一种高炉水渣环保型底滤池系统的制作方法
1.本发明涉及高炉炼铁设备技术领域,具体的是一种高炉水渣环保型底滤池系统。
背景技术:
2.高炉冶炼时会产生高温液态熔渣(1350℃-1500℃),国内每年生产铁水产生高温液态熔渣约2.8亿吨。
3.国内外通常采用沉淀过滤法(常称底滤法)水渣工艺对熔渣进行处理。高炉炉前进行水力冲渣,用水淬将熔渣击碎后,变成松散的渣水混合物(常称水渣),水渣经冲渣沟进入底滤池。液态水经过底滤池内的多层滤料过滤,在底滤池滤料顶部留下固态的湿润的渣粒,然后通过桥式抓斗起重机对渣粒进行抓取、装车外运。经水淬后得到的渣粒(粒径0.2mm-3mm)用途广泛,可以作为水泥用料、隔热填料等,使炉渣得到充分利用。
4.现有的抓渣设备都是桥式抓斗起重机,也是高炉炼铁水渣系统最常见的抓渣设备。桥式抓斗起重机位于底滤池上方在高架轨道上运行,高架轨道坐落在高大的水泥柱或者金属支架上,其轨面高度一般超过10米,给设备的维护和检修带来很大困难。
5.桥式抓斗起重机的抓斗与行车机构的连接和驱动都是通过钢丝绳完成的,抓斗与行车机构之间属于柔性连接。抓斗在过滤池内完成抓渣作业后需要运行到运渣汽车上方进行卸渣作业。抓斗起重机的小车机构运行到运渣汽车上方停止后,抓斗由于惯性作用,会产生小幅的摇摆,在卸料时不可避免地会发生撒料情况,现场工人需要清理洒落的渣粒,增加了现场工人的额外工作量。
6.对于桥式抓斗起重机,通过钢丝绳驱动抓斗的上升和下降,抓斗的下降高度难以准确控制,抓斗抓渣时容易对过滤池中的滤料结构造成破坏,严重影响过滤效果,对水渣工艺的过滤系统造成重要影响。
7.由于过滤池内冲渣水水量多、温度高,散发出大量的含硫蒸汽,尤其冬季气温低,蒸汽量更大。水渣蒸汽具有腐蚀性,在散发过程中污染周边环境,腐蚀周围的设备,同时由于过滤池距高炉的距离很近,因此散发的蒸汽也会对高炉设备造成一定的腐蚀。
技术实现要素:
8.为了解决上述含硫蒸汽腐蚀设备、桥式抓斗起重机抓渣精度差和维护困难的问题,本发明提供了一种高炉水渣环保型底滤池系统,其中,所述低矮型抓渣设备解决了桥式抓斗起重机抓斗的摆动问题避免撒料并且能够实现精准抓渣避免破坏底滤池滤料结构;利用该底滤池密封罩对整个底滤池进行密封,还解决了底滤池含硫蒸汽污染问题。
9.本发明解决其技术问题所采用的技术方案是:
10.一种高炉水渣环保型底滤池系统,包括底滤池、底滤池密封罩和粒化塔,底滤池的上方设有低矮型抓渣设备,所述低矮型抓渣设备位于底滤池密封罩内,底滤池密封罩与粒化塔之间连接有蒸汽管道;所述低矮型抓渣设备包括依次设置的大车轨道、大车机构、小车轨道、小车机构和挖渣装置,挖渣装置含有依次设置的安装底座、第一摆臂、第二摆臂和抓
斗机构,安装底座通过旋转装置与小车机构连接,挖渣装置能够绕转动轴线转动,所述转动轴线为直立状态,抓斗机构能够移动至大车轨道的下方或小车机构的上方。
11.粒化塔内设有喷淋装置,蒸汽管道的一端与粒化塔连接,蒸汽管道的一端位于喷淋装置的下方,蒸汽管道的另一端与底滤池密封罩连接,蒸汽管道的另一端位于底滤池密封罩的上部;底滤池密封罩上设有运渣汽车的出入口和/或运渣胶带机通道口。
12.大车轨道、大车机构、小车轨道、小车机构和安装底座的总高度为1.5米-2.5米;底滤池的两侧外均设有挡水墙,两条大车轨道对应地位于两个挡水墙上,大车轨道和挡水墙均沿底滤池的长度方向延伸,挡水墙的高度为1米-2米。
13.旋转装置位于小车机构上,旋转装置呈直立的圆柱形结构或圆筒形结构,小车机构内设有旋转驱动装置,旋转驱动装置能够驱动旋转装置自转,旋转装置的轴线与所述绕转动轴线重合。
14.当抓斗机构位于最低点时,抓斗机构能够对底滤池底部的渣粒进行挖渣清理;当抓斗机构位于最高点时,抓斗机构能够对运渣汽车进行卸渣作业。
15.安装底座、第一摆臂、第二摆臂和抓斗机构依次铰接,第一摆臂为弯曲结构,第一摆臂与安装底座的连接处位于安装底座的周侧,安装底座与第一摆臂之间连接有第一液压缸,第一液压缸能够驱动第一摆臂摆动,第一摆臂与第二摆臂之间连接有第二液压缸,第二液压缸能够驱动第二摆臂摆动。
16.抓斗机构含有从上向下依次连接的吊挂支座、开闭液压缸、抓斗支架以及左右对称设置的两个抓斗,吊挂支座与第二摆臂铰接,两个抓斗的上部均与抓斗支架铰接,两个抓斗的上部均通过抓斗连杆与开闭液压缸的缸筒铰接,开闭液压缸伸缩能够使两个抓斗的下部张开或闭合。
17.两个抓斗互为镜像,抓斗含有两块平行间隔设置的端板,两块端板之间设有外周板,端板的下部外层叠连接有长条推板,当两个抓斗的下部闭合时,长条推板的长度方向平行于水平面,长条推板的下侧边平行于水平面,长条推板的下侧边与端板的下端齐平。
18.所述低矮型抓渣设备还包括抓斗机构控制系统,抓斗机构控制系统含有抓斗机构水平位置控制系统、抓斗机构高度位置控制系统和抓斗机构挖渣卸渣动作控制系统。
19.抓斗机构水平位置控制系统含有大车机构控制模块和小车机构控制模块,大车机构控制模块能够控制大车机构在大车轨道上的位置,小车机构控制模块能够控制小车机构在小车轨道上的位置;抓斗机构高度位置控制系统含有第一液压缸控制模块和第二液压缸控制模块,第一液压缸控制模块能够控制第一液压缸的伸缩长度,第二液压缸控制模块能够控制第二液压缸的伸缩长度;抓斗机构挖渣卸渣动作控制系统含有开闭液压缸控制模块和赶料动作控制模块,开闭液压缸控制模块能够控制开闭液压缸伸缩,赶料动作控制模块能够使抓斗机构推动渣粒形成堆积。
20.本发明的有益效果是:
21.1、该高炉水渣环保型底滤池系统含有低矮型抓渣设备,该低矮型抓渣设备总高度为1.5米-2.5米,该低矮型抓渣设备位于底滤池的挡水墙上(挡水墙的高度一般低于2米),挡水墙高度远低于桥式抓斗起重机轨面高度(一般超过10米),容易进行整体封闭,易于维护。
22.2、有效解决了普通抓斗起重机常见的抓斗摇摆问题,避免发生撒料情况。
23.3、通过控制液压缸的伸出长度,实现对抓斗机构高度的精准控制,避免挖渣时抓斗机构高度过低破坏底滤池滤料结构。
24.4、采用液压驱动容易实现对抓渣系统无人化控制。
25.5、液压挖渣系统采用液压驱动,动作平稳、设备反应快,能够高速启动和频繁换向,能够大幅提高挖渣和卸渣的工作效率。
26.6、当底滤池底部渣粒厚度不大时,如果采用桥式抓斗起重机,此时的清渣效率会很低;而抓斗利用摆臂和液压缸进行刚性连接,可以在渣粒厚度不大时进行赶料的动作,把渣粒堆积后再进行抓渣清理工作,大幅提高工作效率。
附图说明
27.构成本技术的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
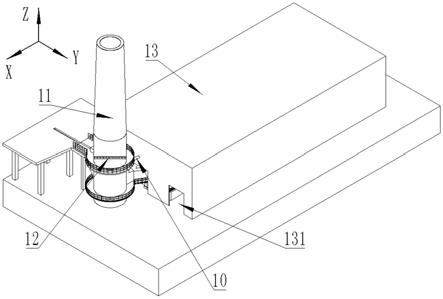
28.图1是本发明所述高炉水渣环保型底滤池系统的总体示意图。
29.图2是所述低矮型抓渣设备在挖渣作业时的示意图。
30.图3是所述低矮型抓渣设备在卸渣作业时的示意图。
31.图4是挖渣装置的示意图。
32.图5是挖渣装置与小车机构连接的示意图。
33.图6两个抓斗的下部张开时的示意图。
34.图7两个抓斗的下部闭合时的示意图。
35.图8是所述低矮型抓渣设备的控制部分的示意图。
36.图9是两个抓斗的下部设置长条推板时的示意图。
37.1、大车轨道;2、大车机构;3、小车轨道;4、小车机构;5、挖渣装置;6、卸料斗;7、运渣汽车;8、底滤池;9、抓斗机构控制系统;10、蒸汽管道;11、粒化塔;12、喷淋装置;13、底滤池密封罩;
38.41、旋转装置;42、旋转驱动装置;
39.51、安装底座;52、第一摆臂;53、第二摆臂;54、抓斗机构;55、第一液压缸;56、第二液压缸;
40.81、挡水墙;
41.91、抓斗机构水平位置控制系统;92、抓斗机构高度位置控制系统;93、抓斗机构挖渣卸渣动作控制系统;
42.131、出入口;
43.541、吊挂支座;542、开闭液压缸;543、抓斗支架;544、抓斗连杆;545、抓斗;546、端板;547、外周板;548、长条推板;
44.911、大车机构控制模块;912、小车机构控制模块;921、第一液压缸控制模块;922、第二液压缸控制模块;931、开闭液压缸控制模块;932、赶料动作控制模块。
具体实施方式
45.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
46.一种高炉水渣环保型底滤池系统,包括底滤池8、底滤池密封罩13和粒化塔11,底滤池8的上方设有低矮型抓渣设备,所述低矮型抓渣设备位于底滤池密封罩13内,底滤池密封罩13与粒化塔11之间连接有蒸汽管道10;所述低矮型抓渣设备包括从下向上依次连接的大车轨道1、大车机构2、小车轨道3、小车机构4和挖渣装置5,挖渣装置5含有依次连接的安装底座51、第一摆臂52、第二摆臂53和抓斗机构54,安装底座51通过旋转装置41与小车机构4连接,挖渣装置5能够绕转动轴线l转动,所述转动轴线l为直立状态,抓斗机构54能够移动至大车轨道1的下方或小车机构4的上方,如图1至图5所示。
47.其中,所述低矮型抓渣设备解决了桥式抓斗起重机抓斗的摆动问题避免撒料并且能够实现精准抓渣避免破坏底滤池滤料结构;利用该底滤池密封罩对整个底滤池进行密封,还解决了底滤池含硫蒸汽污染问题。
48.在本实施例中,粒化塔11内设有喷淋装置12,蒸汽管道10的一端与粒化塔11连接,蒸汽管道10的一端位于喷淋装置12的下方,蒸汽管道10的另一端与底滤池密封罩13连接,蒸汽管道10的另一端位于底滤池密封罩13的上部;底滤池密封罩13上设有运渣汽车7的出入口131,或者底滤池密封罩13上设有运渣胶带机通道口,或者底滤池密封罩13上设有运渣汽车7的出入口131和运渣胶带机通道口。
49.底滤池密封罩13把底滤池8、低矮型抓渣系统全部密封在其内部空间,能够避免底滤池8散发的含硫蒸汽对空排放。底滤池8内散发的含硫蒸汽经蒸汽管道10进入粒化塔喷淋装置12的下方,底滤池蒸汽在粒化塔11喷淋冷凝水的作用下凝结成水滴落入粒化塔11底部,实现含硫蒸汽的零排放和水资源的循环利用。
50.挖渣装置5可以采用现有工程装备中的挖土机,去掉履带或车轮后与小车机构4相结合,并将其铲斗改造为抓斗机构54,从而形成了新的精准挖渣系统,不但能够确保新设备动作的可靠性,而且能够实现精准挖渣完成渣粒清理作业,还可以降低高炉水渣环保型底滤池系统的整体高度低,易于维护。
51.在本实施例中,所述高炉水渣环保型底滤池系统还包括挡水墙81,挡水墙81位于底滤池的两侧8外,两条大车轨道1一一对应地固定于两个挡水墙81上,大车轨道1和挡水墙81均沿底滤池8的长度方向延伸,挡水墙81的高度为1米-2米。大车轨道1、大车机构2、小车轨道3、小车机构4和安装底座51的总高度为1.5米-2.5米(例如2.2米)。所述高炉水渣环保型底滤池系统远低于现有桥式抓斗起重机轨面高度(一般超过10米)。
52.在本实施例中,大车机构2能够沿大车轨道1移动,小车轨道3固定于大车机构2上,挖渣装置5和小车机构4能够沿小车轨道3同步移动。在以x、y、z轴为坐标轴的空间直角坐标系中,底滤池8的长度方向与x轴方向平行,底滤池8的宽度方向与y轴方向平行,所述转动轴线l与z轴方向平行,即大车机构2能够沿x轴方向移动,挖渣装置5和小车机构4能够沿y轴方向同步移动。大车轨道1、大车机构2、小车轨道3和小车机构4均可以采用现有技术产品。
53.根据挖渣和卸渣作业的需求,大车机构2可以通过大车轨道1带动挖渣装置5沿底滤池8的长度方向往复运动,小车机构4可以通过大车机构2上的小车轨道3带动挖渣装置5沿底滤池8的宽度方向往复运动。
54.在本实施例中,旋转装置41安装于小车机构4上,旋转装置41可以呈直立的圆柱形结构或圆筒形结构,小车机构4内设有旋转驱动装置42,旋转驱动装置42能够驱动旋转装置41自转,旋转装置41的轴线与所述绕转动轴线l重合,从而驱动挖渣装置5以所述绕转动轴
线l为轴360度转动,以便在底滤池8内不同的位置进行挖渣或为运渣汽车7卸渣,如图1至图5所示。
55.在本实施例中,挖渣装置5能够控制抓斗机构54上下摆动以及转动,当抓斗机构54位于最低点时,抓斗机构54能够对底滤池8底部的渣粒进行挖渣清理;当抓斗机构54位于最高点时,抓斗机构54能够对运渣汽车7进行卸渣作业。底滤池8外的地面上可以设有卸料斗6,卸料斗6含有上下设置的泄料漏斗和漏斗支架,卸渣作业时,运渣汽车7可以停放在该泄料漏斗的下方,抓斗机构54将挖出的渣粒卸入泄料漏斗,渣粒穿过泄料漏斗再落入运渣汽车7内。
56.在本实施例中,安装底座51、第一摆臂52、第二摆臂53和抓斗机构54依次铰接,第一摆臂52为弯曲结构,第一摆臂52与安装底座51的连接处位于安装底座51的周侧(如前侧、后侧、左侧或右侧),安装底座51与第一摆臂52之间连接有第一液压缸55,第一液压缸55能够驱动第一摆臂52相对于安装底座51摆动,第一摆臂52与第二摆臂53之间连接有第二液压缸56,第二液压缸56能够驱动第二摆臂53相对于第一摆臂52摆动。第一摆臂52和第二摆臂53在第一液压缸55和第二液压缸56的作用下能够控制抓斗机构54的高度。
57.在本实施例中,抓斗机构54含有从上向下依次连接的吊挂支座541、开闭液压缸542、抓斗支架543以及左右对称设置的两个抓斗545,吊挂支座541与第二摆臂53铰接,两个抓斗545的上部均与抓斗支架543铰接,两个抓斗545的上部均通过抓斗连杆544与开闭液压缸542的缸筒铰接,开闭液压缸542伸缩能够使两个抓斗545的下部张开或闭合。开闭液压缸542伸长时,两个抓斗545的下部张开;开闭液压缸542缩短时,两个抓斗545的下部闭合。通过控制开闭液压缸542的动作可以实现抓斗545的抓渣和卸渣作业,如图6和图7所示。
58.在本实施例中,两个抓斗545互为镜像,抓斗545含有两块平行间隔设置的端板546,两块端板546之间设有外周板547,端板546为扇形结构,外周板547为弧形结构,抓斗545下方没有挖齿。两个抓斗545的下部张开时,两个抓斗545的下端相互分离;当两个抓斗545的下部闭合时,两个抓斗545的下端相互结合。
59.在本实施例中,所述低矮型抓渣设备还含有抓斗机构控制系统9,抓斗机构控制系统9含有抓斗机构水平位置控制系统91、抓斗机构高度位置控制系统92和抓斗机构挖渣卸渣动作控制系统93,如图8所示。通过抓斗机构水平位置控制系统91、抓斗机构高度位置控制系统92、抓斗机构挖渣卸渣动作控制系统93实现精准的挖渣和卸渣作业。
60.抓斗机构水平位置控制系统91含有大车机构控制模块911和小车机构控制模块912,大车机构控制模块911能够控制大车机构2在大车轨道1上的位置(即在x轴方向上的位置),小车机构控制模块912能够控制小车机构4在小车轨道3上的位置(即在y轴方向上的位置)。进而准确控制抓斗机构54的水平位置,高效精准的实现对底滤池8位置的挖渣作业和运渣汽车7位置的卸渣作业。
61.抓斗机构高度位置控制系统92含有第一液压缸控制模块921和第二液压缸控制模块922,第一液压缸控制模块921能够控制第一液压缸55的伸缩长度,第二液压缸控制模块922能够控制第二液压缸56的伸缩长度。通过第一液压缸55伸出长度判断第二液压缸56伸出长度的极限(或通过第二液压缸56伸出长度判断第一液压缸55伸出长度的极限),实现对抓斗机构54高度位置(即在z轴方向上的位置)的控制,避免挖渣时抓斗机构54高度过低破坏底滤池滤料结构。抓斗机构挖渣卸渣动作控制系统93含有开闭液压缸控制模块931,开闭
液压缸控制模块931能够控制开闭液压缸542伸缩,从而实现挖渣和卸渣作业。
62.抓斗机构挖渣卸渣动作控制系统93还含有赶料动作控制模块932,当底滤池8底部渣粒厚度较小时(例如小于500mm),直接抓渣会大幅降低设备工作效率,此时可以通过赶料动作控制模块932,使抓斗机构54通过赶料动作把渣粒堆积后再进行抓渣清理工作,大幅提高工作效率。赶料动作控制模块932可以使抓斗机构54在适当的高度并沿x轴方向或y轴方向移动,从而推动渣粒形成聚集堆积。
63.为了提高赶料效率,端板546的可以为矩形结构,当两个抓斗545的下部闭合时,端板546的下侧边平行于水平面。或者,端板546的下部外可以层叠连接有长条推板548,当两个抓斗545的下部闭合时,长条推板548的长度方向平行于水平面,长条推板548的下侧边平行于水平面,长条推板548的下侧边与端板546的下端齐平,如图9所示。
64.以上所述,仅为本发明的具体实施例,不能以其限定发明实施的范围,所以其等同组件的置换,或依本发明专利保护范围所作的等同变化与修饰,都应仍属于本专利涵盖的范畴。另外,本发明中的技术特征与技术特征之间、技术特征与技术方案、技术方案与技术方案之间均可以自由组合使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1