成膜装置的制作方法
1.本发明涉及成膜装置。
背景技术:
2.配备有有机el显示器或液晶显示器等平板显示器的显示装置被广泛使用。制造这种平板显示器的成膜装置利用成为成膜对象的基板和设置有规定的图样的掩模进行制造。这时的成膜装置在使掩模的面与基板平行的状态下,在与基板的被成膜面平行的平面内进行基板与掩模的相对位置调整(对准)。并且,在对准完成之后,使基板与掩模的相对距离接近并使两者接触、贴紧。并且,通过经由掩模使成膜材料附着于基板,形成具有所希望的功能的面板。
3.在专利文献1(日本特开2005-248249号公报)中记载了一种串联型的成膜装置,所述串联型的成膜装置使基板与掩模重合并对准,载置于输送用托盘,沿着该输送用托盘的输送路径配置成膜机构,由此,一边输送基板一边进行成膜。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2005-248249号公报
技术实现要素:
7.发明所要解决的课题
8.在专利文献1记载的串联型的成膜装置中,如上所述,在使对准了的基板与掩模重合的状态下,一边输送一边进行成膜。因此,存在着因输送动作的影响而使得基板与掩模的对准会发生偏离的可能性,需要应对。
9.本发明是鉴于上述课题做出的,其目的是提供一种在一边输送基板和掩模一边进行成膜的串联型的成膜装置中,抑制对准了的基板与掩模的位置偏离的技术。
10.解决课题的手段
11.本发明采用以下的结构。即,
12.在一边输送基板一边进行成膜的串联型的成膜装置中,其特征在于,配备有:
13.保持并输送所述基板的基板载置器;
14.具有夹紧所述基板载置器的夹紧部的载置器保持机构;
15.保持掩模的掩模保持机构;
16.在沿着所述基板的被成膜面的平面内,进行对被保持于所述基板载置器的所述基板与所述掩模的相对位置调整的对准机构;
17.在与所述被成膜面相交的交叉方向上,使被保持于所述载置器保持机构的所述基板载置器相对于所述掩模的相对距离变化的移动机构;以及
18.经由所述掩模在被保持于所述基板载置器的所述基板上进行成膜的成膜机构,
19.在所述夹紧部夹紧所述基板载置器,并且,所述基板载置器的整体与所述掩模分
离开的状态下,所述对准机构进行所述相对位置调整,
20.在所述相对位置调整之后,在所述夹紧部夹紧所述基板载置器的状态下,所述移动机构使所述基板载置器与所述掩模接触,
21.在所述基板载置器与所述掩模接触之后,所述夹紧部解除对所述基板载置器的夹紧。
22.发明的效果
23.根据本发明,可以提供一种在一边输送基板和掩模一边进行成膜的串联型的成膜装置中,抑制被对准了的基板与掩模的位置偏离的技术。
附图说明
24.图1是表示实施例的基板载置器的结构的示意图。
25.图2是实施例的串联型制造系统的示意结构图。
26.图3是实施例的对准机构的示意图。
27.图4是表示实施例的基板载置器的反转和向掩模上载置的样子的示意图。
28.图5是表示基板及掩模的保持的样子的俯视图和标记的放大图。
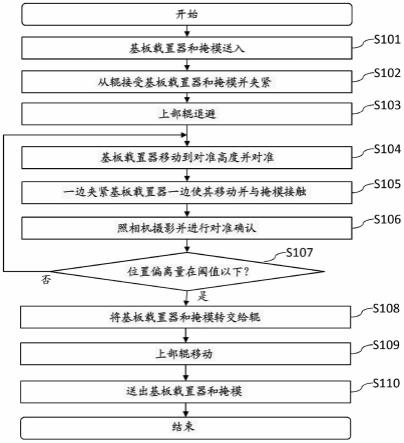
29.图6是表示实施例中的处理的各个工序的流程图。
30.图7是表示实施例中的对准的样子的剖视图。
31.图8是表示实施例中的对准的样子的后续的剖视图。
32.图9是表示实施例中的对准的样子的后续的剖视图。
33.图10是说明电子器件的制造方法的图。
具体实施方式
34.下面,参照附图说明本发明的优选的实施方式。但是,下面的描述只不过是举例表示本发明的优选的结构,本发明的范围并不限于这些结构。另外,对于下面的说明中的装置的硬件结构及软件结构、处理流程、制造条件、尺寸、材质、形状等,只要没有特别说明,则本发明的范围并不限定于此。
35.当在基板上形成所希望的图样的膜时,使用具有适合于膜的形状的掩模图样的掩模。通过使用多个掩模,可以任意地构成被成膜的各个层。为了在基板上的所希望的位置形成膜,有必要精度良好地进行基板与掩模的相对位置调整(对准),另外,有必要没有位置偏离地保持对准了的基板和掩模。
36.本发明涉及将基板与掩模对准的对准装置或者对准方法。另外,本发明涉及采用这样的对准装置或者对准方法的成膜装置或者成膜方法。另外,本发明涉及采用这样的成膜装置或者成膜方法的电子器件的制造装置或者电子器件的制造方法。另外,本发明涉及上述各个装置的控制方法。
37.本发明可以优选地适用于经由掩模在基板的表面上形成所希望的图样的薄膜材料层的情况。作为基板的材料,可以采用玻璃、树脂、金属、硅等任意材料。作为成膜材料,可以采用有机材料、无机材料(金属、金属氧化物)等任意材料。本发明的技术典型地适用于电子器件或光学构件等的制造装置。特别是,适合于有机el显示器或利用该显示器的有机el显示装置、薄膜太阳能电池、有机cmos图像传感器等有机电子器件。但是,本发明的适用对
象并不局限于此。另外,在基板上形成多个层的情况下,将包括直到前一工序为止已经形成的层在内,也被称作“基板”。
38.《实施例1》
39.(载置器结构)
40.参照图1,对于根据本实施例的基板载置器9的结构进行说明。图1(a)是处于保持基板5的保持面朝向上方(纸面的近前方向)的状态的基板载置器9的示意俯视图,图1(b)是图1(a)的a向视剖视图。基板载置器9是在俯视中呈大致矩形的平板状的结构体。基板载置器9具有作为矩形的平板状构件的载置器面板30、多个卡紧构件32、以及多个支承体33。基板载置器9将基板5保持在载置器面板30的保持面31上。
41.下面,为了方便起见,在基板载置器上设定与基板5被保持的位置相对应的基板保持部和包围基板5的外周的外周部来进行说明。在图1(a)中,表示基板5的外缘的虚线为基板保持部与外周部的交界。但是,在基板保护部与外周部之间,也可以没有结构上的不同。
42.构成基板载置器9的矩形外周缘部的四个边之中的对向的两边附近由后面描述的输送辊15支承。基板载置器9以该对向两边的每一个沿着输送方向的姿势被支承。输送辊15由在基板载置器9的输送路径的两侧沿着输送方向配置的多个输送旋转体构成。在基板载置器9被输送辊15支承的状态下,输送辊15旋转,由此,基板载置器9在输送方向上被导向。
43.卡紧构件32是具有与基板5接触并将基板5卡紧的卡紧面的突起。本实施例的卡紧构件32的卡紧面是由粘结性的构件(psc:physical sticky chucking)构成的粘结面,是利用物理性的粘结力或者物理性的吸附力来保持基板5的粘结垫。通过多个卡紧构件32将基板5卡紧,可以沿着载置器面板30的保持面31保持基板5。多个卡紧构件32配置成使得它们各自所具有的卡紧面从载置器面板30的保持面31凸出规定的距离。优选地,卡紧构件32根据掩模6的形状来配置,更优选地,与用于划分掩模6的基板5的被成膜区域的交界部(边框部分)相对应地配置。由此,可以抑制卡紧构件32与基板5接触而影响基板5的成膜区域的温度分布。
44.优选地,卡紧构件32被配置在显示器的有效区域之外。这是因为,存在着由卡紧构件32的吸附引起的应力使基板5产生应变,或者引起成膜时的温度分布的风险。卡紧构件32与基板5的接触面积尽可能地小,保持数尽可能地少为好。另外,由于上述原因,对于成膜而言,卡紧构件32的排列优选为配置在掩模部的背面。
45.为了降低基板载置器9整体的重量,载置器面板30的材质优选以铝或者铝合金作为主材料。
46.当基板载置器9被反转成使得保持基板5的载置器面板30的保持面31朝向下方并且被载置于掩模上时,支承体33相对于掩模6对基板载置器9进行支承。至少在支承体33的附近,通过由支承体33支承基板载置器9,将被保持于基板载置器9的基板5与掩模6分离开。
47.(串联型成膜装置的结构)
48.图2是包括用于制造有机el面板的串联型成膜装置的制造系统300。一般地,经过形成电路元件的电路元件形成工序、在基板上形成有机发光元件的有机发光元件形成工序、在形成的有机发光层上形成保护层的封装工序来制造有机el面板。制造系统300进行有机发光元件形成工序。
49.制造系统300具有掩模送入室90、对准室100(掩模安装室)、多个成膜室110a、
110b、反转室111a、111b、送入室112、掩模分离室113、基板分离室114、载置器输送室115、掩模输送室116、基板送入室117(基板安装室)各个腔室。制造系统300还具有后面将要描述的输送机构,基板载置器9被输送机构沿着通过各个腔室内的规定的输送路径进行输送。
50.具体地,基板载置器9按照基板送入室117、反转室111a、掩模送入室90、对准室100、多个成膜室110a、110b、输送室112、掩模分离室113、反转室111b、基板分离室114、输送室115的顺序在各个腔室内通过并被输送,再次返回基板送入室117。另一方面,掩模6按照掩模送入室90、对准室100、多个成膜室110a、110b、输送室112、掩模分离室113的顺序在各个腔室内通过并被输送,再次返回掩模送入室90。这样,基板载置器9和掩模6分别沿着由虚线和点线所示的规定的输送路径(循环输送路径)循环并被输送。下面,对于各个腔室的功能进行说明。
51.未成膜的基板5从基板送入室117被投入到循环输送路径中,在被保持于基板载置器9的状态下被成膜。之后,已经成膜了的基板5被从基板分离室114送出。被送入到基板送入室117中的未成膜的基板5,首先,在基板送入室117中被安装于基板载置器9,并被保持。此后,在成膜之前,经由反转室111a、掩模送入室90被送入到对准室110中。
52.在反转室111a、111b中,配备有反转机构120a、120b,所述反转机构120a、120b使基板载置器9的基板保持面的朝向从铅垂朝上的方向向铅垂朝下的方向反转,或者,从铅垂朝下的方向向铅垂朝上的方向反转。作为反转机构的反转机构120a、120b可以适当地采用能够把持基板载置器9等并使姿势(朝向)变化的过去已知的机构,省略具体结构的说明。
53.基板5以被成膜面朝向铅垂朝上的方向的状态被送入到基板送入室117中。这时,在基板送入室117内,基板载置器9以保持面朝向铅垂朝上方向的状态配置。从而,被送入的基板5被载置于基板载置器9的保持面之上,由基板载置器9保持。之后,在反转室111a中,利用反转机构120a将保持着基板5的基板载置器9反转,成为基板5的被成膜面朝向铅垂朝下的方向的状态。
54.另一方面,在基板载置器9从掩模分离室113送入到反转室111b中时,在基板5的被成膜面朝向铅垂朝下的方向的状态下被送入。送入后,利用反转机构120b将保持着基板5的基板载置器9反转,基板5的被成膜面成为朝向铅垂朝上的方向的状态。之后,基板5以被成膜面朝向铅垂朝上的方向的状态从基板分离室114被送出。
55.在保持着基板5的状态下被反转了的基板载置器9经由掩模送入室90被送入到对准室100中。与此相应地,掩模6也从掩模送入室90被送入到对准室100中。在对准室100(掩模安装室)中,装载有对准装置1。在对准室100中,对准装置1使载置于基板载置器9的基板5与掩模6高精度对位,将基板载置器9(基板5)载置于掩模6。对于该对准程序,后面将进行描述。
56.之后,将载置了基板载置器9的掩模6转交给输送辊(第二输送机构),开始向下一工序输送。在输送路径的两侧沿着输送方向配置有多个输送辊15,通过输送辊15分别借助图中未示出的ac伺服马达的驱动力旋转,对基板载置器9、掩模6进行输送。
57.在图2中,在成膜室110a、110b中,吸附于被送入的基板载置器9的基板5在蒸镀源7上通过,由此,在基板5的被成膜面上对被掩模6遮挡的部位以外的面成膜。成膜室110能够借助配备有真空泵或室压计的室压控制部(图中未示出)调整室压(腔室内部的压力)。在成膜室110的内部,能够配置收纳有蒸镀材料(成膜材料)的蒸发源50(成膜源、成膜机构),由
此,在腔室内部形成被减压了的成膜空间。在成膜空间中,蒸镀材料从蒸发源50向基板5飞翔,在基板上形成膜。蒸发源50例如可以配备有收容蒸镀材料的坩埚等材料收容部、以及对蒸镀材料进行加热的护套加热器等加热机构。进而,也可以通过配备在与基板载置器9以及掩模6大致平行的平面内使材料收容部移动的机构、或使蒸发源整体移动的机构,使射出蒸镀材料的射出口的位置在腔室4内相对于基板5相对地位移,使得向基板5上的成膜均匀化。
58.在成膜室110a、110b中的成膜完毕之后,基板载置器9到达掩模分离室113,将掩模6分离。分离后的掩模6被向掩模输送室116输送,在新的基板5的成膜工序中使用。另一方面,保持着基板5的基板载置器9在反转室111b中被反转,被向基板分离室114输送。在基板分离室114中,基板5被从基板载置器9分离,被从循环输送路径内回收并送到下一工序。另一方面,基板载置器9被输送给基板送入室117,在新的基板5的输送中使用。
59.(对准结构)
60.图3是表示串联型成膜装置的对准机构的结构的示意的剖视图,对应于图2的bb向视图。对准室100配备有保持被保持于基板载置器9的基板5以及掩模6并进行对准(相对位置调整)的对准装置1。
61.在图示的例子中,对于在成膜时以基板5的成膜面(被成膜面)朝向重力方向下方的状态成膜的上沉积的结构进行说明。但是,也可以是在成膜时以基板5的成膜面朝向重力方向上方的状态成膜的下沉积的结构。在使被保持于基板载置器9的基板5与掩模6相对地接近时,为了将基板载置器9(基板5)与掩模6高精度地对准,可以良好地采用本发明。
62.另外,在本实施例中,如图5所示,掩模6具有数μm~数十μm程度的厚度的掩模箔6b被焊接固定于掩模框架6a上的结构。掩模框架6a以在平面方向(xy方向)上进行拉伸的状态支承掩模箔6b,以便使掩模箔6b不会挠曲。掩模箔6b包括用于划分基板的被成膜区域的交界部。在将掩模6安装于基板5时,掩模箔6b所具有的交界部贴紧基板5,遮蔽成膜材料。另外,掩模6也可以是掩模箔6b只具有交界部的开放掩模,还可以是在交界部以外的部分,即,在对应于基板的被成膜区域的部分,形成有与像素或者副像素相对应的微细的开口的微细掩模。作为基板5,在采用玻璃基板或者在玻璃基板上形成有聚酰亚胺等树脂制的膜的基板的情况下,作为掩模框架6a以及掩模箔6b的主要材料,例如,可以使用铁合金,特别是含有镍的铁合金。
63.图3所示的腔室4优选被保持在减压气氛、真空气氛、或者氮气等不活泼性气体气氛中。在对准装置1中,在腔室4的上部间隔壁上,配置驱动基板载置器9以进行与掩模6的相对位置调整的位置调整机构60(对准机构)。对准装置1在腔室内具有保持基板载置器9的载置器支承部8(载置器保持机构)、保持掩模6的掩模承接台16、以及输送辊15。
64.位置调整机构60被设置于腔室4的上部外侧,使基板载置器9与掩模6的相对位置关系变化,或者稳定地保持该相对位置关系。位置调整机构60概略地包括平面内移动机构11、z升降基座13、以及z升降滑动器10(移动机构)。平面内移动机构11与腔室上部连接,使z升降基座13进行xy移动以及θ旋转。z升降基座13成为基板载置器9在z方向上移动时的基座。z升降滑动器10是在z方向上能够驱动的构件,经由基板保持轴12被连接于腔室内部的基板载置器支承部8。本实施例的对准装置包括与基板载置器9的角部相对应的4个基板保持轴。
65.当平面内移动机构11进行在与基板载置器9(基板5)以及掩模6平行的平面内(即,
与基板5的被成膜面平行的平面内)的xyθ驱动时,z升降基座13、z升降滑动器10以及基板保持轴12成一体地移动,将驱动力传递给载置器支承部8。并且,使基板5在平面内进行xy移动以及θ旋转。作为平面内移动机构,可以采用配备有马达或编码器等的已知的对准机构。
66.当使基板载置器9在z方向(即,与基板5的被成膜面相交的交叉方向)上移动时,通过作为移动机构的z升降滑动器10相对于z升降基座13在z方向上驱动,驱动力经由基板保持轴12被传递给载置器支承部8。由此,基板5相对于掩模6的相对距离发生变化(远离或者接近)。作为z升降滑动器10,可以采用配备有马达或滚珠丝杠、编码器等的已知的驱动机构。另外,上部辊28(第一输送机构)使基板载置器9沿着载置器输送路径移动,输送到对准装置1。上部辊28能够按着对准的进行而在纸面上左右移动,可以向支承基板载置器9的位置移动,或者,从基板载置器9的下方退避。
67.另外,对准装置1并不局限于在xyθ方向及z方向上驱动基板载置器9(基板5)的结构。位置调整机构60也可以只使掩模6移动,或者使基板5和掩模6两者移动。
68.掩模承接台16被连接于支承掩模6的周缘部的掩模z台26。掩模承接台16沿着被载置于掩模台基座19上的升降台导向件34被上下导向并升降。另外,输送辊15被载置于掩模6的输送方向的边的下部,通过掩模承接台16下降,掩模6被从掩模z台26转交给输送辊15。掩模保持构件27通过被图中未示出的促动器驱动,相对于腔室4上下运动,由此,在与掩模z台26之间夹紧掩模6或解除对掩模6的夹紧。将掩模z台26与掩模保持构件27合起来称作保持掩模6的掩模保持机构。
69.基板保持轴12穿过设置于腔室上部的贯通孔,横贯腔室4的外部和内部地设置。在成膜空间内,在基板保持轴12的下部,设置包括承接爪8a和载置器保持构件8b的载置器支承部8,形成为能够保持基板载置器9。载置器保持构件8b被图中未示出的促动器驱动,相对于基板载置器9上下运动,由此,在与承接爪8a之间夹紧基板载置器9或解除对基板载置器9的夹紧。将承接爪8a和载置器保持构件8b合起来称作夹紧基板载置器9的夹紧部。
70.照相机14是对基板5和掩模6进行光学摄影以取得图像的摄影机构。被设置成将设置于基板5及掩模6的对准标记纳入到视野(摄影范围)中。在腔室上部,经由摄影用的透明窗设置照相机14。
71.控制部70控制由对准装置1引起的各种动作(平面内对准、z升降、基板载置器9或掩模6的夹紧/夹紧的解除、蒸镀等)。控制部70例如可以利用具有处理器、内存、存储器、i/o等的计算机构成。在该情况下,通过由处理器执行存储在内存或者存储器中的程序来实现控制部70的功能。作为计算机,可以采用通用的个人计算机,也可以采用置入型的计算机或者plc(programmable logic controller:可编程逻辑控制器)。或者,也可以由asic或fpga这样的电路构成控制器70的功能的一部分或者全部。另外,可以对每个蒸镀装置设置控制部70,也可以由一个控制部70控制多个蒸镀装置。
72.(基板反转和对准的姿势)
73.图4是表示从基板送入室117经由反转室111a、掩模送入室90到对准室100的将基板5安装于基板载置器9,将该基板载置器9反转并向掩模6载置的样子的示意的剖视图。
74.如上所述,基板载置器9具有载置器面板30、卡紧构件32、以及支承体33。载置器面板30构成保持基板5的保持面31。载置器面板30是由金属等构成的板状构件,刚性至少比基板5的刚性高,沿着保持面31保持基板5并抑制基板5的挠曲。在载置器面板30的保持面31的
基板保持区域的外侧,比保持面31及夹紧构件32突出地配置多个支承体33。
75.图4(a)表示基板送入室117的样子。相对于保持面31朝向上方的基板载置器9,基板5从上方下降并被载置于保持面31。
76.从图4(b)到图4(c),表示在反转室111a中的反转的过程。基板载置器9与基板5上下反转。其结果是,基板载置器9变成保持面31朝向下方的姿势,基板5变成被卡紧构件32的保持力从下方贴紧于保持面31且被成膜面朝向下方的状态。
77.图4(d)表示对准室100的样子。当基板载置器9被载置到掩模6上时,支承体33变成比基板5向掩模6侧突出的状态。基板载置器9借助支承体33经过对准动作就位于掩模框架6a的外周框架上。在图示的例子中,至少在支承体33的附近,通过基板5与掩模6分离开,可以提高对准的精度。
78.基板载置器9也可以具有借助磁力经由保持着的基板5吸附掩模6的磁力发生机构。作为磁力发生机构,可以使用永久磁铁或电磁铁、配备有永久磁铁的磁铁板。另外,基板载置器9保持基板的结构并不局限于粘结部,也可以是物理地支承基板的支承部、或静电卡紧机构。
79.(对准的方法)
80.参照图5(a)~图5(c),说明利用照相机14将基板5与掩模6对准的方法。这里,对准装置1配备有4台照相机14(14a~14d)。
81.图5(a)是从上方观察被保持于载置器支承部8的状态的载置器面板30上的基板5的图。为了进行说明,载置器面板30利用虚线以透视的方式表示。在基板5的角部,形成有基板标记37a~37d。4台照相机14a~14d对该基板标记37a~37d进行摄影。控制部70通过图样匹配等从摄影图像中检测出基板标记37,可以取得基板5的位置信息。另外,在载置器面板30上开设有贯通孔,能够从上部利用摄影装置14计测基板标记37的位置。
82.图5(b)是从上面观察掩模框架6a的图。在掩模框架6a的角部,形成有掩模标记38a~38d。4台照相机14a~14d经由基板5对该掩模标记38a~38d进行摄影。控制部70通过从摄影图像中检测出掩模标记38,可以取得掩模6的位置信息。
83.图5(c)是示意地表示在某个照相机14的视野44中的摄影图像的图。由于在视野44中,同时计测掩模标记38以及基板标记37,因此,能够测定标记彼此的相对位置。另外,标记的形状并不局限于该例子。控制部70基于标记彼此的位置关系(距离或角度等),进行基板5与标记6的对准。
84.在要求精度高的对准的情况下,作为照相机14,优选使用具有几μm数量级的高分辨率的高倍率ccd照相机。但是,由于高倍率ccd照相机视野的直径窄到几个mm,因此,在将基板载置器9载置于载置器承接爪时的位置偏离大时,基板标记37脱离视野,变得不能计测。因此,作为照相机14,优选地,与高倍率ccd照相机一起,还一并设置具有大视野的低倍率ccd照相机。在该情况下,利用低倍率ccd照相机进行大致的对准(粗对准),在将掩模标记38和基板标记37同时纳入到高倍率ccd照相机的视野中之后,利用高倍率ccd照相机进行掩模标记38与基板标记37的位置计测,进行高精度的对准(精细对准)。进行粗对准和精细对准时的基板载置器(基板5)与掩模6的相对距离可以相同,也可以不同。
85.作为照相机14,也可以使用ccd照相机以外的摄影装置(例如cmos照相机)。另外,若不分别独立地同时设置高倍率照相机和低倍率照相机,也可以通过使用能够更换高倍率
镜头和低倍率镜头的照相机,或者使用变焦镜头,而由单一的照相机进行高倍率和低倍率的计测。
86.根据由照相机14取得的掩模6的位置信息及基板5的位置信息,可以取得掩模6与基板5的相对位置信息。将该相对位置信息反馈给对准装置的控制部70,对升降滑动器10、平面内移动机构11、载置器支承部8等各自的驱动部的驱动量进行控制来调整相对位置。
87.(对准处理流程)
88.下面,说明在对准室100中,直到将置于基板载置器9上的基板5与掩模6对准并载置到掩模上的处理程序。
89.图6是表示实施例的蒸镀装置的动作程序的流程图。图7~图9是将对准装置1中的各个结构部件的动作与流程相对应地进行表示的示意的剖视图。在图7~图9中,只表示出各个步骤的说明中所需的结构部件。
90.在步骤s101,保持着基板5的基板载置器9、以及掩模6被上部辊28和输送辊15从掩模送入室90经由闸阀送入到对准室100中。如图7(a)所示,在承接爪8a与基板载置器9之间、以及掩模z台26与掩模6之间,具有z方向上的间隙而分离开。
91.在步骤s102,从辊进行转交。如图7(b)所示,承接爪8a上升以支承基板载置器9的外周部,另外,掩模z台26上升以支承掩模外周的掩模框架。进而,载置器保持构件8b下降,在与承接爪8a之间夹紧基板载置器9的外周部,另外,掩模保持构件27下降,在与掩模z台26之间夹紧掩模框架。
92.在步骤s103,如图7(c)所示,上部辊28左右移动,从干扰对准动作的区域退避。
93.在步骤s104,如图8(a)所示,进行基板载置器9(基板5)与掩模6的对准。首先,承接爪8a下降,将基板载置器9移动到对准高度。这时,维持基板保持构件8b的夹紧。在本实施例中,如上所述,利用一并设置低倍率ccd与高倍率ccd的照相机14进行对准。另外,粗对准高度hr和精细对准高度hf相同,例如,基板的被成膜面与掩模的上表面的相对距离h在最近的部分为15mm。另外,在基板载置器9或基板5的中央部因自重而挠曲的情况下,对准高度被设定成挠曲的基板5不会接触掩模6的程度。从而,在对准时,整个基板载置器9(基板5)与掩模6分离开。
94.当基板载置器9移动到对准高度时,照相机14利用低倍率ccd照相机对设置于基板5的基板标记37进行摄影。控制部70对图像进行分析,取得基板5是位置信息,基于该位置信息,驱动位置调整机构60,调整基板5的位置,以使得基板标记37进入到高倍率ccd照相机的视野内。对于掩模6也同样调整成使得掩模标记38进入到高倍率ccd照相机的视野中。
95.接着,照相机14利用高倍率ccd照相机同时对基板5的基板标记37与掩模6的掩模标记38进行摄影。控制部70基于拍摄的图像取得基板5与掩模6的相对位置信息。这里所说得相对位置信息,具体地说,是关于基板标记37与掩模标记38的中心位置彼此的距离和位置偏离的方向的信息。并且,控制部70判定基板5与掩模6的位置偏离量是否在对成膜不产生障碍的规定的阈值以下。在位置偏离量超过规定的阈值的情况下,位置调整机构60使基板载置器9在平面内移动以进行对准。并且,直到位置偏离量变成规定的阈值以下为止,反复进行摄影和位置调整。
96.在本实施例中,在s102中,利用承接爪8a和载置器保持构件8b夹紧基板载置器9。因此,能够尽可能地抑制由对准中的装置动作引起的基板载置器9的位置偏离。
97.另外,s104的对准动作中的照相机14的种类并不局限于上面所述的种类。另外,相对位置调整并不局限于两个阶段的对准,也可以是一个阶段的对准。
98.另外,也可以在进行s104的对准之前,进行基板载置器9的调直以减小由基板载置器9(基板5)在自重引起的挠曲。在该情况下,如图7(b)~图7(c)所示,基板载置器9被夹紧,在上部辊28退避之后,z升降滑动器10使基板载置器9下降,使基板载置器9(基板5)接触掩模6。为了消除挠曲,接触的程度至少为使得基板载置器9(基板5)的下垂部分接触掩模6的程度,更优选地,使基板载置器9(基板5)的整个面紧贴掩模6。通过在该部分接触状态或者贴紧状态下使载置器支承部8解除夹紧,基板载置器9(基板5)沿着掩模6的上表面延伸,消除挠曲。之后,通过载置器支承部8再次进行夹紧,在挠曲解除了的状态下,保持基板载置器9。之后,z升降滑动器10使基板载置器9移动至对准高度。另外,夹紧解除的时刻和基板载置器(基板5)与掩模的接触(贴紧)的时刻也可以有先后。
99.在步骤s105中,如图8(b)所示,使承接爪8a下降,使基板载置器9(基板5)与掩模6接触。在基板载置器9与掩模6接触之后,使载置器保持构件8b上升,解除基板载置器9的夹紧。从而,直到基板载置器9与掩模6接触为止,基板载置器9处于被夹紧的状态,在基板载置器9与掩模6接触之后,基板载置器9的夹紧状态被解除。因此,因接触的冲击而使基板载置器9的位置偏离的可能性变低。
100.并且,在夹紧解除后,通过使承接爪8a进一步下降,使承接爪8a从基板载置器分离开。
101.另外,在使基板载置器9接近掩模6时,优选地,根据基板载置器9与掩模6的相对距离,使移动速度变化。作为一个例子,在对准高度为15mm的情况下,从高度15mm至3mm,以比较高速的第一速度使基板载置器9移动,在从高度3mm至0mm(接触)之间,采用比较低速的第二速度。这是因为,在基板载置器9与掩模6接触的可能性低的期间,通过采用高速的第一速度,移动所需的时间缩短,并且,在基板载置器9与掩模6接近之后,通过采用比第一速度慢的第二速度,防止由接触引起的冲击导致的位置偏离。特别是,在基板载置器9的中央部存在挠曲的情况下,通过在挠曲部分与掩模6接触的范围内采用第二速度,可以提高防止位置偏离的效果。另外,速度变化的阶段数也可以比两个阶段多。另外,也可以使速度连续地变化。
102.在步骤s106,如图8(c)所示,再次利用照相机14对设置于基板载置器9和掩模6的对准标记进行摄影。在步骤s107中,控制部70对摄影图像进行分析,判定基板载置器9与掩模6的对准精度是否满足规定的基准。由此,可以确认在基板载置器9的下降过程中、或者在基板载置器9与掩模6接触时有无位置偏离。
103.在位置偏离量超过阈值的情况下(s106=否),流程返回第二次的s104,再次进行对准。另一方面,在位置偏离量在阈值以下的情况下(s106=是),判定为对准完毕,进入后续的步骤s107。
104.在返回到第二次的s104时,承接爪8a上升,使基板载置器9从掩模6脱离,并且,载置器保持构件8b下降,在与承接爪8a之间夹紧基板载置器9。由此,基板载置器9和掩模6变成与图8(b)同样的位置关系(相对距离),变为能够利用位置调整机构60进行相对位置调整。另外,在该相对位置调整中,也可以代替再次进行照相机摄影,而利用对在s106中摄影的图像进行解析获得的位置偏离量。之后,直到判定为对准完毕为止,反复进行上述的s105
~s107。
105.在步骤s108,如图9(a)所示,解除由掩模保持构件27进行的掩模的夹紧,掩模z台26下降,将载置了基板载置器9的状态下的掩模9转交给输送辊15。这时,也可以再次进行由照相机14实施的摄影和由控制部70实施的对准标记检测,确认最终的对准精度。
106.在步骤s109,如图9(b)所示,作为准备下一次的对准以接受新的基板载置器9的准备,上部辊28从退避位置移动到内侧,载置器保持构件8b上升,确保与承接爪8a之间的距离。
107.在步骤s110,输送辊15将载置有基板载置器9的掩模6从对准室100送出。这时,同时将用于下一次对准的基板载置器9以及掩模6被送入。由此,完成一次的对准。
108.如上所述,根据采用本实施例中记载的对准装置的对准方法,在一边输送基板载置器9(基板5)和掩模6一边进行成膜的串联型的成膜装置的对准时,在基板载置器9被夹紧的状态下,进行平面内的位置调整。并且,在对准后,基板载置器9与掩模接触并被载置,之后,解除基板载置器9的夹紧。从而,能够尽可能地抑制对准后的位置偏离。
109.《实施例2》
110.(有机电子器件的制造方法)
111.在本实施例中,说明利用本发明的成膜装置的有机电子器件的制造方法的一个例子。下面,作为有机电子器件的例子,举例表示有机el显示装置的结构及制造方法。首先,对于所制造的有机el显示装置进行说明。图10(a)表示有机el显示装置60的整体图,图10(b)表示一个像素的截面结构。
112.如图10(a)所示,在有机el显示装置60的显示区域61,呈矩阵状配置有多个像素62,所述像素62具有多个发光元件。发光元件的每一个具有配备有被一对电极夹着的有机层的结构。另外,这里所说的像素是指在显示区域61中能够进行所希望的颜色的显示的最小单位。在本图的有机el显示装置的情况下,像素62由显示相互不同的发光的第一发光元件62r、第二发光元件62g、第三发光元件62b的组合构成。像素62大多由红色发光元件、绿色发光元件和蓝色发光元件的组合构成,但是,也可以是黄色发光元件、青色发光源和白色发光元件的组合,只要是在一种颜色以上,没有特别的限制。
113.图10(b)是图10(a)的a-b线处的局部剖视示意图。像素62在基板10上具有有机el元件,所述有机el元件配备有第一电极(阳极)64、空穴迁移层65、发光层66r、66g、66b中的任一个、电子迁移层67、第二电极(阴极)68。它们之中的空穴迁移层65、发光层66r、66g、66b、电子迁移层67相当于有机层。另外,在本实施方式中,发光层66r是发红色光的有机el层,发光层66g是发绿色光的有机el层,66b是发蓝色光的有机el层。
114.发光层66r、66g、66b形成分别对应于发红色、绿色、蓝色的发光元件(有时也记作有机el元件)的图样。另外,第一电极64按各个发光元件分离地形成。空穴迁移层65、电子迁移层67和第二电极68可以与多个发光元件62r、62g、62b共同地形成,也可以对各个发光元件形成。另外,为了防止第一电极64和第二电极68因异物而短路,在第一电极64间设置有绝缘层69。进而,由于有机el层因水分或氧而劣化,因此,设置有用于保护有机el元件不受水分或氧影响的保护层p。
115.下面,对于作为电子器件的有机el显示装置的制造方法的例子具体地进行说明。首先,准备基板10,所述基板10形成有用于驱动有机el显示装置的电路(图中未示出)以及
第一电极64。
116.接着,通过旋转涂布在形成了第一电极64的基板10上形成丙烯酸树脂,利用光刻法将丙烯酸树脂以在形成了第一电极64的部分处形成开口的方式形成图样,并形成绝缘层。该开口部相当于发光元件实际上发光的发光区域。
117.接着,将绝缘层69被形成图样的基板10送入到第一成膜装置中,利用基板支承单元支承基板,将空穴迁移层65作为共同的层在显示区域的第一电极64上成膜。空穴迁移层65通过真空蒸镀而成膜。实际上,由于空穴迁移层65形成为比显示区域61的尺寸大的尺寸,因此,不需要高精度的掩模。这里,在本步骤中的成膜、或以下的各个层的成膜中所使用的成膜装置为上述各个实施例中的任一个中记载的成膜装置。
118.接着,将形成到了空穴迁移层65的基板10送入到第二成膜装置中,由基板支承单元进行支承。进行基板与掩模的对准,将基板载置到掩模上,在基板10的配置发红色光的元件的部分,对发红色光的发光层66r进行成膜。根据本例,能够使掩模与基板良好地重合,能够进行高精度的成膜。
119.与发光层66r的成膜同样地利用第三成膜装置对发绿色光的发光层66g进行成膜,进而,利用第四成膜装置对发蓝色光的发光层66b进行成膜。发光层66r、66g、66b的成膜完毕之后,利用第五成膜装置在整个显示区域61中对电子迁移层67进行成膜。电子迁移层67对于三种颜色的发光层66r、66g、66b作为共同的层而被形成。
120.将形成到了电子迁移层67的基板移动到溅射装置中,对第二电极68进行成膜,之后,移动到等离子体cvd装置中,对保护层p进行成膜,有机el显示装置60完成。
121.从将绝缘层69形成了图样的基板10送入到成膜装置中起直到保护层p的成膜完毕为止,当暴露在含有水分或氧的气氛中时,存在着由有机el材料构成的发光层因水分或氧而劣化的风险。从而,在本例中,基板在成膜装置之间的送入送出在真空气氛或者不活泼性气体气氛下进行。
122.根据本实施例的成膜装置、电子器件的制造装置、成膜方法或者电子器件的制造方法,抑制基板与掩模的位置偏离,能够进行提高了对准的精度的良好的成膜。
123.附图标记说明
124.5:基板,6:掩模,8:载置器支承部,8a:承接爪,8b:载置器保持构件,9:基板载置器,10:z升降滑动器,26:掩模z台,27:掩模保持构件,50:蒸发源,60:位置调整机构。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1