容器承载工具和倾倒托板的制作方法
1.本技术公开总体上涉及重型承载工具,并且更具体地涉及用于提升、运输和倾倒大型负载箱等的承载工具和托板。
背景技术:
2.在许多重工业中,希望使用大型箱状容器来接收和临时储存原材料、中间产品或用于稍后处理或随后运送到其他位置的设备。这样的容器可能具有几十公吨或甚至更多的容量,并且通常设有一体式支腿或相关的支架和框架,用于在容器空载和不使用时以及当它们被填充和临时储存材料时将容器支撑在地面或工厂地板上。通常提供重型承载工具来将这种容器从一个地方提升和运输到另一个地方。在一些行业中,这种负载箱设备可以称为中间包(tundish),它可以用来分配和浇注熔融金属。
技术实现要素:
3.在一个方面,本公开描述了一种用于在表面上支撑容器的托板。托板包括底座、第一平台和第二平台。底座由与底座固定的多个支撑件支撑。多个支撑件彼此间隔开并且以与表面间隔开的关系支撑底座。第一平台基本上平行于底座设置并且可旋转地支撑在底座上。在旋转期间,第一平台基本平行于底座。第二平台适于支撑容器。第二平台可枢转地耦接到第一平台以在容器运输位置和容器倾倒位置之间移动。第二平台通过至少一个托板联动装置耦接到第一平台。至少一个托板致动器设置成在容器运输位置和容器倾倒位置之间枢转第二平台。
4.本公开在另一方面描述了一种用于在表面上运输容器并倾倒容器的装置。该装置包括承载工具和适于支撑容器的托板。托板包括底座、第一平台和第二平台。底座由与底座固定的多个支撑件支撑。多个支撑件彼此间隔开并且以与表面间隔开的关系支撑底座。第一平台可旋转地支撑在底座上。第二平台适于支撑容器。第二平台可枢转地耦接到第一平台以在容器运输位置和容器倾倒位置之间移动。第二平台通过至少一个托板联动装置耦接到第一平台。至少一个托板致动器设置成在容器运输位置和容器倾倒位置之间枢转第二平台。承载工具包括拖车、多个圆形接合构件和原动机。承载工具还包括至少一个承载工具致动器,该承载工具致动器适于相对于多个地面接合构件的至少一部分在降低位置和升高支撑位置之间移动拖车。拖车的尺寸设计成可容纳在与底座固定的多个支撑件之间。
附图说明
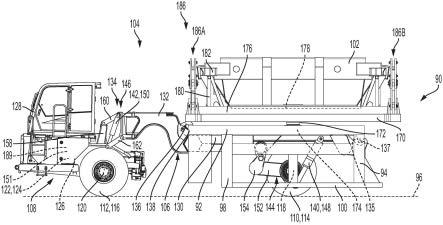
5.图1是根据本公开的教导的运输车、承载工具和倾倒托板的侧视图,承载工具处于升高的运输位置。
6.图2是图1的承载工具和倾倒托板的后视图。
7.图3是图1和图2的运输车、承载工具和倾倒托板的俯视平面图,示出了与承载工具对齐的运输车的驾驶室,并且以虚线示出了运输车的驾驶室相对于承载工具处于转动位
置。
8.图4是图1-3的运输车、承载工具和倾倒托板的侧视图,承载工具处于降低位置以拾取倾卸托盘。
9.图5是图1-4的运输车、承载工具和倾倒托板的侧视图,承载工具处于降低和锁定位置。
10.图6是图1-5的运输车、承载工具和倾倒托板的俯视图,倾倒托板相对于承载工具处于旋转位置。
11.图7是图6的运输车、承载工具和倾倒托板的侧视图,倾倒托板相对于承载工具处于旋转位置,并且以虚线示出用以倾倒支撑在倾倒托板上的容器的托板的一系列位置。
12.图8是根据本公开的教导的运输车、承载工具和倾倒托板的第二实施例的侧视图,承载工具处于升高的运输位置。
13.图9-11是图8的承载工具和倾倒托板的局部侧视图,承载工具处于降低和锁定位置,倾倒托板处于用以倾倒支撑在倾倒托板上的容器的一系列位置。
14.图12是图8-11的承载工具和倾倒托板的局部侧视图,倾倒托板处于完全倾倒位置,其中推动元件伸出。
15.图13是适合与倾倒托板一起使用并且适合与承载工具的实施例一起使用的容器的替代实施例的仰视图。
16.图14是图13的容器的放大的局部等距视图。
17.图15是包括推动组件的倾倒托板的容器支撑装置的替代实施例的局部等距视图。
18.图16-18是图15的倾倒托板的容器支撑装置的滑动门致动装置和图13和14的容器的滑动门组件在一系列位置的局部平面图。
19.图19是图16-18的滑动门致动装置和滑动门组件的局部等距视图。
20.图20是适合与承载工具的实施例一起使用的倾倒托板和支撑的容器的替代实施例的等距视图。
21.图21是图20的倾倒托板的第一平台的等距视图,示出了处于旋转位置的第一平台的平移框架和旋转框架。
22.图22是图21的第一平台的等距视图,示出了平移框架相对于旋转框架处于移位位置。
23.图23是图21和图22的第一平台的分解图。
24.图24是支撑图20的倾倒托板的第一平台的底座的侧视图,第一平台设置在运输位置。
25.图25是图20的倾倒托板的底座和支撑平台的端视图,第一平台设置在运输位置。
26.图26是支撑图20的倾倒托板的第一平台的底座的侧视图,第一平台旋转并平移到倾倒位置。
27.图27是支撑废料容器的图8-12的承载工具的局部侧视图。
28.图28是图27的承载工具和废料容器的局部侧视图,其中废料容器设置在倾倒位置。
具体实施方式
29.参考图1,图示了用于提升和运输以及可选地倾倒大型容器102等的托板(pallet)90,以及用于运输托板90的承载工具(carrier)104。在图1-7的实施例中,图示的容器102通常被称为中间包(tundish),并且通常用于运输熔融金属材料。然而,应当理解,运输的容器102可以是替代类型的容器,或者被用于替代目的。
30.托板90包括由多个支撑件94支撑的底座92,多个支撑件94与底座92固定。多个支撑件94彼此隔开并且以与表面96(在图1中以虚线示出)隔开的关系支撑底座92。在所示实施例中,一对支撑件94沿基座92的任一侧设置。图示的支撑件94是u形的,每个支撑件94包括一对向下延伸的腿98和一个或多个连接腿98的水平支撑元件100。然而,本领域的技术人员将理解支撑件94可具有替代设计。例如,可提供三个、四个或更多个向下延伸的腿98,具有或不具有水平支撑元件100。
31.承载工具104包括拖车106和运输车108,它们支撑在多个地面接合构件110、112上,所述地面接合构件110、112配置成用于沿表面推进承载工具104。例如,在所示实施例中,地面接合构件110、112包括支撑在至少一个承载轴118、120上的多个轮子114、116。也就是说,拖车106以拖车轮114支撑在拖车轴118上的形式被支撑在第一多个地面接合构件110上,而运输车108以运输车轮116支撑在运输车轴120上的形式被支撑在第二多个地面接合构件112上。然而,本领域的技术人员将理解,设想得到替代的支撑布置。例如,拖车106可支撑在分别支撑在一对拖车轴上的两组拖车车轮114上,和/或运输车108可支撑在分别支撑在一对运输车轴上的两组运输车轮116上。
32.承载工具104还包括原动机(prime mover)122,其可以是任何适当的设计。例如,原动机122可以是发动机124并且可通过传动系统(drive train)126耦接到地面接合构件112。在所示实施例中,原动机122与运输车108一起设置。然而,应当理解,原动机122的一部分或全部可替代地设置。
33.承载工具104还可包括可用于承载操作员的驾驶室128。在所示实施例中,驾驶室128与运输车108一起设置,但是在替代实施例中驾驶室可与拖车106一起设置。然而,在替代实施例中,承载工具104可由一个或多个控制器(未示出)在自主操作中远程操作。
34.拖车106包括支撑拖车部分130和向前延伸的附接部分132,附接部分132在牵引件(hitch)134处耦接到运输车108。牵引件134可具有任何合适的设计,优选地允许拖车106相对于运输车108枢转,以便于承载工具104转弯。例如,如图3所示,牵引件134与图示的包括设置在单个拖车轴118上的一组拖车轮114和设置在单个运输车轴120上的一组运输车轮116的地面接合构件110、112相结合,有助于承载工具104转动大致90
°
角。
35.支撑拖车部分130的尺寸设计为容纳在托板90的支撑件94之间,使得支撑拖车部分130可定位在支撑件94之间以允许在数个位置之间运输托板90。为了接合托板90以进行运输,支撑拖车部分130的至少一部分可在降低位置和升高的支撑位置之间移动。参考图4,支撑拖车部分130被示出为相对于托板90处于降低的脱离接合的位置,即,当拖车106移动到与托板接合或脱离接合时,可设置支撑拖车部分130。为了帮助将托板90的底座92相对于支撑拖车部分130保持在适当位置,可提供一个或多个保持器(retainer)136。在所示实施例中,拖车106设置有保持组件,该保持组件包括一个或多个保持器136,该保持器136设置成接收托板90的底座92的前端138。这样,当拖车106的支撑拖车部分130移动到托板90下方
的位置时,托板90的底座92的前端138可被接收在保持器136中(见图5)。本领域技术人员将理解,所示的保持器136不仅可在承载工具104的向前方向上约束底座92,而且如果在向后或侧向的方向上向底座施加力矩(moment)的话,也可在竖直方向上约束底座92。
36.拖车106和托板90可设置有额外的保持结构。例如,在所示实施例中,一个或多个托架(cradle)135设置在支撑拖车部分130的后部附近,并且设置一个或多个协作突起137,该协作突起137从托板90的底座92的下表面延伸。在该实施例中,提供了一对这样的托架135和协作突起137并且彼此间隔开,如图2所示。在操作中,支撑拖车部分130后退到底座92下方的位置,拖车106继续向后直到保持器136接合底座92的前端138并且托架135接合协作突起137。
37.然而,应当理解,可提供替代的或附加的保持器组件。仅作为示例,托板90可设置有一个或多个替代的保持器,该保持器可移动到位以接合拖车106。
38.为了使拖车106的支撑拖车部分130在图5的降低位置和图1的升高支撑位置之间移动,提供了至少一个承载工具致动器140、142。在至少一个实施例中,至少一个承载工具致动器140、142包括至少一个承载工具联动装置144、146,其具有至少一个承载工具液压致动器148、150。当提供至少一个承载工具致动器140、142作为至少一个承载工具液压致动器148、150时,液压可由任何适当的液压源151提供,例如液压流体箱和泵。虽然液压源151与运输车108一起示出,但本领域技术人员将理解,液压源151可设置在任何适当的位置,例如与拖车106一起。
39.在所示实施例中,至少一个承载工具联动装置144将支撑拖车部分130耦接到支撑拖车106的第一多个地面接合构件110,并且至少一个承载工具液压致动器148设置在支撑拖车部分130和第一多个地面接合构件110之间。在图示的实施例中,至少一个承载工具联动装置146和承载工具液压致动器150设置在运输车108和拖车106之间的牵引件134处,如下面将进一步讨论的。
40.可提供任何适当的承载工具联动装置144。承载工具联动装置144可包括例如一端可枢转地耦接在拖车轴118处的第一拖车连杆152和在第一拖车连杆152的相对端处的第二拖车连杆154。第二拖车连杆154的相对端可枢转地耦接到支撑拖车部分130。承载工具液压致动器148的一端可直接或通过第三拖车连杆156耦接到拖车轴118(参见图4和5),而承载工具液压致动器148的另一端耦接到支撑拖车部分130。在所示实施例中,第三拖车连杆156与第一拖车连杆152固定在一起,使得第三拖车连杆156与第一拖车连杆152一起相对于拖车轴118枢转。这样,第一和第三拖车连杆152、156、第二拖车连杆154、承载工具液压致动器148以及承载工具液压致动器148和第二拖车连杆154之间的支撑拖车部分130本身形成四杆连锁(four-bar linkage)。承载工具液压致动器148在缩回位置和伸出位置之间的移动使支撑拖车部分130在图5的降低位置和图1的升高支撑位置之间移动。
41.虽然牵引件134可以是任何适当的设计,但在所示实施例中,牵引件134包括至少一个承载工具联动装置146(其将拖车106耦接到运输车108)和至少一个承载工具液压致动器150。虽然这样的承载工具联动装置146可以是替代设计,但是承载工具联动装置146可包括例如与运输车108固定的第一牵引连杆158,使得运输车108本身用作固定连杆。第二牵引连杆160可枢转地耦接到第一牵引连杆158和拖车106。第三牵引连杆162可枢转地耦接到运输车108和拖车106。第二和第三牵引连杆160、162与拖车106的可枢转耦接是间隔开的,使
得拖车106本身充当四杆承载工具联动装置146中的连接连杆,包含运输车108的四杆承载工具联动装置146通过第一牵引连杆158、第二牵引连杆160、在第二和第三牵引连杆160、162之间的拖车106本身和第三牵引连杆162构成。承载工具联动装置146的位置可由承载工具液压致动器150的位置确定,该承载工具液压致动器150可延伸以将承载工具联动装置146定位在图1的升高支撑位置,并缩回以将承载工具联动装置146定位在图5的降低位置。
42.根据所公开的托板90的特征,支撑的容器102可移动到位置以倾倒容器102的内容物。为了便于倾倒支撑的容器102,托板90还包括第一平台170,第一平台170通过立柱172可旋转地支撑在底座92上。旋转力可通过任何适当的手动或自动机构提供给第一平台170,例如马达、发动机或液压托板致动器(通常显示为174的旋转驱动器)。作为进一步的示例,立柱172可包括驱动元件,该驱动元件延伸穿过底座92以被来自运输车108的驱动器接合。第一平台170可如图1-5所示定位以用于运输托板90,或旋转到图6和7所示位置以倾倒支撑的容器102,如以下将进一步详细解释的那样。本领域技术人员将理解,第一平台170基本平行于底座92,当施加旋转力时,第一平台170同样基本平行于底座92。
43.托板90还包括第二平台176,第二平台176也适于支撑容器102。容器102可至少部分地容纳在第二平台176的上表面中的凹槽(参见178)内。为了允许倾倒支撑的容器102,容器102可通过任何适当的机构进一步固定到第二平台176。例如,在所示实施例中,直立结构180和支撑支架182从第二平台176沿容器102的相对侧延伸以将容器102固定到第二平台176。
44.参考图2和图7,第二平台176在枢轴点184处可枢转地耦接到第一平台170,以便在运输位置(参见图1-3)和倾倒位置(参见在图7中虚线所示的位置)之间移动。应当理解,当第二平台176相对于第一平台170枢转时,保持器136可帮助对底座92施加保持力。这样,在倾倒过程中,底座92和第二平台176与承载工具104保持在一起。
45.为了提供第二平台176相对于第一平台170的枢转运动,托板90还包括耦接第二平台176和第一平台170的至少一个托板联动装置186,以及设置成使第二平台176相对于第一平台170在运输位置和倾倒位置之间枢转的至少一个托板致动器188。在所示实施例中,至少一个托板联动装置186包括沿第二平台176的第一侧设置的第一托板联动装置186a和沿第二平台176的相对侧设置的第二托板联动装置186b。
46.虽然托板联动装置186可以是任何适当的设计,但所示实施例的托板联动装置186包括四杆联动装置。也就是说,托板联动装置186包括第一托板连杆190,该第一托板连杆190在枢轴点192处可枢转地耦接到第一平台170。第二托板连杆194在枢轴点196处耦接到第一托板连杆190。第二托板连杆194进一步在枢轴点198处可枢转地耦接到第二平台176。因此,在该实施例中,四杆联动装置包括第一平台170、第二平台176、第一托板连杆190和第二托板连杆194,第一托板连杆190可枢转地耦接在第一平台170和第二托板连杆194之间,第二托板连杆194可枢转地耦接在第一托板连杆190和第二平台176之间,并且第一和第二平台170、176可枢转地耦接在一起。
47.虽然至少一个托板致动器188可以是任何适当的设计,但所示实施例的托板致动器188是液压托板致动器。此外,虽然可以提供任何合适数量的托板致动器188并且可以将其定位在任何合适的位置,但是在所示实施例中,托板致动器188,即液压托板致动器,被设置在第二平台176的相对侧并且被设置成接合各自的托板联动装置186。更具体地,对于每
个托板联动装置186,托板致动器188可枢转地耦接到第一托板连杆190和第一平台170。也就是说,托板致动器188的一端在枢轴点200处可枢转地耦接到第一平台170,并且托板致动器188的相对端在枢轴点202处耦接到第一托板连杆190。虽然枢轴点202设置在沿第一托板连杆190的中点处,但是应当理解,枢轴点202可以替代地设置,例如更靠近枢轴点196。
48.当使用液压托板致动器188时,液压可由任何适当的液压源189提供,例如液压流体箱和泵。本领域的技术人员将理解,液压源189可以设置在任何适当的位置,例如与运输机108或托板90一起。作为进一步的示例,液压源189可与为一个或多个承载工具液压致动器148和/或承载工具液压致动器150的操作提供的液压源151一致,或者可作为单独的液压系统提供。
49.在图7中,第二平台176和托板联动装置186在倾倒容器102的渐进位置以虚线示出。为了简单起见,托板致动器188未示出在倾倒的渐进位置。然而,应当理解,托板致动器188的远端在枢轴点202处保持可枢转地耦接到第一托板连杆190。因此,随着托板致动器188延伸,托板致动器188使第一托板连杆190相对于第一平台170枢转。第一托板连杆190的枢转导致第二托板连杆194的相关运动,以及第二平台176相对于第一平台170的枢转。类似地,随着托板致动器188缩回,托板致动器188枢转第一托板连杆190,导致第二托板连杆194移动,并且第二平台176枢转回到第一平台170上的位置。本领域技术人员将理解,所示托板联动装置186和托板致动器188在至少一些实施例中允许容器102以至少180
°
的量级枢转,以有助于倾倒容器102的内容物。
50.根据本公开的承载工具210和托板212的替代实施例在图8-12中示出。关于图8-12未具体描述的结构与图1-7中的对应结构相同或相似。与图1-7的实施例一样,承载工具210包括拖车214,拖车214具有向前延伸的附接部分216,该附接部分216通过联动装置220耦接到运输车218。在图8-12的实施例中,液压缸222沿在联动装置220和拖车214的向前延伸的附接部分216之间的任一侧设置,图中仅可见一个这样的液压缸222。拖车214还包括由多个地面接合构件226(这里是车轮)支撑的支撑拖车部分224。
51.托板212包括底座228和多个支撑件230。在所示实施例中,一对支撑件230沿底座228的任一侧设置。为了接合托板212进行运输,支撑拖车部分224的至少一部分可相对于表面231在降低位置和升高的支撑位置之间移动。参考图8,示出承载工具210,其中支撑拖车部分224处于升高的接合位置。参考图9-12,示出承载工具,其中支撑拖车部分224相对于托板212处于降低的接合位置。
52.为了帮助保持底座228相对于拖车214的竖直位置,在底座228的前端234和拖车214之间提供保持器组件232。在该实施例中,保持器组件232包括从拖车214的向前延伸的附接部分216的任一侧横向向外延伸的承载工具坡道垫(carrier ramp pad)236,以及在托板212的底座228的前端234处的协作托板坡道垫(cooperating pallet ramp pad)238。托板坡道垫238由间隔开的向前延伸的臂240支撑,臂240从底座228的前端234延伸。
53.在使用中,操作员将拖车214的支撑拖车部分224后退到位于表面231上的托板212下方的位置。也就是说,支撑拖车部分224在多个支撑件230之间的底座228下方沿着底座228的任一侧向后推进。随着拖车214继续向后,承载工具坡道垫236接合托板坡道垫238以将托板坡道垫238设置为基本上位于承载工具坡道垫236下方。为了便于承载工具坡道垫236和托板坡道垫238之间的接合,坡道垫236、238设置成与支撑拖车部分在底座228下方向
后推进时的移动方向成一定角度。在至少一个实施例中,承载工具坡道垫236可枢转地耦接到向前延伸的附接部分216,使得它们可以围绕轴线242枢转。
54.拖车214和托板212可以设置有额外的保持结构。例如,在所示实施例中,一个或多个托架244设置在支撑拖车部分224的后部附近,并且设置一个或多个协作突起246从托板212的底座228的下表面延伸。
55.为了在图8的升高的支撑位置和图9-12的降低的位置之间移动拖车214的支撑拖车部分224,反之亦然,提供了至少一个承载工具致动器254、256。在图8-12所示的实施例中,与图1-7的实施例相似,即至少一个承载工具致动器254、256包括至少一个承载工具联动装置258、220和至少一个承载工具液压致动器260、262,其以关于图1-7所描述的方式操作。可通过任何适当的液压源264,例如与拖车214相关联的液压流体箱和泵,将液压提供给任何承载工具液压致动器,包括液压致动器222、260、262。虽然液压源264与运输车218一起示出,但本领域技术人员将理解液压源264可以设置在任何适当的位置,例如与拖车214一起。
56.现在回到托板212的结构,托板212还包括第一平台270,该第一平台270由立柱272可旋转地支撑在底座228上。旋转力可以通过任何适当的手动或自动机构提供给第一平台270,例如马达、发动机或液压托板致动器(旋转驱动器通常显示为274)。第一平台270可以如图8所示定位以用于运输托板212,或旋转到图9-12所示的位置以倾倒支撑的容器276,如下文将进一步详细解释的。
57.托板212还包括第二平台278,其适于支撑容器276。容器276可以至少部分地容纳在第二平台278的托架(参见280)内。为了允许倾倒支撑的容器276,容器276可以通过任何适当的机构进一步固定到第二平台278。例如,在所示实施例中,直立结构282和支撑支架284从第二平台278沿容器276的相对侧延伸以将容器276固定到第二平台278。
58.参考图9-12,第二平台278在枢轴点286处可枢转地耦接到第一平台270,以便在运输位置(参见图8)和倾倒位置(参见图9-12)之间移动。应当理解,当第二平台278相对于第一平台270枢转时,保持器组件232可以帮助对底座228施加保持力。这样,在倾倒过程中,底座228和第二平台278与承载工具210保持在一起。
59.为了提供第二平台278相对于第一平台270的枢转运动,托板212还包括耦接第二平台278和第一平台270的至少一个托板联动装置288,以及设置成使第二平台278相对于第一平台270在运输位置和倾卸位置之间枢转的至少一个托板致动器290。虽然托板联动装置288可以是任何适当的设计,但图8-12中所示实施例的托板联动装置288与图1-7的相似之处在于它包括四杆联动装置。也就是说,托板联动装置288包括第一托板连杆292,其在枢轴点294处可枢转地耦接到第一平台270。第二托板连杆296在枢轴点298处耦接到第一托板连杆292。第二托板连杆296在枢轴点300处进一步可枢转地耦接到第二平台278。因此,在该实施例中,四杆联动装置包括第一托板连杆292,第一托板连杆292可枢转地耦接到第二托板连杆296,第二托板连杆296可枢转地耦接到第二平台278,第二平台278可枢转地耦接到第一平台270,第一平台270可枢转地耦接到第一托板连杆292。
60.虽然至少一个托板致动器290可以是任何适当的设计,但所示实施例的托板致动器290是液压托板致动器。托板致动器290的一端在枢轴点302处可枢转地耦接到第一平台270,并且托板致动器290的相对端在枢轴点304处耦接到第一托板连杆292。虽然枢轴点304
设置在沿第一托板连杆292的中点,但是应当理解,枢轴点304可以替代地设置,例如更靠近枢轴点298。当使用一个或多个液压托板致动器290时,液压可由任何适当的液压源提供,例如与液压动力模块266相关的液压流体箱和泵,液压动力模块266与托板212相关联。
61.在图9-11中,第二平台278、托板联动装置288和托板致动器290被图示为处于倾倒容器276的渐进位置。随着托板致动器290延伸,托板致动器290使第一托板连杆292相对于第一平台270枢转。第一托板连杆292的枢转导致第二托板连杆296的相关运动,以及第二平台278相对于第一平台270的枢转。类似地,当托板致动器290缩回时,托板致动器290枢转第一托板连杆292,导致第二托板连杆296移动,并且第二平台278枢转回到第一平台270上的位置。
62.为了便于容器276的内容物的完全倾倒,托板212还可以设置有推动组件306,该推动组件306适于向容器276的内部的一部分提供集中的力。在图示的布置中,容器276设置有可用塞子310封闭的通孔308。推动组件306可以包括适于通过机械运动源314运动的探杆(probe)312。在所示实施例中,推动组件306与第二平台278相关联,探杆312被设置为朝向并穿过通孔308前进以施加力来移出容器276的剩余内容物,如图所示,例如,在图12中。可以提供任何适当的机械运动源314来从通孔308推进和缩回探杆312。仅作为示例,探杆312可以通过液压致动器316前进。这样,探杆312可以联接到与液压致动器316相关联的杆,或者探杆312可以是杆本身。然而,应当理解,可以提供替代装置以向探杆312提供运动,例如机械齿轮装置。此外,虽然通孔308设置在图示的容器276的底壁中并且探杆312设置在底壁的近端,但是应当理解,探杆可设置在相对于容器的替代位置处。例如,如果通孔延伸穿过容器的一侧,则探杆可以靠近容器的一侧设置。另外应当理解,推动装置可以安装成移动到基本上邻近通孔的位置。例如,推动组件306的全部或一部分可以可枢转地安装或可滑动地安装,使得探杆312可相对于通孔推进到用于操作的位置。
63.容器330的替代实施例在图13和14中示出。关于容器330未具体描述的结构可与图1-12中的对应结构相同或相似。图13和14的容器330包括延伸穿过或接近容器330的底表面334的门或通孔332。
64.参考图13-14和16-19,为了选择性地关闭通孔332,滑动门组件336耦接到容器330。滑动门组件336可以包括选择性地可移动的滑动门338,滑动门338通过适当的保持装置耦接到容器330,例如所示的滑动门引导件340和滑动门接收器342。如图14中可见,滑动门引导件340和滑动门接收器342通过任何适当的装置在容器330的底表面334处或靠近底表面334耦接到容器。在所示实施例中,滑动门引导件340在容器330的通孔332下方通过多个耦接器例如螺栓344耦接到容器330。滑动门接收器342通过任何合适的装置例如接收器销346耦接到容器330。
65.滑动门引导件340包括一对凸缘348,以及形成引导通道352的支撑件350。当滑动门338设置在引导通道352内时,滑动门338定位成阻挡通过容器330的通孔332的流动。相反地,当滑动门338没有设置在容器330的通孔332下方的引导通道352内时,通过容器330的通孔332的流动不会被阻挡,因为通过滑动门引导件340的凸缘348之间的空间建立了流动通道。
66.耦接到容器330,滑动门接收器342形成接收通道354。滑动门引导件340的引导通道352和滑动门接收器342的接收通道354基本上彼此相邻设置,形成平移通道356,用于使
滑动门338在引导通道352和接收通道354之间平移,以阻挡或打开容器330的通孔332。也就是说,当滑动门338主要定位在滑动门引导件340的引导通道352内时,容器330的通孔332被滑动门338阻挡。相反地,当滑动门338主要定位在滑动门接收器342的接收通道354内时,容器的通孔332不会被滑动门338阻挡。
67.可提供致动装置以在平移通道356内平移滑动门338。例如,如图14中可见,滑动门接收器342可以包括孔358,杆(未示出)可以通过该孔前进。这种杆可以通过适当的装置前进或缩回,例如液压缸或其他机械装置。
68.在本发明的至少一个实施例中,滑动门致动装置360可以与托板结合提供。图15示出了与图13和14的容器330结合使用的至少一个实施例的托板的容器支撑装置362的局部视图。容器支撑装置362包括第一平台364,第二平台366可枢转地耦接到该第一平台366(图15中仅示出了其一部分)。尽管没有具体说明,但其上支撑容器支撑装置362的托板可以是任何适当的设计,例如结合图1-12中的任何一个所描述的。关于容器、容器支撑装置362和托板的其他方面以及可以运输这种托板的承载工具没有具体讨论的结构可以,例如,关于本公开的其他实施例那样更详细地描述,例如图1-12中的对应结构。
69.在所示实施例中,滑动门致动装置360耦接到第二平台366,但可以提供替代装置。滑动门致动装置360支撑在支架368上或通过支架368支撑,支架368在耦接元件370、372处耦接到第二平台366。支撑支架368通常为t形或y形,但可以提供替代的支撑装置。
70.滑动门致动装置360包括滑动门致动臂374,其在枢轴点376处可枢转地耦接到支撑支架368。滑动门致动臂374的位置由滑动门臂致动器378确定。滑动门臂致动器378可以是任何适当的设计,例如滑动门机构缸380,其可以是液压缸。滑动门机构缸380在第一端382处耦接到支撑支架368,并且在第二端384处耦接到滑动门致动臂374。
71.本领域技术人员将理解,滑动门机构缸380可以延伸或缩回以枢转滑动门致动臂374。参考图16,滑动门338设置在滑动门引导件340的引导通道352内。在使用中,当需要揭开容器330的通孔332时,滑动门机构缸380可延伸以使滑动门致动臂374枢转接合设置在滑动门引导件340的引导通道352内的可选择性移动的滑动门338,并将滑动门338推入滑动门接收器342的接收通道354中,如图17所示。滑动门机构缸380可缩回以使滑动门致动臂374枢转以脱离接合可选择性移动的滑动门338,使滑动门338设置在滑动门接收器342的接收通道354内,如图18所示。
72.由于滑动门338和滑动门致动臂374都不再与容器330的通孔332对齐,推动组件386可用于将容器330的通孔332内的任何残留材料移出。参考图19,例如,探杆388可以通过适当的机械运动源390推进通过通孔332。机械运动源390可以是任何适当的装置,例如齿轮系统(未示出)或液压缸392。当探杆388随后从通孔332缩回时,滑门338可移动到其原始位置,即在滑动门引导件340的引导通道352内,覆盖容器330的通孔332(见图16)。
73.虽然当容器330处于任何位置时滑动门致动装置360可被致动,并且当容器330处于任何位置并且通孔332未被滑动门致动臂374或滑动门338阻挡时可以使用推动组件386,但在至少一个实施例中,滑动门致动装置360可在容器330处于倒置位置(例如图11中所示的容器276的位置)时被致动,并且在倾倒操作期间,推动组件386被致动以使探杆388移出通孔332中的任何残留材料。
74.根据本公开的托板400的另一个替代实施例在图20-25中示出。关于图20-25未具
体描述的结构和可与托板400一起使用的适当承载工具可与图1-19中的对应结构相同或相似。与关于图1-19讨论的实施例一样,托板400包括底座402和多个支撑件404。在所示实施例中,一对支撑件404沿底座402的任一侧设置。
75.托板400还包括容器支撑装置406,其被示为支撑示例性容器408。容器支撑装置406包括第一平台410,第二平台412可枢转地耦接到第一平台410。示例性容器408可通过任何适当的装置支撑在第二平台412上,第二平台412可通过任何适当的装置可枢转地耦接到第一平台410,并且可通过任何适当的装置,例如关于图1-12所示和/或讨论的装置,使第二平台412枢转以倾倒示例性容器408的内容物。
76.为了便于容器408在底座402上的期望或最佳放置,本公开的至少一个实施例包括促进容器支撑装置406相对于底座402旋转和平移的结构。在至少一个实施例中,第一平台410可以包括用于促进第一平台410相对于底座402旋转和平移的结构。最佳如图21中所示,第一平台410包括旋转框架414和平移框架416,容器408被支撑在平移框架416上。
77.旋转框架414被支撑在可旋转地支撑在立柱418上或具有立柱418,立柱418从底座402伸出。在所示实施例中,可通过缸420(参见图24-26)将旋转赋予旋转框架414。然而,应当理解,可通过任何适当的装置将旋转赋予旋转框架414,包括例如关于本公开中的其他托板讨论的装置。在使旋转框架414旋转时,第一平台410、第二平台412和支撑的容器408相对于托板400的底座402旋转。
78.为了调整容器支撑装置406和支撑的容器408的重心位置,平移框架416可相对于旋转框架414移动,平移框架416和旋转框架414包括用于提供这种相对运动的适当结构。在所示实施例中,平移框架416包括空腔或凹槽422,旋转框架414设置在该空腔或凹槽422中。然而,本领域技术人员将理解,可以提供替代结构来促进这种相对运动。例如,平移框架可包括接合旋转框架中的一个或多个开口或凹槽的结构。
79.为了促进这种相对运动,提供了至少一个侧向移动缸(side shift cylinder)424。在至少一个实施例中,提供了一对侧向移动缸424。本领域技术人员将理解,侧向移动缸424的杆426的延伸或缩回使平移框架416相对于旋转框架414的位置偏移。
80.根据所示实施例的另一方面,可提供多个平移滚轮(translation roller)428以促进平移框架416相对于旋转框架414的侧移。在所示实施例中,多个平移滚轮428耦接到平移框架416,并且多个轨道430沿着底座402的表面431设置,这里是底座402的上表面。然而,应当理解,滚轮可以交替地设置在例如底座402的上表面上,使得它们可以选择性地与平移框架416的表面接合。为了本公开的目的,术语“轨道”包括平移滚轮428将在其上滚动的表面。轨道430可以是非平面的,使得它们将平移滚轮428偏置到沿着轨道430的长度的中心位置。
81.在所示实施例中,平移滚轮428可选择性地与轨道430接合。在图示的实施例中,平移框架416相对于旋转框架414的竖直关系同样可以选择性地调整,以在旋转期间提供平移滚轮428与轨道430的选择性脱离接合,以及在平移框架416相对于旋转框架414的移位运动期间提供平移滚轮428与轨道430的接合。
82.为了促进旋转框架414相对于立柱418的轴线旋转,平移框架416和旋转框架414可包括保持平移框架416和旋转框架414之间的相对位置的结构,其中多个平移滚轮428与轨道430脱离接合。在所示实施例中,多个支撑滚轮432沿平移框架416的空腔或凹槽422设置。
为了接合支撑滚轮432,多个支撑臂434沿旋转框架414的周边表面设置。当多个支撑臂434与多个支撑滚轮432(见图21)接合时,平移框架416和旋转框架414的相对位置基本固定。在该位置,平移框架416略微升高,平移滚轮428与轨道430脱离接合。结果,旋转框架414的旋转同样有效地赋予平移框架416。为了增强旋转框架414和平移框架416之间的这种接合,旋转框架414还包括多个加强垫436,这些加强垫436设置成当平移框架416相对于旋转框架414升高时对抗空腔或凹槽422的壁。如此一来,加强垫436与平移框架416的对抗进一步稳固了旋转框架414与平移框架416在转动时的相对位置。
83.相反,为了促进平移框架416相对于旋转框架414平移,侧向移动缸424缩回以使支撑臂434与支撑滚轮432脱离接合(见图22)。该脱离接合允许平移框架416相对于旋转框架414降低,有利于平移滚轮428与轨道430的接合。侧向移动缸424的进一步缩回导致平移框架416相对于旋转框架414移动。随着平移框架416相对于旋转框架414的移动,支撑的容器408同样移动。这种移动不仅可允许容器支撑装置406和支撑的容器408的重心沿着底座402的理想定位,而且还可允许容器支撑装置406和支撑的容器408的理想定位以用于倾倒。
84.图20和24-26中示出了在运输和倾倒过程中容器支撑装置406(以及因此,支撑的容器)的示例性定位。在图20和24-25中,容器支撑装置406和支撑的容器408被图示为处于运输位置。应当注意,平移滚轮428与轨道430脱离接合。如图26所示,为了便于倾倒,旋转框架414和平移框架416可旋转以将容器支撑装置406和支撑的容器408定位成横向于底座402。接着侧向移动缸424可缩回杆426以使支撑臂434与支撑滚轮432脱离接合,相对于旋转框架414降低平移框架416,导致平移滚轮428接合轨道430。随着侧向移动缸424继续缩回杆426,平移框架416和支撑的容器408在底座402上向后移动。然后第二平台412可相对于第一平台410枢转以促进支撑的容器408的内容物的倾倒。在倾倒程序之后,可以执行相反的程序以将容器支撑装置406和支撑的容器408返回到运输位置。
85.还应当理解,承载工具104、210可另外用于运输和倾倒其他类型的容器。如图13和14所示,例如,示出了与废料容器322结合使用的承载工具320,例如承载工具210,的局部视图。图27和28中未示出的承载工具320的那些部分可以是任何适当的设计,例如图8-12的承载工具210中所示的设计。废料容器322包括例如用于接收废料的箱体324。应当理解,箱体324可在其后部打开。箱体324由多个支撑件326支撑。多个支撑件326从箱体324的任一侧向下延伸,并且间隔开,使得承载工具320的支撑拖车部分328可以容纳在支撑件326之间。支撑件326可包括朝向废料容器322后部的坡道或弧形部分331。
86.与图8-12的实施例一样,承载工具320和容器322可设置有适当的保持结构。例如,在所示实施例中,一个或多个托架325设置在支撑拖车部分328的后部附近,并且设置一个或多个协作突起327从箱体324的下表面延伸。
87.应当理解,废料容器322可能不需要被枢转整整180
°
以排出其内容物。承载工具320的平台333在枢轴点337处与支撑拖车部分328可枢转地安装,但是可以提供替代的或附加的枢轴结构。为了向平台333提供枢转力,提供平台致动器339。在所示实施例中,平台致动器339包括液压致动器341,该液压致动器341设置成与平台333的相对于枢轴点337的部分343接合。可通过任何适当的液压源,例如与运输车218相关联的液压流体箱和泵,向液压致动器341提供液压。
88.在所示实施例中,液压致动器341的相对端345、347分别可枢转地耦接到平台333
和从支撑拖车部分328向下延伸的臂349。以这种方式,液压致动器341的延伸或缩回导致平台333相对于支撑拖车部分328的枢转运动以及被支撑的废料容器322的相关枢转运动。以这种方式,如图28所示,废料容器322坐落在表面353上,废料容器322可在支撑件326的弧形部分331上向上滚动,以清空箱体324的内容物。
89.虽然所描述的平台致动器339的特定实施例是液压致动器341,但是本领域技术人员将理解,可提供替代的平台致动器339。仅作为示例,平台致动器339可替代地包括机械致动器,该机械致动器包括齿轮装置。此外,虽然本文讨论的拖车已结合中间包和废料容器进行了描述,但拖车也可用于运输不同类型的容器,例如流体罐。
90.应当理解,前面的描述提供了所公开的系统和技术的示例。然而,预期本公开的其他实施方式可以在细节上与前述示例不同。对本公开或其示例的所有引用旨在引用当时正在讨论的特定示例,并且不旨在更一般地暗示对本公开范围的任何限制。关于某些特征的所有区别和贬低的语言旨在表明对这些特征缺乏偏好,但除非另有说明,否则不将其完全排除在本公开的范围之外。
91.在描述本发明的上下文中(尤其是在所附权利要求的上下文中)使用的术语“一”和“一个”以及“该”和“至少一个”以及类似的指称将被解释为包括单数和复数,除非本文另有说明或与上下文明显矛盾。在一个或多个项目的列表之后使用术语“至少一个”(例如,“a和b中的至少一个”)应解释为表示从所列项目(a或b)中选择的一个项目或从所列项目(a或b)中的两个或多个项目的任何组合,除非本文另有说明或与上下文明显矛盾。
92.除非本文另有说明,否则本文中数值范围的叙述仅旨在用作单独提及落入该范围内的每个单独值的速记方法,并且每个单独的值都包含在说明书中,就好像它在本文中单独引用一样。除非本文另有说明或与上下文明显矛盾,否则本文所述的所有方法都可以以任何合适的顺序执行。
93.因此,本公开包括在适用法律允许的情况下在所附权利要求中记载的主题的所有修改和等同物。此外,除非本文另有说明或与上下文明显矛盾,否则上述要素在其所有可能的变化形式中的任何组合都包含在本公开中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1