真空隔离的批处理系统的制作方法
真空隔离的批处理系统
1.本技术是申请日为2019年9月12日、申请号为2019108670521.1、名称为“真空隔离的批处理系统”的分案申请。
技术领域
2.本发明涉及半导体器件制造方法和系统。
背景技术:
3.通过物理气相沉积(pvd)的溅射在半导体行业中广泛用于在半导体晶片上沉积薄金属膜。这些膜通常由ti、cu、al、au、ta等组成。在准备薄膜沉积时,通常要进行溅射蚀刻清洁。在清洁表面之后,可以使用若干类型的气相沉积技术之一。在薄膜沉积之后,可以继续进行其他制造和/或封装步骤。
4.在半导体衬底上沉积金属薄膜的常用方法是使用多个单晶片处理腔室,其中每个腔室一次只能沉积一种材料。然而,将单独的单晶片处理腔室专用于单个工艺增加了这种系统的成本并且还需要中间机器人晶片处理,限制了系统吞吐量。
5.批处理系统的优点是可以在单个大真空腔室中同时处理若干晶片。单腔室批处理系统的尺寸通常被设定成每个腔室容纳约3至6个晶片。然后使用pvd技术同时涂覆所有晶片。这种批处理系统的一个限制是,公共真空腔室内的多个处理位置无法相互真空隔离。这意味着维修包含相应处理位置的一个处理模块需要给所有处理模块通气。
6.通常,在恢复生产之前,给处理腔室通气需要重新验证,降低了系统可用性。对于一些处理腔室,给腔室通气会产生额外的维修。例如,如果给腔室通气,通常必须清洁使用tiw作为靶材的pvd腔室的屏蔽件,以防止产生颗粒。
7.其他批处理系统可以提供各个处理模块的真空隔离。然而,这种单独的真空隔离需要昂贵的泵送装置。
技术实现要素:
8.如本发明所述,理想的解决方案提供了批处理系统的吞吐量,所述批处理系统具有单独真空隔离系统的优点,而且针对每个单独腔室并没有复杂且昂贵的真空设备。本发明中的技术提供了批处理系统,所述批处理系统针对多个处理腔室的处理使用公共真空腔室泵送,而不是每个腔室都有自己的真空泵送系统。因此,单个真空泵或真空泵装置可以用于批处理系统。可以通气维修一些处理模块,同时保持其他处理模块处于真空状态。此外,在同时拆卸一个或多个处理模块进行维修时,可以在系统内在真空状态下继续对半导体衬底进行气相沉积处理。
9.一个实施例包括具有若干部件的气相淀积系统。真空腔室被配置成保持气体压力小于大气压力。真空腔室的尺寸被设定成允许在真空腔室内运送两个或更多个半导体衬底。两个或更多个处理模块各自被配置成处理半导体衬底。每个处理模块可移除地连接至真空腔室的相应端口,使得当连接到相应端口时,每个处理模块与真空腔室真空连通。当连
接到相应端口时,每个处理模块被配置成保持气体压力小于大气压力。端口密封机构被配置成在每个端口处形成真空密封,使得当第一端口被密封并且对应于第一端口的第一处理模块与第一端口断开连接时,在第一处理模块通向大气压力的同时在真空腔室内保持真空状态。
10.另一个实施例包括具有若干部件的气相淀积系统。这些部件包括具有多个处理模块的主真空腔室以及能够在所述主真空腔室内移动的阀板。其他部件包括用于将阀板从备用位置移动到密封位置的载体,所述备用位置允许在处理模块中对多晶片进行处理,所述密封位置将处理模块与主真空腔室隔离。沉积系统还包括锁环,所述锁环用于将阀板o形环压紧到处理模块的密封表面上,提供足够的o形环压紧以保持阀板上方的大气状态和阀板下方的高真空状态。
11.当然,为清晰起见,已经阐述了本发明中描述的不同步骤的讨论顺序。通常,可以以任何适当顺序执行这些步骤。此外,尽管本发明中的每个不同特征、技术、配置等可以在本公开的不同位置讨论,但意图是每种构思可以彼此独立地执行或者彼此组合执行。因此,可以以许多不同方式来实施和看待本发明。
12.应注意的是,此发明内容部分未指定本公开或要求保护的发明的每个实施例和/或递增的新颖方面。此发明内容相对于常规技术仅提供了对不同实施例和新颖性的对应点的初步讨论。对于本发明和实施例的其他细节和/或可能视角,读者可以参阅本发明的具体实施方式部分和对应的附图(如下文进一步讨论的)。
附图说明
13.当结合附图参考详细说明时,可以更好地理解本发明。
14.图1示意性地示出了pvd系统的俯视图。
15.图2a和2b示意性地示出了批处理腔室的透视图,其中一些部件在图2b中是透明的。
16.图3示意性地示出了操作期间的处理模块的放大截面透视图。
17.图4a示意性示出了处于维修模式的图3的处理模块的放大截面透视图,其中为了清楚起见,省略了真空腔室。
18.图4b与图4a类似,但包括真空腔室。
19.图5a示意性示出了多模块腔室的放大截面透视图。
20.图5b示意性地示出了操作期间的图2a和图2b的批处理腔室的透视图。
21.图6a示意性示出了多模块腔室的放大截面透视图。
22.图6b示意性示出了多模块腔室内的对准构件的放大透视图。
23.图7a示意性示出了多模块腔室的放大截面透视图。
24.图7b示意性示出了多模块腔室内的对准构件的放大透视图。
25.图8示意性示出了多模块腔室的放大截面透视图。
26.图9a示意性示出了处理模块的放大截面透视图。
27.图9b示意性示出了图9a的处理模块的截面图。
28.图10a示意性示出了沉积阀板的部分透视图。
29.图10b示意性示出了图10a的沉积阀板的放大仰视透视图。
30.图11a示意性地示出了锁环。
31.图11b示意性示出了图11a的锁环的透视图。
32.图12a示意性地示出了图11a的旋转后的锁环。
33.图12b示意性地示出了图12a的锁环的截面图。
34.图13a示意性地示出了图12a的进一步旋转后的锁环。
35.图13b示意性地示出了图13a的锁环的截面图。
36.图14示意性地示出了处于打开位置的处理模块的透视图。
具体实施方式
37.现在将更详细地描述示例气相沉积系统。图1示出了pvd系统200。所述pvd系统200包括具有一个传送位置的批处理腔室220和五个处理模块。系统200被配置成通过将所有晶片同时从一个位置移动到下一个位置来同时处理五个衬底。应注意的是,其他系统可以有更多或更少的位置。五个处理位置在两个蚀刻处理模块230a和230b以及三个沉积处理模块240a、240b和240c内居中。应注意的是,图1中所示的部件201、202、203、204、205、206、207和208在本领域中以各种形式已知,因此对本领域技术人员而言是显而易见的,而图1中所示的部件209、211、220、230和240与本发明相关联。此外,虽然从以下描述中显而易见的是,本设备的各个部件在操作中是可移动的且能被驱动,但是为了清楚起见,省略了用于实现这种驱动的装置。为避免疑虑,这些部件的致动可以以多种方式实现,例如通过连接合适的电操作电动机或致动器,所述电动机或致动器由操作者或更常见地由控制装置(未示出)(如合适的编程计算机或处理器)控制。
38.如本领域中众所周知的,在操作期间,前开式晶圆传送盒(foup)201内的衬底210由前端203处的机器人204运送到批量排气模块202。衬底210可以由半导体材料组成或可以为复合晶片,如用于扇出晶圆级封装。衬底可以是圆形或者矩形。在排气处理之后,机器人204将衬底210运送到负载锁定部205进行抽空降压。在抽空降压之后,如本领域中众所周知的,真空机器人207将衬底210传送到真空传送模块206中的冷却卡盘208。一旦冷却,机器人207就通过闸阀209移动衬底210并将衬底放置在载体211上。载体圆盘225(参见例如图2b)顺时针旋转,从而将载体211和衬底放入处理模块230a中进行溅射蚀刻预清洁。在处理模块230a中处理衬底210的同时,将其他衬底210放置在附接至载体圆盘225的下一个载体211上。
39.相应载体211上有衬底210等的载体圆盘225继续旋转穿过其他处理模块,从而按顺序执行每个工序。处理模块可以包括第二溅射蚀刻预清洁模块230b、第一pvd溅射沉积模块240a、第二pvd溅射沉积模块240b和第三pvd溅射沉积模块240c。各个沉积模块可以用于沉积相同或不同金属。如所能理解的,可以使用各个沉积组合。载体211再次被旋转直到衬底位于闸阀209处的传送位置。机器人207将衬底210传送至负载锁定部205。在通气后,机器人204将经处理的衬底返回foup 201。
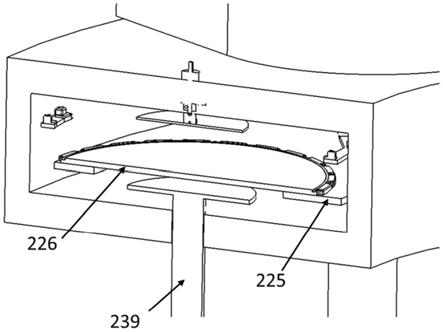
40.图2a展示了批处理腔室220的细节。这些细节包括一个主真空腔室212以及围绕主真空腔室212排列的处理模块230a、230b、240a、240b和240c。图2b示出了批处理腔室220,其中主真空腔室212被隐藏以便显示内部细节。具有用于传送衬底210的多个位置的传送圆盘或多模块载体圆盘225能够在主真空腔室212内旋转。示出了位于备用位置且由备用支撑连
杆227夹持的阀板226。晶片或衬底210在无处理腔室的位置通过真空腔室212的侧面上的狭槽213插入该腔室212中。此动作借助于真空机器人207实现并且主真空腔室212的此侧面附接到真空传送模块206。
41.图3示出了操作期间的处理模块230,其中处理卡盘229在处理期间支撑衬底210。对多模块载体圆盘225进行旋转定位,使得处理卡盘229可以通过多模块载体圆盘225的开口竖直移动。使用备用连杆227将阀板226定位在升降基座239和多模块载体圆盘225竖直上方的平面中。连杆227中的对准构件237确保阀板226相对于基座239居中。锁环228位于阀板226与处理模块230的底座231之间的垂直平面中。
42.图4a示出了处于维修模式的处理模块230,在维修模式,可以接近处理模块230。如所示出的,模块230枢转打开约180度,从而可以接近处理模块230的底座231和内表面。枢轴线被设置成大致与真空腔室212的圆形边缘相切。这种接近允许预防性维修操作,如更换可能在处理期间积聚碎屑的各种屏蔽元件。图4b示出了阀板226,阀板226抵靠在主真空腔室212的通常为圆形的内密封表面232上而保持就位,压紧位于密封表面232附近的o形环233以提供密封,使得主腔室212可以在维修操作期间保持高真空状态。
43.现在将描述阀板示例操作。为了启动阀板226,从图3所示的正常操作模式移动到图4a及图4b中的维修模式,可以执行几个步骤。在图5a和5b中,使用多模块载体圆盘225的旋转运动从多模块腔室212移除衬底210。多模块载体圆盘225然后旋转直到开口直接位于阀板升降基座239上方和处于备用位置的阀板226下方。
44.在待维修的模块中的每个模块中,阀板升降基座239向上移动,将阀板226从支撑连杆227上抬起并使对准构件237对中。这在图6a和6b中示出了。
45.驱动支撑连杆227摆离阀板226。阀板226现在支撑在升降基座239上,如图7a和7b所示。
46.现在参照图8,阀板基座239向下移动,从而将阀板226放在在多模块载体圆盘225上。基座239继续向下移动到多模块载体圆盘225下方,使得多模块载体圆盘225可自由旋转。
47.如图9a和图9b中所示出的,包含一个或多个阀板226的多模块载体圆盘225旋转,将每个阀板226定位在其相应处理模块230的下方。
48.如图10a和图10b所示出的,处理卡盘229向上移动,带动阀板226与密封表面232接触。阀板226具有外围间隙243,这些外围间隙允许阀板移动经过设置在锁环228中的辊244(参见图11a及图11b),该锁环用作滚子轴承。虽然示出的是使用滚子轴承,但本领域的技术人员将理解的是,其他轴承(例如滑动轴承或滚珠轴承)也可以用于或替代地用于在阀板226与锁环228之间提供低摩擦引导运动。阀板226还具有螺旋倾斜表面242,螺旋倾斜表面242被配置成将方位运动转换成杠杆轴向力,足以压紧o形环233并抵抗大气力,该大气力在将处理模块230通气到大气压力时抵抗轴向力。
49.图11a和11b展示了使用倾斜表面242旋转至接合辊244的锁环228。
50.当辊244沿着阀板倾斜表面242行进时,锁环228继续旋转,从而竖直移动阀板226以压紧o形环233抵靠在密封表面232上。围绕锁环228的周边的锁环支撑件246上的滚珠轴承座圈245支撑该运动的垂直和径向负荷。图12a和12b中展示了示例结果。
51.现在参照图13a和13b,锁环228可以旋转到最终位置,充分压紧o形环233并且移出
阀板倾斜表面242,避免大气压力促使锁环228向后旋转。
52.一个或多个处理模块230可以通气到大气压力并且枢转打开到维修位置。图14展示了枢转到打开位置的所有处理模块230。
53.因此,单泵装置可以用于在真空腔室和处理模块中形成真空条件,同时实现对每个处理模块的独立维修接触。应注意的是,本发明中的真空或真空条件不限于绝对真空,但是预期压力小于大气压力。
54.一个实施例包括具有若干部件的气相淀积系统。真空腔室被配置成保持气体压力小于大气压力。真空腔室的尺寸被设定成允许在真空腔室内运送两个或更多个半导体衬底。这可以包括分开传送,因为衬底被传送至不同处理工位。两个或更多个处理模块被配置成处理半导体衬底。每个处理模块可移除地连接至真空腔室的相应端口(开口),使得当连接到相应端口时,每个处理模块与真空腔室真空连通。当连接到相应端口时,每个处理模块被配置成保持气体压力低于大气压力。换句话说,处理模块可以连接到真空腔室,形成真空密封,从而可以通过真空腔室和连接的处理模块保持真空。
55.真空腔室包含端口密封机构,所述端口密封机构被配置成在每个端口处形成真空密封,使得当第一端口被密封并且对应于第一端口的第一处理模块与第一端口断开连接时,在第一处理模块通向大气压力的同时在真空腔室内保持真空状态。换句话说,处理模块连接的真空腔室中的开口可以被关闭或密封以分离各个处理模块,同时仍然保持真空腔室和其他连接的处理模块内的真空状态。相应地,位于真空腔室或其他连接的处理模块内的衬底保持在真空状态。
56.在其他实施例中,系统包括至少两个溅射蚀刻清洁处理模块和至少两个气相沉积处理模块。因此,如果需要接近给定处理模块以进行维修,则可以使用剩余连接的处理模块继续对晶片进行处理。处理模块可以枢转地连接至真空腔室或气相淀积系统并且可以枢转或旋转远离真空腔室以便接近屏蔽件,从而更换或清洁表面。在此清洁期间,可以使用仍然附接到真空腔室的剩余处理模块继续进行晶片处理。此外,在维修未附接的处理模块的同时,每个附接的处理模块可以处理晶片。因此,在一个或多个处理模块接收维修时,可以继续进行晶片处理操作。这减少了对吞吐量的任何影响,与此同时,为系统提供了更少的真空泵或单个真空泵。
57.如上所述,衬底载体可以用于在真空腔室内运送半导体衬底。该真空腔室可以是具有如所述的圆形通道的环形形状、或可以是线性形状、矩形形状等。
58.阀板可以用于密封真空腔室的端口(开口)。可以实施其他密封件。可以使用阀板实施锁环来将阀板牢固地附接到端口,以保持真空腔室内的真空状态。
59.在前面的描述中已经阐述了具体细节,如处理系统的特定几何结构以及对其内使用的各种部件和工艺的描述。然而,应当理解的是,本发明中的技术可以在脱离这些具体细节的其他实施例中实施,并且这些细节是出于解释而非限制的目的。已经参照附图对本文中公开的实施例进行了描述。同样地,出于解释的目的,给出了具体数字、材料和构型以便提供透彻理解。尽管如此,也可以在没有这些具体细节的情况下实践实施例。用相同的附图标记表示具有基本相同功能结构的部件,因此可以省略任何多余的描述。
60.已经将各个技术描述为多个离散操作以帮助理解各个实施例。描述顺序不应被解释为暗示这些操作必须依赖于顺序。事实上,这些操作不必按呈现顺序进行。可以按与所描
述的实施例不同的顺序来执行所描述的操作。可以执行各种附加的操作和/或可以在附加实施例中省略所描述的操作。
61.本发明中所使用的“衬底”或“目标衬底”一般是指根据本发明处理的对象。衬底可以包括器件的任何材料部分或结构,特别是半导体或其他电子器件,并且可以是例如基础衬底结构(如半导体晶片、掩模版或在基础衬底结构上或覆盖基础衬底结构的层(如薄膜)。因此,衬底不限于任何特定的图案化或未图案化的基础结构、底层或覆盖层、而是预期包括任何这样的层和/或基础结构、及其任何组合。该描述可以参考特定类型的衬底,但这仅出于说明的目的。
62.本领域技术人员还将理解的是,在仍实现本发明的相同目的的情况下,可以对上述技术的操作进行许多变更。这些变更皆包含在本公开的范围内。因此,本发明的实施例的前述描述不旨在是限制性的。更确切地说,在以下权利要求书中阐述了对本发明的实施例的任何限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1