一种碳化钨烧结半圆舟皿自动卸料装置的制作方法
1.本实用新型涉及卸料装置技术领域,特别涉及一种碳化钨烧结半圆舟皿自动卸料装置。
背景技术:
2.碳化钨是用来生成硬质合金的主要原料,是一种电、热的良好导体。目前硬质合金行业的碳化钨烧结环节的半圆舟物料卸料基本采用人工手动倒料的方式进行,存在倒料复杂、粉尘较多、容易造成舟皿碰撞损坏以及工作强度大的问题,此外,由于现场工作温度较高,采用人工手动倒料还容易造成汗渍污染粉料的问题。
技术实现要素:
3.为解决上述问题,本实用新型提供了一种碳化钨烧结半圆舟皿自动卸料装置。
4.本实用新型采用以下技术方案:
5.一种碳化钨烧结半圆舟皿自动卸料装置,包括机架以及位于机架上的卸料机构、推舟机构、物料传送机构和用于盛放物料的舟皿,所述卸料机构的两侧分别为输入端和输出端,所述卸料机构由舟皿夹具、超声脱模器、旋转传动器组成,所述舟皿夹具用于夹紧所述舟皿,所述旋转传动器与所述舟皿夹具相连接并带动所述舟皿夹具向前翻转,所述物料传送机构位于所述卸料机构的前方,所述推舟机构用于将所述舟皿从所述输入端推入所述舟皿夹具以及将物料从所述舟皿夹具推出所述输出端。
6.进一步地,所述超声脱模器安装在所述舟皿夹具的底部。
7.进一步地,还包括负压除尘器,所述负压除尘器位于所述卸料机构的下方。
8.进一步地,所述舟皿的横截面为半圆形。
9.进一步地,所述推舟机构由位于所述输入端的伺服推舟装置、满舟储架和位于所述输出端的空舟储架组成,所述伺服推舟装置位于所述满舟储架的外侧。
10.进一步地,所述伺服推舟装置用于将所述舟皿从所述满舟储架上推入所述舟皿夹具以及将所述舟皿从所述舟皿夹具推出到所述空舟储架上。
11.进一步地,所述伺服推舟装置由伺服电机和伸缩推杆组成。
12.进一步地,所述满舟储架和空舟储架上均设置有传送带。
13.进一步地,所述物料传送机构用于传送掉落在其上方的物料,所述物料传送结构上方设置有传送带。
14.进一步地,还包括控制模块,所述控制模块用于控制所述卸料机构、推舟机构、物料传送机构以及负压除尘器,所述控制模块采用plc逻辑控制器。
15.采用上述技术方案后,本实用新型与背景技术相比,具有如下优点:
16.1、本实用新型的自动卸料装置使用时,伺服推舟装置将装满物料的舟皿推入舟皿夹具,旋转传动器带动舟皿夹具向前翻,超声波脱模器启动进行物料脱模,物料从舟皿上脱落掉落在物料传送机构上,同时超声脱模器停止工作且旋转传动器反向旋转将舟皿夹具和
空的舟皿一起复原到原始位置伺服推舟装置将卸料后的空的舟皿推送出舟皿夹具直到空的舟皿安全准确放置在空舟储存架上,然后物料传送机构上的传送带进行间歇移位为下一个物料留下空挡位置、伺服推舟装置推空的舟皿完成后复位、满舟储架上的传送带自动移位将下一个装满物料的舟皿传送到推舟位置、空舟储架上的传送带相应进行移位为下一个空的舟皿到来腾出位置,由此完成一个卸料流程的循环并进入下一个卸料循环,如此重复循环实现不间断自动卸料;
17.2、本实用新型设置了满舟储架和空舟储架用于储存舟皿,并通过伺服推舟装置将装满物料的舟皿精准地从满舟储架推入到舟皿夹具,待物料从舟皿倒出后,再将空的舟皿从舟皿夹具推出到空舟储架上,从而实现舟皿按顺序逐个自动传送,无需人工卸料,简化倒料流程、减少工作量、降低生产成本、避免物料被汗渍污染;
18.3、设置了舟皿夹具能够起到固定舟皿的作用,保证舟皿在卸料过程中不会松动掉落,从而保证舟皿的安全性;
19.4、在舟皿夹具的底部设置了超声脱模器,利用超声波独有的特点,使物料从舟皿上脱膜更容易、更干净,且不损伤舟皿模具,降低产品物料损害比,提高物料产品质量;
20.5、物料传送机构将卸下来物料进行间歇性地传送,同时可将每个舟皿所卸的物料分开,避免不同批次的卸下的物料的混合,无需人工清点和找寻,方便后续物料的检查,提高现场物料管理水平;
21.6、负压除尘器利用负压原理将卸料时产生的粉尘进行收集,防止粉尘飞扬造成环境污染,保证人身安全,同时回收的细微粉尘可以再次利用,提高粉末回收率,以节约资源;
22.7、通过控制模块控制卸料机构、推舟机构、物料传送机构以及负压除尘器,使整个自动卸料装置能够有序运转,保证卸料各环节的连续性、稳定性和可靠性,还可实时采集和存储数据,满足现场自动化控制需求和设备外联需求,方便车间系统组网和多设备协调生产。
附图说明
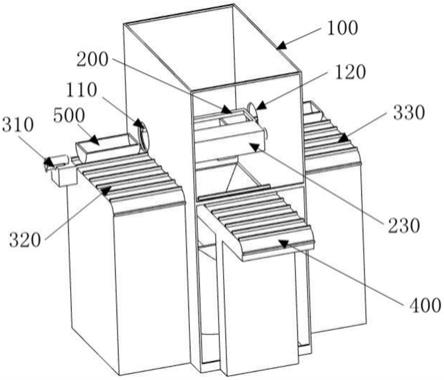
23.图1为本实用新型的正面结构示意图;
24.图2为本实用新型的背面结构示意图。
25.附图标记说明:
26.100、机架;110、输入端;120、输出端;
27.200、卸料机构;210、舟皿夹具;220、超声脱模器;230、旋转传动器;
28.300、推舟机构;310、伺服推舟装置;311、伺服电机;312、伸缩推杆;320、满舟储架;330、空舟储架;
29.400、物料传送机构;
30.500、舟皿;
31.600、负压除尘器。
具体实施方式
32.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释
本实用新型,并不用于限定本实用新型。
33.在本实用新型中需要说明的是,术语“上”“下”“左”“右”“竖直”“水平”“内”“外”等均为基于附图所示的方位或位置关系,仅仅是为了便于描述本实用新型和简化描述,而不是指示或暗示本实用新型的装置或元件必须具有特定的方位,因此不能理解为对本实用新型的限制。
实施例
34.如图1、图2所示,一种碳化钨烧结半圆舟皿500自动卸料装置,包括机架100以及位于机架100上的卸料机构200、推舟机构300、物料传送机构400和用于盛放物料的舟皿500,所述卸料机构200的两侧分别为输入端110和输出端120,所述卸料机构200由舟皿夹具210、超声脱模器220、旋转传动器230组成,所述舟皿夹具210用于夹紧所述舟皿500,所述旋转传动器230与所述舟皿夹具210相连接并带动所述舟皿夹具210向前翻转,所述物料传送机构400位于所述卸料机构200的前方,所述推舟机构300用于将所述舟皿500从所述输入端110推入所述舟皿夹具210以及将物料从所述舟皿夹具210推出所述输出端120。
35.其中,舟皿夹具210是通过一可旋转的轴承连接在所述旋转传动器230上,当旋转传动器230启动时,带动轴承转动,从而带动舟皿夹具210向前翻转卸料。此外,所述舟皿夹具210采用弧形的轨道,所述轨道的两侧壁向内折叠形成用于卡紧所述舟皿500的卡接部,所述轨道的两端采用开口式设计,一方面是便于舟皿500的输入和输出,另一方面可适应物料表面超出舟皿500边沿或物料表面未超出舟皿500边沿的情况
36.所述超声脱模器220安装在所述舟皿夹具210的底部。超声脱模器220的强度参数可根据实际情况进行调整和设置以满足不同料况的舟皿500的脱模,保证顺利卸料。
37.还包括负压除尘器600,所述负压除尘器600位于所述卸料机构200的下方。
38.所述舟皿500的横截面为半圆形。
39.所述推舟机构300由位于所述输入端110的伺服推舟装置310、满舟储架320和位于所述输出端120的空舟储架330组成,所述伺服推舟装置310位于所述满舟储架320的外侧。所述伺服推舟装置310用于将所述舟皿500从所述满舟储架320上推入所述舟皿夹具210以及将所述舟皿500从所述舟皿夹具210推出到所述空舟储架330上。所述伺服推舟装置310由伺服电机311和伸缩推杆312组成。
40.所述满舟储架320和空舟储架330上均设置有传送带。所述物料传送机构400用于传送掉落在其上方的物料,所述物料传送结构上方设置有传送带。传送带的移动的间歇时间和传送速度都可以根据舟皿夹具210卸料的快慢进行调整和设置,以实现各环节的连续性、稳定性,提高传送效率。
41.还包括控制模块,所述控制模块用于控制所述卸料机构200、推舟机构300、物料传送机构400以及负压除尘器600,所述控制模块采用plc逻辑控制器。
42.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1