一种专用叶片砂带抛磨机器人
1.本发明属于叶片专用砂带抛磨技术领域,涉及一种专用叶片砂带抛磨机器人。
背景技术:
2.近年来工业机器人凭借高度柔性、成本低、操作简便的优点,广泛应用于叶片抛磨领域。砂带磨削具有弹性加工特性,对于叶片这种弱刚性的复杂型面轮廓的光顺过渡具有很好的拟合效果,因此广泛应用于叶片等复杂曲面轮廓的零件磨削加工阶段。传统的机器人砂带抛磨系统采用6自由度工业机器人与固定的砂带磨削机构结合,工业机器人手持待加工叶片,通过位姿的调整实现叶片的加工。机器人叶片砂带抛磨方式仍属于新兴领域,机器人叶片磨削加工技术是在已有的磨削技术上发展的,更多的是针对机器人与叶片二者作为结合体所具有的特点来研究,比如弱刚性和相对于机床的低的运动精度。
技术实现要素:
3.本发明的目的是提供一种专用叶片砂带抛磨机器人,解决了由于传统工业机器人刚性弱和运动精度低,导致的叶片加工精度难以保证的问题。
4.本发明所采用的技术方案是,一种专用叶片砂带抛磨机器人,包括四自由度叶片夹持机构,四自由度叶片夹持机构上设有叶片夹具,叶片夹具上装夹有叶片;
5.还包括二自由度砂带磨削机构,二自由度砂带磨削机构对叶片夹具上的叶片进行磨削。
6.本发明的特点还在于:
7.四自由度叶片夹持机构包括立柱,立柱的内侧沿竖直方向设有丝杠,丝杠的顶部设有伺服电机,丝杠位于立柱的中心处,丝杠的相对两侧分别沿竖直方向设有导轨,两个导轨分别与两个滑块配合,两个滑块分别位于大臂一侧的相对两端,大臂的内侧中部还连接有丝杠螺母,丝杠螺母与丝杠配合;
8.大臂的另一侧设有肩关节伺服电机;肩关节伺服电机的输出端连接手肘臂的一端;手肘臂的另一端设有肘关节伺服电机,肘关节伺服电机连接手腕臂,手腕臂上安装有力矩电机,力矩电机上安装有叶片夹具。
9.伺服电机通过法兰与手肘臂连接,伺服电机输出轴与谐波减速器连接,谐波减速器的输出轴与手腕臂通过腕臂键连接。
10.二自由度砂带磨削机构包括三相异步电机,三相异步电机安装在基座上,三相异步电机的输出轴通过联轴器连接轴的一端,轴的另一端通过键i连接有锥齿轮i,锥齿轮i与锥齿轮ii啮合,锥齿轮ii通过键ii连接在锥齿轮轴的一端;锥齿轮轴的另一端的轴端锥齿轮与锥齿轮iii啮合,锥齿轮iii通过键iii连接在轴a上,锥齿轮iii通过键iii将运动传递给轴a,轴a通过键a与齿形同步带轮a连接;齿形同步带轮a通过齿形带连接齿形同步带轮b,齿形同步带轮b通过键c连接在轴b41,轴b通过键d连接驱动轮,驱动轮上设有砂带。
11.轴上还同轴安装有锥齿轮b,锥齿轮b与锥齿轮a啮合,锥齿轮a通过键f安装在轴c
上,轴c通过联轴器a与伺服电机b连接;伺服电机b通过法兰b与外壳c固定连接;锥齿轮b通过螺钉与谐波减速器波发生器a连接,谐波减速器钢轮a与壳体c连接,谐波减速器输出柔轮a与壳体a连接,轴的一端伸入壳体a内。
12.壳体a通过法兰c与伺服电机连接,伺服电机a输出轴通过键e与锥齿轮c连接,锥齿轮c与锥齿轮d啮合,锥齿轮d与谐波减速器波发生器b连接,谐波减速器钢轮b与壳体a固定连接,谐波减速器输出柔轮b与壳体固定连接。
13.本发明的有益效果如下:
14.1.在2自由度机械臂内部传动设计中,为降低机械臂整体的转动惯量,减轻整体质量,将驱动砂带转动的三相异步电动机固定于立柱上,不随机械臂的运动而发生位置改变,以达到更好的加工效果,因此在其他动力元件和传动元件的布置上与传统机械臂有所差异。
15.2.基座采用梁类零件设计,以满足滚珠丝杠的安装和运动;截面形状为挖槽矩形,具有较好的抗弯和抗扭刚度;高度方向上布置肋条,并将基座分隔成多个细胞单元以提高刚度,降低质量,提高工艺性,在薄壁上布置肋条可以减少局部变形和薄壁振动,提高局部刚度。
附图说明
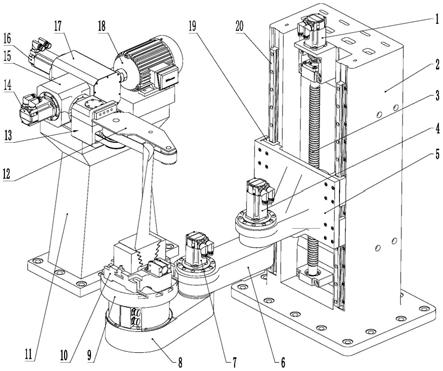
16.图1为本发明一种专用叶片砂带抛磨机器人的结构示意图;
17.图2为本发明一种专用叶片砂带抛磨机器人的4自由度叶片夹持机器人肘关节结构示意图;
18.图3为本发明一种专用叶片砂带抛磨机器人的磨削机构驱动电机端传动示意图;
19.图4为本发明一种专用叶片砂带抛磨机器人的磨削机构驱动轮端传动示意图;
20.图5为本发明一种专用叶片砂带抛磨机器人的砂带磨削机构回转自由度1结构示意图;
21.图6为本发明一种专用叶片砂带抛磨机器人的砂带磨削机构回转自由度2结构示意图。
22.图中,1-伺服电机,2-立柱,3-丝杠,4-肩关节伺服电机,5-大臂,6-手肘臂,7.肘关节伺服电机,8-手腕臂,9-力矩电机,10-叶片夹具,11-基座,12-磨削机构背板,13-壳体,14-伺服电机a,15-壳体a,16-伺服电机b,17-壳体c,18-三相异步电机,19-滑块,20-导轨,21-谐波减速器,22-法兰a,23-腕臂键,24-输出轴,25-联轴器,26-轴,27-键i,28-锥齿轮i,29-键ii,30-锥齿轮ii,31-锥齿轮轴,32-锥齿轮iii,33-键iii,34-齿形同步轮a,35-齿形带,36-键a,37-轴a,38-砂带,39-齿形同步轮b,40-键c,41-轴b,42-键d,43-驱动轮,44-联轴器a,45-轴c,46-键f,47-锥齿轮a,48-谐波减速器钢轮a,49-锥齿轮b,50-谐波减速器波发生器a,51-谐波减速器输出柔轮a,52-法兰b,53-法兰c,54-键e,55-锥齿轮c,56-锥齿轮d,57-谐波减速器波发生器b,58-谐波减速器钢轮b,59-谐波减速器输出柔轮b。
具体实施方式
23.下面结合附图和具体实施方式对本发明进行详细说明。
24.本发明一种专用叶片砂带抛磨机器人,除具有上位机模块外,如图1所示,还包括
四自由度叶片夹持机械臂和二自由度砂带磨削机构。
25.四自由度叶片夹持机械臂由立柱、大臂关节、肘关节、腕关节和叶片专用夹具组成,形成了沿z轴往复运动和绕z轴回转的三个自由度。
26.立柱2固定在地面上,立柱2的内侧沿竖直方向设有丝杠3,丝杠3的顶部设有伺服电机1,丝杠3位于立柱2的中心处,丝杠3的相对两侧分别沿竖直方向设有导轨20,两个导轨20分别与两个滑块19配合,两个滑块19分别位于大臂5一侧的相对两端,大臂5的内侧中部还连接有丝杠螺母,丝杠螺母与丝杠3配合;
27.大臂5的另一侧设有肩关节伺服电机4;肩关节伺服电机4的输出端连接手肘臂6的一端;手肘臂6的另一端设有肘关节伺服电机7。
28.伺服电机1驱动丝杠3回转,丝杠螺母与大臂5固定连接,大臂5随着丝杠3的回转运动在导轨20和滑块19的导向作用下实现上下往复运动。
29.大臂关节和肘关节的传动方式相同,以肘关节为例进行说明。
30.如图2所示,肘关节伺服电机7通过法兰a22与手肘臂6固定连接,肘关节伺服电机7的输出轴与谐波减速器21连接,谐波减速器21的输出轴24与手腕臂8通过腕臂键23连接,进行回转运动的传递。
31.力矩电机9固定安装在手腕臂8上,叶片夹具10固定安装在力矩电机9的回转台面上,叶片由叶片夹具10进行定位和夹紧。
32.二自由度砂带磨削机构包括三相异步电机18,三相异步电机18固定安装在基座11上,如图3所示,三相异步电机18的输出轴通过联轴器25连接轴26的一端,轴26的另一端通过键i27连接有锥齿轮i28,三相异步电机18的回转运动通过轴26上的键i27直接传递给锥齿轮i28,锥齿轮i28与锥齿轮ii30啮合进行回转运动的传递,锥齿轮ii30通过键ii29连接在锥齿轮轴31的一端,锥齿轮ii30通过键ii29将回转运动传递给锥齿轮轴31。
33.如图4所示,锥齿轮轴31的另一端轴端锥齿轮与锥齿轮iii32啮合进行回转运动传递,锥齿轮iii32通过键iii33连接在轴a37上,锥齿轮iii32通过键iii33将运动传递给轴a37,轴a37通过键a36与齿形同步带轮a34连接,轴a37上的键a36与齿形同步带轮a34连接进行运动传递;
34.齿形同步带轮a34通过齿形带35将运动传递给齿形同步带轮b39,齿形同步带轮b39与键c40配合连接将运动传递给轴b41,轴b41上的键d42将回转运动传递给驱动轮43,最后驱动轮43驱动砂带38进行磨削加工。
35.轴a37安装在壳体13内,壳体13与磨削机构背板12连接,轴b41连接在磨削机构背板12上。
36.如图5、6所示,伺服电机b16通过法兰b52与外壳c17固定连接,伺服电机b16的输出轴通过联轴器a44将回转运动传递给轴c45,轴c45上的键f46将回转运动传递给锥齿轮a47,锥齿轮a47与锥齿轮b49啮合进行回转运动的传递,锥齿轮b49通过螺钉与谐波减速器波发生器a50固定连接进行运动的传递,谐波减速器钢轮a48与壳体c17固定连接,谐波减速器输出柔轮a51与壳体a15连接,谐波减速器输出柔轮a51的回转运动使壳体a15绕轴26进行回转运动。
37.壳体a15的回转运动可以传递给壳体13,壳体13与磨削机构背板12通过螺钉固定连接,从而实现磨削机构绕轴26的摆动。
38.伺服电机a14通过法兰c53与壳体a15固定连接,伺服电机a14输出轴上的键e54将伺服电机a14的回转运动传递给锥齿轮c55,锥齿轮c55与锥齿轮d56啮合进行回转运动的传递,锥齿轮d56与谐波减速器波发生器b57固定连接,谐波减速器钢轮b58与壳体a15固定连接,谐波减速器输出柔轮b59与壳体13固定连接,实现壳体13绕锥齿轮轴31的回转运动,壳体13与磨削机构背板12通过螺钉固定连接,从而实现砂带磨削机构绕锥齿轮轴31的摆动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1