一种可控制的摆臂式喷砂除锈爬壁机器人
1.本实用新型涉及一种可控制的摆臂式喷砂除锈爬壁机器人,具体地说是一种带有喷砂回收专用喷头可控制的摆臂式喷砂除锈爬壁机器人,主要涉及大型油罐表面和船舶等钢结构表面喷砂除锈的防腐技术领域。
背景技术:
2.由于大型油罐内储存的油品中往往含有氢、硫化合物、有机和无机盐以及水分等腐蚀性化学物质,加上罐体外部受环境因素影响而产生腐蚀,油罐的寿命会大大缩短。如果不能及时进行防腐处理,腐蚀加剧不仅造成设备损坏,导致储罐泄漏,而且影响到油库安全生产,造成设备效率降低,影响油品质量。油品的跑、冒、漏、撒还将污染环境,危及人身安全,常常成为重大事故的导火索。现在的大型油罐清理除锈大多数都是人工操作,人工清理附着物和除锈效率比较低而且工作环境恶劣,对人的身体造成很大的影响。
技术实现要素:
3.针对上述的不足,本实用新型提供了一种可控制的摆臂式喷砂除锈爬壁机器人,目的在于提高大型油罐表面清理和除锈作业的工作效率,提高大型油罐表面清理和除锈的自动化程度。
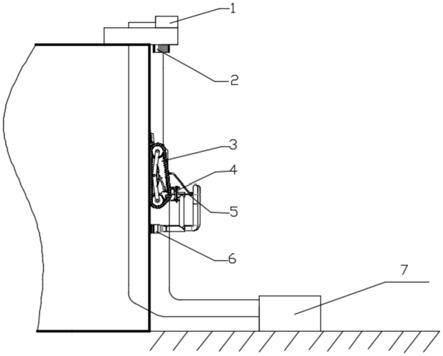
4.本实用新型是通过以下技术方案实现的:一种可控制的摆臂式喷砂除锈爬壁机器人,包括罐顶控制箱、微型同步电动葫芦、爬壁机器人、摆臂式喷砂除锈装置、管道支撑、喷砂器和地面控制台,所述罐顶控制箱安装在油罐的顶部,所述微型同步电动葫芦位于油罐顶部,通过钢丝绳与爬壁机器人连接,所述爬壁机器人利用磁吸附式结构吸附在油罐表面,搭载摆臂式喷砂除锈装置、管道支撑和喷砂器装置,所述摆臂式喷砂除锈装置位于爬壁机器人后端,所述管道支撑通过螺纹连接在爬壁机器人机身上,所述喷砂器通过紧定螺钉与摆臂式喷砂除锈装置连接,所述地面控制台放置在地面上,通过有线电缆分别向罐顶控制箱和爬壁机器人提供动力电。
5.前述的一种可控制的摆臂式喷砂除锈爬壁机器人中,所述摆臂式喷砂除锈装置包括喷砂连接管、摆臂杆、喷砂管、喷砂回收管、联轴器、电机固定板、支撑柱、减速器、伺服电机、u型固定架、伸缩调整杆、抱箍和夹紧调整螺栓,所述喷砂连接管上端与喷砂管连接,喷砂管插入喷砂连接管通过密封圈密封,紧定螺钉连接,喷砂连接管下端与喷砂器相连接,所述摆臂杆两端通过焊接连接喷砂连接管和联轴器,所述喷砂回收管与喷砂管平行,下端插入喷砂器中用密封圈密封,紧定螺钉连接,所述联轴器位于电机固定板上方,所述电机固定板与四根支撑柱上端通过螺纹连接固定,支撑柱下端通过双螺母螺纹连接固定在爬壁机器人机身上,电机固定板中间通过螺栓与减速器连接固定,所述减速器位于伺服电机上方,减速器输出轴与联轴器连接,用紧定螺钉固定,所述伺服电机位于爬壁机器人内仓底部,伺服电机输出轴与减速器连接配套使用,所述u型固定架位于爬壁机器人内仓底部,通过焊接连接在爬壁机器人内仓壁上,所述伸缩调整杆通过螺母连接在u 型固定架上,另一端与抱箍
焊接,所述抱箍位于爬壁机器人内仓底部抱紧伺服电机,所述夹紧调整螺栓位于抱箍的两侧。
6.前述的一种可控制的摆臂式喷砂除锈爬壁机器人中,所述管道支撑包括垂直支撑、斜支撑、旋转平台、上管道压盖、下管道支撑托和旋转轴,所述垂直支撑为两根竖直的圆柱杆,通过螺纹连接在爬壁机器人机身上,所述斜支撑是两根有角度弯曲的圆柱杆,一端与垂直支撑焊接,另一端通过螺纹连接在爬壁机器人上,所述旋转平台通过焊接固定在两根垂直支撑上,所述下管道支撑托和上管道压盖位于旋转平台上方,两者通过螺栓螺母连接固定,下管道支撑托下端焊接旋转轴与旋转平台通过螺母连接。
7.前述的一种可控制的摆臂式喷砂除锈爬壁机器人中,所述喷砂器包括喷砂防尘罩、喷束保护罩、喷嘴和喷砂回收通道,所述喷束保护罩安装在喷砂防尘罩内,喷束保护罩上端与喷嘴连接,下端距喷砂器底端2mm,所述喷嘴是前述喷砂管的出口,插入喷束保护罩内,所述喷砂回收通道位于喷砂器结构的侧面,通过焊接与喷砂防尘罩连接,输出口与前述喷砂回收管通过密封圈密封,紧定螺钉连接。
8.该实用新型的有益之处是:与现有技术相比,本实用新型将摆臂式喷砂除锈装置、管道支撑和喷砂器共同连接固定在到爬壁机器人上,本技术采用可控制的摆臂式喷砂除锈装置来实现往复摆动喷砂除锈功能,在爬壁机器人行走过程中,摆臂机构通过与伺服电机、减速器相互配合,来进行往复摆动式喷砂除锈作业,除锈后的喷砂颗粒通过喷砂回收管道进行回收利用,在机器人前进的同时摆臂喷砂除锈机构通过伺服电机驱动进行左右的摆动喷砂除锈,喷砂后的面积为扇形区域,喷砂范围广、除锈效率高。本实用新型的优势是该机器人完全替代了人工除锈,减轻了劳动力并降低了粉尘对人体的伤害,大大提高了除锈的效率且在除锈后无粉尘污染,因此该除锈装置既保证了喷砂除锈的质量,也降低喷砂面积重复率,进而提高了喷砂除锈的效率。
附图说明
9.附图1为本实用新型的总体结构示意图;
10.附图2为本实用新型图1的摆臂式喷砂除锈装置机构示意图;
11.附图3为本实用新型图1的管道支撑结构示意图;
12.附图4为本实用新型图1的喷砂器结构示意图;
13.图中,1、罐顶控制箱,2、微型同步电动葫芦,3、爬壁机器人,4、摆臂式喷砂除锈装置,401、喷砂连接管,402、摆臂杆,403、喷砂管,404、喷砂回收管,405、联轴器,406、电机固定板,407、支撑柱,408、减速器, 409、伺服电机,410、u型固定架,411、伸缩调整杆,412、抱箍,413、夹紧调整螺栓,5、管道支撑,501、垂直支撑,502、斜支撑,503、旋转平台,504、上管道支撑压盖,505、下管道支撑托,506、旋转轴,6、喷砂器, 601、喷砂防尘罩,602、喷束保护罩,603、喷嘴,604、喷砂回收通道,7、地面控制台。
具体实施方式
14.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下
所获得的所有其他实施例,都属于本实用新型保护的范围。
15.请参阅图1,本实用新型提供一种技术方案:一种可控制的摆臂式喷砂除锈爬壁机器人,包括罐顶控制箱1、微型同步电动葫芦2、爬壁机器人3、摆臂式喷砂除锈装置4、管道支撑5、喷砂器6和地面控制台7,所述罐顶控制箱1安装在油罐的顶部,所述微型同步电葫芦2位于油罐顶部,通过钢丝绳与爬壁机器人3连接,所述爬壁机器人3利用磁吸附式结构吸附在油罐表面,搭载摆臂式喷砂除锈装置4、管道支撑5和喷砂器6装置,所述摆臂式喷砂除锈装置4位于爬壁机器人后端,所述管道支撑5通过螺纹连接在爬壁机器人机身上,所述喷砂器6通过紧定螺钉与摆臂式喷砂除锈装置4连接,所述地面控制台7放置在地面上,通过有线电缆分别向罐顶控制箱和爬壁机器人提供动力电。
16.请参阅图2,前述的一种可控制的摆臂喷砂除锈爬壁机器人中,所述摆臂式喷砂除锈装置4包括喷砂连接管401、摆臂杆402、喷砂管403、喷砂回收管404、联轴器405、电机固定板406、支撑柱407、减速器408、伺服电机409、u型固定架410、伸缩调整杆411、抱箍412和夹紧调整螺栓413,所述喷砂连接管401上端与喷砂管403连接,喷砂管403插入喷砂连接管 401通过密封圈密封,紧定螺钉连接,喷砂连接管下端与喷砂器6相连接,所述摆臂杆402两端通过焊接连接喷砂连接管401和联轴器405,所述喷砂回收管404与喷砂管403平行,下端插入喷砂器6中用密封圈密封,紧定螺钉连接,所述联轴器405位于电机固定板406上方,所述电机固定板406 与四根支撑柱407上端通过螺纹连接固定,支撑柱407下端通过双螺母螺纹连接固定在爬壁机器人机身上,电机固定板406中间通过螺栓与减速器 408连接固定,所述减速器408位于伺服电机409上方,减速器408输出轴与联轴器405连接,用紧定螺钉固定,所述伺服电机409位于爬壁机器人内仓底部,伺服电机409输出轴与减速器408连接配套使用,所述u型固定架410位于爬壁机器人内仓底部,通过焊接连接在爬壁机器人内仓壁上,所述伸缩调整杆411通过螺母连接在u型固定架410上,另一端与抱箍412 焊接,所述抱箍412位于机器人内仓底部抱紧伺服电机409,所述夹紧调整螺栓413位于抱箍的两侧。
17.请参阅图3,前述的一种可控制的摆臂喷砂除锈爬壁机器人中,所述管道支撑5包括垂直支撑501、斜支撑502、旋转平台503、上管道压盖504、下管道支撑托505和旋转轴506。所述垂直支撑501为两根竖直的圆柱杆,通过螺纹连接在爬壁机器人机身上,所述斜支撑502为两根有角度弯曲的圆柱杆,一端与垂直支撑501焊接,另一端通过螺纹连接在爬壁机器人上,所述旋转平台503通过焊接固定在两根垂直支撑501上,所述下管道支撑托505和上管道压盖504位于旋转平台503上方,两者通过螺栓螺母连接固定,下管道支撑托505下端焊接旋转轴506与旋转平台503通过螺母连接。
18.请参阅图4前述的一种可控制的摆臂喷砂除锈爬壁机器人中,所述喷砂器6包括喷砂防尘罩601、喷束保护罩602、喷嘴603和喷砂回收通道 604。所述喷束保护罩602安装在喷砂防尘罩601内,喷束保护罩602上端与喷嘴603连接,下端距喷砂器底端2mm,所述喷嘴603是前述喷砂管的出口,插入喷束保护罩602内,所述喷砂回收通道604位于喷砂器结构的侧面,通过焊接与喷砂防尘罩601连接,输出口与前述喷砂回收管通过密封圈密封,紧定螺钉连接。
19.工作原理:当机器人在大型油罐表面进行清理除锈工作时,地面控制台7通过有线电缆分别向罐顶控制箱1和爬壁机器人3提供动力电,并发送信号给罐顶控制箱1,罐顶控制箱1通过以太网发送信号来控制微型电动葫芦2和爬壁锈机器人3实现同步移动,微型同步
电葫芦2位于油罐顶部,通过钢丝绳与爬壁机器人3连接,防止机器人坠落下滑。
20.一种可控制的摆臂式喷砂除锈爬壁机器人吸附在油罐表面,喷砂器6 通过伺服电机409可实现固定角度和固定速度往复摆动。伺服电机409作为动力及控制装置,通过抱箍412抱紧,夹紧调整螺栓413调整夹紧程度,伸缩调整杆411焊接在u型固定架410上,通过调整螺母来调整伸缩距离, u型固定架410焊接在内仓壁上,用这种方法将伺服电机409固定在内仓底部中心;控制伺服电机409的正反转及转速,然后经过减速器408得到所需的转速和扭矩,再通过联轴器405与摆臂杆402、喷砂连接管401连接,这样摆臂机构就会随着伺服电机409的控制进行往复摆动,喷砂管403 插入到喷砂连接管401上端口,喷砂回收管404插入喷砂器6中,喷砂管403和喷砂回收管404通过管道支撑装置5支托,同时也会随着摆臂杆402 的摆动而摆动,进而达到往复摆动的效果。喷砂颗粒通过喷砂管403沿喷砂连接管401的喷嘴603进入喷束保护罩602,喷束保护罩602的作用是防止在喷砂过程时喷砂束在接触到油罐表面前通过喷砂回收通道回收,喷砂颗粒喷涂到油罐表面完成喷砂除锈,除锈面积为扇形区域,喷砂范围广、除锈效率高,除锈后的颗粒通过喷砂回收通道604进入喷砂回收管404回收后重新利用,从而降低了对人体的伤害和环境的污染,节省了资源和空间。尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1