一种用于金属掩膜版磁铁板上的磁条装卸装置的制作方法
1.本发明属于蒸镀设备技术领域,尤其是涉及一种用于金属掩膜版磁铁板上的磁条装卸装置。
背景技术:
2.oled(organic light-emitting diode,有机发光二极管)作为自发光的显示器件,为提高显示的色域、对比度及亮度等显示特性,一般会采用独立的颜色发光层(比如,rgb发光层)实现彩色显示。在蒸镀独立的颜色发光层时需要使用到掩膜版,在蒸镀过程中,由于重力作用会出现下垂影响蒸镀良率,一般会再玻璃基板上方使用磁铁板将金属掩膜版吸附住,使得金属掩膜版在蒸镀过程中尽量贴合玻璃基板,提高蒸镀良率。
3.磁铁板上的磁条十分密集,而且磁力非常大,一旦出现某些问题需要拆掉部分磁条,则需要将周围磁条全部拆掉方可取下,十分不便,现在一般都是依靠人工手动装卸永磁铁,存在夹伤、挤伤人员手指的安全风险。
技术实现要素:
4.本发明的目的是针对上述问题,提供一种用于金属掩膜版磁铁板上的磁条装卸装置,包括机台,所述机台的两侧安装有移动导轨,所述移动导轨上都配设有移动支架,两个所述移动支架通过滑杆固定连接,所述滑杆上设有滑动升降装置,所述滑动升降装置的下方安装有磁力吸附装置。
5.进一步的,所述滑动升降装置包括与所述滑杆滑动连接的滑座,所述滑座的上方设有设备箱体,所述设备箱体内设有与所述设备箱体滑动连接的传动杆,所述设备箱体内还装有步进电机,所述步进电机输出端与传动齿轮啮合,所述传动齿轮与所述传动杆啮合。
6.进一步的,所述滑座延滑杆方向滑动。
7.进一步的,所述设备箱体内安装有控制器。
8.进一步的,所述滑座上设有锁紧螺丝。
9.进一步的,所述磁力吸附装置包括压板,所述压板的四角上方竖直安装有直筒,且四个所述直筒之间设有四脚架,所述四脚架的四个脚分别设置于所述直筒内,所述直筒内设有弹簧,所述弹簧处于所述四脚架与所述压板之间,所述四脚架中间与电磁铁棒固定连接,所述电磁铁棒的下方安装有吸附头,所述电磁铁棒的另一端与传动杆的一端连接。所述吸附头能够上下运动。
10.进一步的,所述吸附头的侧壁上安装有霍尔传感器和距离传感器。
11.与现有的技术相比具有以下有益效果:
12.本发明结构简单,实现了人工手动安装的替代,可完全避免可能的人员受伤风险,还可以实现对磁铁板上单个磁条进行单独拆卸和安装,而且在拆卸过程中不会影响其他磁条,从而保障整个磁铁板的磁力均一性。
附图说明
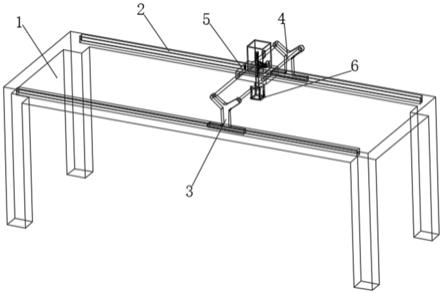
13.图1是本发明立体结构示意图;
14.图2是本发明滑动升降装置结构示意图;
15.图3是本发明磁力吸附装置结构示意图;
16.图4是本发明磁力吸附装置装卸演示图;
17.图中,机台1、移动导轨2、移动支架3、滑杆4、滑动升降装置5、磁力吸附装置6、磁条7、钢板8、滑座501、设备箱体502、步进电机503、传动齿轮504、传动杆505、锁紧螺丝506、控制器507、压板601、直筒602、四脚架603、吸附头604、电磁铁棒605、弹簧606。
具体实施方式
18.以下实施例仅处于说明性目的,而不是想要限制本发明的范围。
19.实施例
20.如图1-4所示,一种用于金属掩膜版磁铁板上的磁条装卸装置,包括机台1,机台1的两侧安装有移动导轨2,移动导轨2上都配设有移动支架3,两个移动支架3通过滑杆4固定连接,滑杆4上设有滑动升降装置5,滑动升降装置5的下方安装有磁力吸附装置6。
21.滑动升降装置5包括与滑杆4滑动连接的滑座501,滑座501的上方设有设备箱体502,设备箱体502内设有与设备箱体502滑动连接的传动杆505,其中,设备箱体502内设有与传动杆505配合使用滑槽,设备箱体502内还装有步进电机503,步进电机503输出端与传动齿轮504啮合,传动齿轮504与传动杆505啮合。所述滑座501延滑杆4方向滑动。滑座501上设有锁紧螺丝506,通过拧紧锁紧螺丝506使得锁紧螺丝506抵住滑杆4,从而固定滑座501。
22.磁力吸附装置6包括压板601,压板601的四角上方竖直安装有直筒602,且四个直筒602之间设有四脚架603,四脚架603的四个脚分别设置于直筒602内,直筒602内设有弹簧606,弹簧606处于四脚架603与压板601之间,四脚架603中间与电磁铁棒605固定连接,电磁铁棒605的下方安装有吸附头604,所述电磁铁棒605的另一端与传动杆505的一端连接;吸附头604的侧壁上安装有霍尔传感器和距离传感器;设备箱体502内安装有控制器507,控制器507分别与霍尔传感器、距离传感器以及步进电机电连接。电磁铁棒605上设置有线圈。
23.本发明的磁条安装工况:将钢板放置于机台1上,由操作人员将要安装的磁条7放置于电磁吸附杆的吸附头604,控制器507接收霍尔传感器反馈的信号,进行磁铁极性判断并调控电磁铁棒605上线圈的输入电流的方向,此时,吸附头604产生相应的极性与磁条7紧紧吸附,再通过移动支架3和滑座501滑动来进行定位,然后控制器507控制步进电机503运行,通过传动齿轮504带动吸附头604向下运动直至磁条7与钢板8直接接触,然后断开线圈中电流,最后发出复位信号,通过步进电机503将吸附头604移至初始位置。
24.本发明的磁条拆卸工况:通过移动支架3和滑座501滑动来进行定位,将吸附头604移至要取卸磁条7的上方,打开开关,控制器507识别作业工况并发出相应的控制信号。
25.首先步进电机503接收控制信号实现步进,通过传动齿轮504带动吸附头604及压板601一起向下运动,其中,压板601为矩形框状且中间镂空面积大于磁条7面积,同时,距离传感器进行测距并将信号反馈至控制器507,由控制器507判断吸附头604是否触及要取卸的磁条7,在此向下运动的过程中,压板601率先触及钢板上的其他磁条,触及后,压板601停止运动,吸附头604带着四脚架603继续向下运动,此时弹簧606将被压缩,弹簧606的反作用
力将压板601紧紧的压在磁条7上,防止吸取磁条时周围磁条受到影响。吸附头604若触及磁条7,则发出运动停止信号将步进电机503制动,此时控制器507根据霍尔传感器反馈的信号,进行磁铁7极性判断调控电磁铁棒605上线圈的输入电流的方向,此时,吸附头604产生相应的极性与磁条7紧紧吸附,接着控制器507控制步进电机503反转,带动吸附头604向上运动至限位点,在此复位过程中,吸附头604先向上运动,压板601在弹簧606的压缩力下仍紧紧贴附在周围磁条上,直至吸附头604吸附出磁条7向上运动至弹簧原长处时,将带动压板601一起向上运动至初始位置。此时,将本装置移至别处,按下开关,断开线圈中电流,取下磁条7完成拆卸。
26.本发明可以以其他的具体形式实现,而不脱离其精神和本质特征。因此,当前的实施例在所有方面都被看作是示例性的而非限定性的,本发明的范围由所附权利要求而非上述描述定义,并且,落入权利要求的含义和等同物的范围内的全部改变从而都被包括在本发明的范围之中。并且,在不同实施例中出现的不同技术特征可以进第一组合,以取得有益效果。本领域技术人员在研究附图、说明书及权利要求书的基础上,应能理解并实现所揭示的实施例的其他变化的实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1