筒31同步转动,从而将经过训练后的丝材60进行卷绕收集。以下实施例以第一卷筒轴22与第二卷筒轴32分别转动装配在安装壁11上为例进行说明。
53.需要说明的是,第一卷筒轴22与第二卷筒轴32的轴线方向可以相同,例如两者均可以垂直于安装壁11设置,这样可以提高丝材60在进丝组件20侧与收丝组件30侧的受力均一性,从而提高对丝材60的训练效果。
54.此外,在一些实施例中,收丝组件30还可以包括收丝电机,收丝电机的输出轴可以与第二卷筒轴32传动连接,以驱动第二卷筒轴32转动,进而带动第二卷筒31同步转动,实现对训练后的丝材60的自动卷绕收集。
55.在另外一些实施例中,进丝组件20也可以包括进丝电机,类似地,进丝电机的输出轴可以与第一卷筒轴22传动连接,以驱动第一卷筒轴22转动,进而带动第一卷筒21同步转动,实现对未经训练的丝材60的自动释放。通过进丝电机与收丝电机的配合,可以减小丝材60在进丝组件20侧与收丝组件30侧受力不平衡的风险,从而提高对丝材60的训练效果,进而提高训练后的丝材60的机械性能。考虑到训练后的丝材60会出现一定程度的预变形,即丝材60的长度在训练前后会发生变化,在相同时间段内,进丝组件20释放的丝材60长度与收丝组件30收集的丝材60长度会有一定的差异,因此,在具体实施时,可以将进丝电机与收丝电机设置为不同的转速,以使丝材60的张力在训练过程中能够保持不变,提高对丝材60的训练效果。在实际应用中,进丝电机与收丝电机的转速具体可以根据滑轮组件40的结构形式及其对丝材60施加的拉力、以及温控组件50的设定温度等参数进行设定,本技术对此不作具体限制。
56.请继续参考图1和图2所示,在本技术实施例中,滑轮组件40可以包括动滑轮42,动
滑轮42可以位于第一卷筒21及第二卷筒31的下方。动滑轮42的数量可以为一个,这时,由第一卷筒21绕出的丝材60可由动滑轮42的下方绕过动滑轮42后卷绕在第二卷筒31上。动滑轮42承载在丝材60上,在动滑轮42的重力作用下,丝材60处于受拉的状态,动滑轮42可自动调整到第一卷筒21与第二卷筒31的中线上的某个位置,从而保证丝材60的受力平衡。
57.参考图3所示,图3为本技术实施例提供的另一种形状记忆合金丝材的训练装置的结构示意图。该实施例中,滑轮组件40还可以包括定滑轮41,具体设置时,定滑轮41的数量可以为一个或多个,以多个定滑轮41为例,多个定滑轮41可以间隔设置于安装壁11上,且各个定滑轮41的轴线大致可位于同一水平线,也即各个定滑轮41的轴线与底座12的第一面121的距离大致相等。在具体实施时,多个定滑轮41可以大致呈等间隔设置,也就是说,任意相邻的两个定滑轮41之间的间距可大致相等,并且允许存在一定的差值,只要该差值在误差允许范围内即可。这种设计有利于保持丝材60的受力一致性,进而可以提高对丝材60的训练效果。定滑轮41的直径d可以在1~50cm范围内,示例性地,定滑轮41的直径d具体可以为1cm,10cm,25cm,40cm,50cm,等等。
58.在一些实施例中,滑轮组件40还可以与上述多个定滑轮41一一对应设置的多个固定轴43,这些固定轴43可固定设置在安装壁11上,定滑轮41则可套设在对应的固定轴43上,并可相对固定轴43发生转动。当丝材60绕过定滑轮41并向收丝组件30的方向传动时,定滑轮41可随同丝材60的转动而同步转动,这样可以减小丝材60与定滑轮41之间的摩擦力,进而可以减轻丝材60及定滑轮41的磨损,另外还可以减小摩擦力对丝材60受到的张力的影响。示例性地,定滑轮41与固定轴43之间可以通过轴承转动连接,这样一方面可以减小定滑轮41的转动阻力,另一方面也可以提高定滑轮41的转动平稳性,避免定滑轮41出现卡滞而导致丝材60与定滑轮41之间的摩擦力增大。
59.继续参考图3所示,当定滑轮41的数量为多个时,相应地,动滑轮42的数量也可以为多个,此时,多个动滑轮42可以位于定滑轮41的下方,也即位于定滑轮41靠近底座12的一侧。多个动滑轮42也可以等间隔设置,具体设计时,沿进丝组件20指向收丝组件30的第一方向,即图1中所示的x方向,多个动滑轮42与多个定滑轮41可以交错设置,多个动滑轮42可以分别设置于第一卷筒21和与第一卷筒21相邻的定滑轮41之间,任意相邻的两个定滑轮41之间,以及第二卷筒31和与第二卷筒31相邻的定滑轮41之间。丝材60可沿第一方向依次绕过各个动滑轮42和定滑轮41,且丝材可由定滑轮41的上方绕过定滑轮,并由动滑轮42的下方绕过动滑轮,动滑轮42承载在丝材60上,在动滑轮42的重力作用下,丝材60处于受拉的状态,此时,动滑轮42可自动调整到相邻的两个定滑轮41的中线上的某个位置,从而保证丝材60的受力平衡。或者可以说,丝材60在绕设过滑轮组件40后,多个定滑轮41与多个动滑轮42在底座12的第一面121的投影交错设置,且动滑轮42的投影与两侧的定滑轮41的投影之间的距离相等。动滑轮42与相邻的两个定滑轮41分别位于一个等腰三角形的三个顶点,且动滑轮42与左侧的定滑轮41的连线为该等腰三角形的一个腰,动滑轮42与右侧的定滑轮41的连线为该等腰三角形的另一个腰。可以看出,丝材60在滑轮组件40中绕设时的形状大致呈锯齿形。
60.由于动滑轮42承载在丝材60上,因此当各个动滑轮42的重量一致时,可以使得各个动滑轮42的轴线基本位于同一水平线上,这样可以保证丝材60在各个动滑轮42处的受力相等,从而有利于提高对丝材60的训练效果。在本技术实施例中,动滑轮42的材质与定滑轮
41的材质可以相同,另外,动滑轮42的直径可以小于定滑轮41的直径,具体设计时,动滑轮42的直径d与定滑轮41的直径d满足1/10≤d/d≤1/3。
61.可以理解的,动滑轮42的重量会直接影响丝材60受到的拉力,也即影响丝材60的训练载荷。在本技术实施例中,通过调整动滑轮42的重量或者在动滑轮42上增加配重块,将丝材60的训练载荷调整为大于诱发丝材60马氏体多变体向单变体转变的临界应力,小于丝材60产生塑性变形的应力,这样既不会影响丝材60相变,又不会造成丝材60产生不可恢复的永久变形。
62.另外需要说明的是,动滑轮42的数量与定滑轮41的数量可以相等,或者动滑轮42的数量可以比定滑轮41的数量多一个,或者定滑轮41的数量可以比定滑轮41的数量多一个。在这三种情况下,第一卷筒21与第二卷筒31的设置位置也有所不同。例如在图1所示的实施例中,动滑轮42的数量比定滑轮41的数量多一个,这时,最靠近第一卷筒21及最靠近第二卷筒31的两个滑轮均为动滑轮42,由第一卷筒21绕出的丝材60首先绕过最左侧的动滑轮42,然后沿第一方向,以动滑轮42-定滑轮41-动滑轮42的方式依次绕过各个滑轮,最后绕到最右侧的动滑轮42,由最右侧的动滑轮42绕出的丝材60则绕进第二卷筒31。由于动滑轮42的设置位置位于定滑轮41的下方,在将第一卷筒21绕出的丝材60绕过最左侧的动滑轮42时,为了使丝材60能够受到该动滑轮42的拉力作用,第一卷筒21的位置可以位于动滑轮42的上方;类似地,在将最右侧的动滑轮42绕出的丝材60绕进第二卷筒31时,为了使丝材60能够受到该动滑轮42的拉力作用,第二卷筒31的位置也位于动滑轮42的上方。示例性地,第一卷筒21与第二卷筒31的轴线与各个定滑轮41的轴线可位于同一水平线,这样可以使丝材60在各个动滑轮42处的受力保持一致,从而提高对丝材60的训练效果。
63.参考图4所示,图4为本技术实施例提供的另一种形状记忆合金丝材的训练装置的结构示意图。在该实施例中,定滑轮41的数量比动滑轮42的数量多一个,因此,最靠近第一卷筒21及最靠近第二卷筒31的两个滑轮均为定滑轮41。这时,第一卷筒21与第二卷筒31对丝材60的受力情况的影响相对较小,因此第一卷筒21与第二卷筒31仍然可以与各个定滑轮41设置在同一高度。当然,在其它一些实施例中,第一卷筒21与第二卷筒31也可以位于动滑轮42与定滑轮41之间的某一高度,或者与各个动滑轮42位于同一高度。
64.参考图5所示,图5为本技术实施例提供的另一种形状记忆合金丝材的训练装置的结构示意图。在该实施例中,定滑轮41的数量与动滑轮42的数量相等,这时,最靠近第一卷筒21及最靠近第二卷筒31的两个滑轮中,一个为动滑轮42,一个为定滑轮41。以最左侧的滑轮为动滑轮42,最右侧的滑轮为定滑轮41为例,在将第一卷筒21绕出的丝材60绕过最左侧的动滑轮42时,为了使丝材60能够受到该动滑轮42的拉力作用,第一卷筒21可以与各个定滑轮41设置在同一高度;而由于第二卷筒31对丝材60的受力情况的影响相对较小,因此第二卷筒31也可以与各个定滑轮41设置在同一高度,或者,第二卷筒31也可以位于动滑轮42与定滑轮41之间的某一高度,或者与各个动滑轮42位于同一高度。
65.需要说明的是,在实际应用中,动滑轮42及定滑轮41的数量可以根据丝材60的训练需求进行设置,图3、图4及图5中的动滑轮42以及定滑轮41的数量仅作为示意,并不对本技术构成限定。
66.请继续参考图5,在本技术实施例中,温控组件50可以采用水浴法来对丝材60的温度进行控制。具体来讲,温控组件50可以包括加热器51和用来盛装水的箱体52,箱体52的一
端为开口端,加热器51可用于对盛装在箱体52内的水进行加热。示例性地,加热器51可以为加热管、电热丝等,这时,加热器51可以直接放置于箱体52内的水中,通电后即可对水加热。或者,加热器51也可以为电磁炉、炉灶等非接触性的加热器,这时,加热器51可以设置于箱体52的下方,也即与箱体52的开口端相对的一端,通电或者通气后即可对箱体52内的水加热。当然,在其它一些实施例中,温控组件50也可以采用油浴法来对丝材60的温度进行控制,这时,只需将箱体52内的导热液体更换为豆油、棉籽油等油类即可。以下实施例具体以水浴法进行说明。
67.温控组件50可位于动滑轮42的下方,示例性地,温控组件50可设置在底座12上,此时,动滑轮42可全部浸没或部分浸没在水中,因此绕设在动滑轮42上的部分丝材60也浸没在水中,利用水浴温度即可诱发丝材60的相变。需要说明的是,动滑轮42浸没在水中的高度会影响丝材60的入水长度,因此通过调整水浴液面的高度可以控制丝材60的受热相变长度。本实施例中,水浴液面的高度可根据实际训练需求进行设计,本技术对此不做限制。另外,应当理解的是,水浴温度与丝材60的相变温度有关,温度过低会影响训练效率,而温度过高则会提高训练装置100的整体能耗。基于此,在本技术实施例中,水浴温度可设计为af+t,其中,af为丝材60由马氏体转变为奥氏体的终了温度,也即丝材60相变完成,由马氏体完全转变为奥氏体的温度,t取值范围可在5~20k之间。在该水浴温度下,丝材60的应变振幅大致在4%~8%之间。
68.在一些实施例中,训练装置100还可以包括位移检测模块(图中未示出),示例性地,该位移监测模块可以为红外位移传感器、电位器式位移传感器、电感式位移传感器、电容式位移传感器、电涡流式位移传感器或者霍尔式位移传感器等。位移监测模块可以设置在安装壁上,用于在丝材60在相变的过程中,检测动滑轮42在竖直方向的位置变化,从而确定丝材60的长度伸缩情况,判断丝材是否达到预期的训练效果。
69.下面以图5中所示的训练装置为例,说明丝材60的训练过程。首先将第一卷筒21绕出的丝材60依次绕过各个定滑轮41和动滑轮42,并将丝材60的端部固定在第二卷筒31上;然后调整动滑轮42的重量,将丝材60的训练载荷调整为设定值。可以理解的是,由于水浴会对动滑轮42产生一定的浮力,因此在设置训练载荷时需要将水浴对动滑轮42的浮力考虑进去,以提高训练精度。
70.开启进丝电机和收丝电机,使丝材60在第一卷筒21与第二卷筒31之间传动,第一卷筒21绕出的丝材60绕进在最左侧的动滑轮42之前为马氏体形态,在绕进最左侧的动滑轮42并浸入水中后受热发生相变,由马氏体转变为奥氏体,第一卷筒21与第二卷筒31之间的丝材60的长度缩短,动滑轮42的高度上升,因此丝材60的入水长度也缩短;之后由于第一卷筒21与第二卷筒31的传动作用升至水面上,这时奥氏体形态的丝材60由于出水后受低温冷却作用而逆相变为马氏体;之后绕过上方的定滑轮41后,又再次绕进下一个动滑轮42,从而再次循环由马氏体-奥氏体-马氏体的转变过程,以此类推,直至绕过最后一个动滑轮42后被收集在第二卷筒31上,即完成训练。
71.在第一卷筒21上的丝材在向第二卷筒31转移的过程中,除去靠近丝材60的两个端部的两段以外,也即训练开始阶段位于最左侧的动滑轮42与丝材60固定在第二卷筒31的端部之间的一段,以及训练结束后位于最右侧的动滑轮42与丝材60固定在第一卷筒21的端部之间的一段,丝材60上的其它任意位置都经过了上述的完整训练,因此可以得到连续且完
整的经过训练的丝材60,也即可以实现对具有连续形态的丝材60的训练,进而使得应用该训练装置100所实施的训练方法得以产业化推广。
72.可以理解的,本技术实施例中动滑轮42的数量即为丝材60的训练次数,在实际应用中,动滑轮42的数量可以根据丝材60的训练需求进行设置,图1、图3及图4中的动滑轮42以及定滑轮41的数量仅作为示意,并不对本技术构成限定。
73.示例性地,本实施例中,动滑轮42的数量可以为45个,丝材60可选用直径为25微米左右的微丝,另外通过调整动滑轮42的重量将丝材60的训练载荷设置为500mpa,然后利用上述训练方法对丝材60进行连续训练。训练完成之后,测试丝材60训练前后的相变行为。该测试具体可在动态热机械分析(dynamic thermomechanical analysis,dma)设备上进行,测试载荷为200mpa,所测项目包括丝材60由马氏体转变为奥氏体的初始温度as,马氏体转变为奥氏体的终了温度af,奥氏体转变为马氏体的初始温度ms,以及奥氏体转变为马氏体的终了温度mf。其中,马氏体转变为奥氏体的初始温度as即丝材60开始由马氏体向奥氏体转变的温度,奥氏体转变为马氏体的初始温度ms即丝材60开始由奥氏体向马氏体转变的温度,及奥氏体转变为马氏体的终了温度mf即丝材60逆相变完成,由奥氏体完全转变为马氏体的温度。具体测试结果请见表1。
74.表1
75.丝材样品ms(℃)mf(℃)as(℃)af(℃)h(a
f-ms)(℃)温度6558758419
76.根据表1的数据可知,被训练后的丝材60相变滞后温度h(a
f-ms)可降至20℃以内,因而可以证明利用本技术实施例所提供的训练装置100对丝材进行训练,对于提高丝材60的力学稳定性有显著性效果。
77.进一步利用动态热机械分析设备测试训练后的丝材60的疲劳寿命,设定载荷为400mpa,振幅为4%,频率为1hz,测试结果请见表2。
78.表2
[0079] 结构疲劳寿命(万次)衰减率(%)训练后的丝材样品205.729.3未经训练的丝材样品15.338.9
[0080]
其中,衰减率可以理解为丝材60断裂前的应变幅度与初始应变幅度之差,除以初始应变量的百分比表达。根据表2的数据可知,被训练后的丝材60的结构疲劳寿命可达到200万次以上,远大于未经训练的常规丝材60的结构疲劳寿命,且衰减率也大幅度降低。由此也可以验证本技术实施例中通过适量的训练得到的稳定马氏体能够抑制裂纹扩散,从而改善形状记忆合金丝材60的疲劳性能。
[0081]
由以上测试结果可以看出,利用本技术实施例所提供的训练装置100对丝材60进行训练,丝材60的相变滞后温度可以降至20℃以内,这对于应用形状记忆合金丝材60的驱动器件的控制精确性非常关键,在大载荷、大应变下,丝材60的工作寿命可达到百万次以上,且衰减率可以大幅度降低。因此,本技术实施例能够实现通过简洁可控的工艺手段达到连续化训练的目的,在降低形状记忆合金的相变滞后的同时,能够大幅度提高丝材60的疲劳寿命,为工业化训练提供了合理的技术与设备思路。
[0082]
参考图6所示,图6为本技术实施例提供的又一种形状记忆合金丝材的训练装置的
结构示意图。该训练装置100也可以包括座体10、进丝组件20、收丝组件30、滑轮组件40、温控组件50以及位移检测模块。其中,座体10、进丝组件20、收丝组件30、滑轮组件40及位移检测模块的结构形式及相对位置关系可参考前述实施例中的设置方式,此处不再进行赘述。所不同的是,本实施例中的温控组件50不再采用水浴法或者油浴法来控制丝材60的温度,而是通过对丝材60通电来改变丝材的温度。
[0083]
在本技术实施例中,第一卷筒21与第二卷筒31可以为导电材质,例如可以为不锈钢、铝合金或铜合金等散热性及导电性均较好的金属材料。当丝材60与第一卷筒21及第二卷筒31接触时即产生电性连接。温控组件50可包括电源模块53以及连接导线54,电源模块53的第一电极端及第二电极端可分别通过连接导线54与第一卷筒21与第二卷筒31电性连接,从而将丝材60连接在电源回路中。示例性地,第一电极端可以为电源模块53的正极,第二电极端可以为电源模块53的负极。电源模块53开启,向丝材60中通电时,丝材60就会被加热,配合滑轮组件40对丝材60施加的拉力,就可以诱发丝材60产生相变。
[0084]
具体实施时,温控组件50可以向丝材60中通入脉冲电流,在脉冲电流的一个循环周期内,不同时段电流的大小有所不同,当电流较大时,丝材60的温度也相对较高,当电流较小时,丝材60的温度则相对较低。基于此,可以根据丝材60的相变温度对脉冲电流的大小进行设计,假设与丝材60由马氏体转变为奥氏体的初始温度as相对应的电流为第一电流阈值,与丝材60由奥氏体转变为马氏体的初始温度ms相对应的电流为第二电流阈值,则在脉冲电流的一个循环周期内,至少存在电流值大于或等于第一电流阈值的第一时间段,以及电流值小于或等于第二电流阈值的第二时间段,进而使得丝材60可以在第一时间段内由马氏体转变为奥氏体,以及在第二时间段内由奥氏体转变为马氏体。在连续的脉冲电流的作用下,丝材60反复循环由马氏体-奥氏体-马氏体的转变过程,直至被收集在第二卷筒31上,即完成训练。另外本技术实施例中可以通过设置合理的脉冲电流强度,使丝材60的应变振幅大致在4%~8%之间。示例性地,本技术实施例中的脉冲电流可以为三角波形式的脉冲电流,正弦波形式的脉冲电流,或者方波形式的脉冲电流,等等。
[0085]
下面具体说明利用图5中的训练装置100对丝材进行训练的过程。本实施例中,丝材60可选用直径为30微米左右的微丝,将第一卷筒21绕出的丝材60依次绕过各个定滑轮41和动滑轮42,并将丝材60的端部固定在第二卷筒31上;然后调整动滑轮42的重量,将丝材60的训练载荷调整为设定值。示例性地,训练载荷可以设置为450mpa。
[0086]
开启进丝电机和收丝电机,使丝材60在第一卷筒21与第二卷筒31之间传动,同时控制温控组件向丝材60中通入脉冲电流。当脉冲电流的电流值小于第一电流阈值时,丝材60表现为马氏体状态;当脉冲电流的电流值超过第一电流阈值时,绕设在滑轮组件40的丝材开始由马氏体向奥氏体转变,第一卷筒21与第二卷筒31之间的丝材60的长度缩短,动滑轮42的高度上升;当脉冲电流的电流值降低至第二电流阈值以下时,绕设在滑轮组件40的丝材60则开始由奥氏体向马氏体转变。随着脉冲电流的不断循环,第一卷筒21与第二卷筒31之间的丝材也不断以马氏体-奥氏体-马氏体的过程循环转变。在本实施例中,丝材60的训练时长即为丝材60在第一卷筒21与第二卷筒31之间的传动时间,该传动时间与动滑轮42及定滑轮41的数量有关,动滑轮42及定滑轮41的数量越多,丝材的训练时间也越长,脉冲电流的循环周期也可以相应增加,进而可以增加丝材60的训练次数。实验表明,在450mpa的训练载荷下,实现合格训练的训练次数约为80次。
[0087]
在第一卷筒21上的丝材60在向第二卷筒31转移的过程中,丝材60的任意一段都可以经过上述的完整训练,因此可以得到连续且完整的经过训练的丝材60,也即可以实现对具有连续形态的丝材60的训练,进而使得应用该训练装置100所实施的训练方法得以产业化推广。另外,本实施例利用电脉冲对丝材60的温度进行控制,还可以提高温控响应速度,因此训练效率也相对较高。
[0088]
另外,经测试表明,利用图5中所示的训练装置100训练后的丝材60可达到与前述实施例基本一致的效果,因此可以实现通过简洁可控的工艺手段达到连续化训练的目的,在降低形状记忆合金的相变滞后的同时,能够大幅度提高丝材60的疲劳寿命,为工业化训练提供了合理的技术与设备思路。
[0089]
以上,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1