适用于与手持抛光或砂光动力工具可拆卸附接的板状垫板的制作方法
1.本发明涉及一种适用于与手持抛光或砂光动力工具可拆卸附接的板状垫板。该垫板包括:
[0002]-中心轴线,
[0003]-顶表面,
[0004]-阻尼层,所述阻尼层由弹性塑料材料制成,并附接到顶表面,
[0005]-均匀的底层,所述均匀的底层附接到阻尼层的底表面,并且适用于与抛光或砂光构件可拆卸附接,以及
[0006]-附接构件,所述附接构件设置在顶表面上,并且适用于与手持动力工具的对应附接元件可拆卸附接,特别是手持动力工具的工具轴或偏心元件。
背景技术:
[0007]
上述种类的垫板在现有技术中是众所周知的。已知的垫板具有顶表面,所述顶表面具有围绕中心轴线延伸的圆形中心区域和包围中心区域的基本环形外部区域。通常,在已知的垫板中,中心区域向上突出,超出周围外部区域,并形成中心高地(elevation)。中心区域升高的原因是,其包括垫板的附接构件,通过所述附接构件,垫板以可拆卸的方式附接到动0力工具,特别是抛光机或砂光机。附接构件可以是螺纹销或凹槽的形式,适用于接收并附接到动力工具的对应附接元件。优选地,附接元件固定地附接或形成工具轴的一部分,或者附接到动力工具的偏心元件。优选地,附接元件以可绕垫板的中心轴线自由旋转的方式附接到偏心元件。例如,从ep 2 052 813 a1、ep 3 520 962 a1和wo 2019/048 732 a1中已知此类垫板。
[0008]
如果垫板直接附接到动力工具的工具轴,则其优选地执行纯旋转工作移动。如果垫板通过偏心元件附接到工具轴,则其优选地执行随机轨道工作移动。偏心元件以防扭矩的方式附接到工具轴,以便在动力工具启动时绕工具轴的旋转轴线旋转。垫板以可绕其中心轴线自由旋转的方式附接到偏心元件。工具轴的旋转轴线和垫板的中心轴线平行延伸并彼此保持一定距离。当动力工具启动时,垫板绕工具轴的旋转轴线执行偏心移动。同时,垫板相对于偏心元件的自由旋转将垫板绕中心轴线的随机旋转移动分量添加到偏心移动,从而导致垫板的随机轨道工作移动。
[0009]
在垫板的附接构件呈凹槽形式的情况下,动力工具的附接元件优选地包括突起,所述突起具有外周表面,所述外周表面具有与凹槽的内周表面的形状相对应的形状,使得突起可以在轴向方向上插入凹槽中,并在垂直于中心轴线延伸的平面中以形状配合连接保持在其中。突起的外周形状不一定必须与凹槽的内周形状相同。如果突起的形状使得其可以插入凹槽中并以无间隙的形状配合方式保持在其中,则这就足够了。
[0010]
可以通过机械方式(例如,通过螺钉或螺母)或磁性方式(例如通过相互作用的磁性元件(例如永磁体和/或铁磁性元件))将突起在轴线方向上保持在凹槽中。优选地,突起的外周表面的形状和凹槽的内周表面的形状相对于垫板的中心轴线不是旋转对称的。以这
种方式,在将突起在轴向方向上插入凹槽中之后,它们以防扭矩的方式相对于垫板的中心轴线连接到彼此。为此,如果需要,可以将扭矩从动力工具的工具轴或偏心元件传输到垫板。
[0011]
在垫板的附接构件呈螺纹销形式的情况下,动力工具的附接元件优选地包括螺纹孔,所述螺纹孔具有与螺纹销的外径和螺纹相对应的内径和螺纹。垫板可以通过螺纹连接固定地附接到附接元件。
[0012]
在顶表面的中心区域中具有高地并具有位于该高地中的附接构件的传统垫板的一个缺点是,垫板的重心以及因此的整个移动质量的中心都相当高,即分别与要通过动力工具和抛光或砂光构件进行加工的表面保持相当大的距离。其结果是,在动力工具的预期使用期间,带有附接到其上的垫板和附接到垫板上的抛光或砂光构件的动力工具具有相当不稳定和不均匀的运行,并产生相当大的振动。在偏心元件的情况下,这是通过偏心元件具有一个或多个配重来补偿垫板的重量的事实来强行实施的。由于垫板的中心区域的高地,一方面配重的重心与另一方面垫板的重心间隔开相当大的距离,导致动力工具运行更加不稳定、不均匀,并且振动更大。
[0013]
从上述种类的垫板开始,本发明的一个目的是提供一种垫板,在动力工具的预期使用期间,所述垫板为其附接到其上的动力工具提供更稳定、更均匀的运行。
技术实现要素:
[0014]
为了解决该目的,建议一种具有所附权利要求1的特征的垫板。特别地,从根据上述种类的垫板开始,建议垫板的顶表面具有围绕中心轴线延伸的中心区域和包围中心区域的外部区域,建议中心区域相对于周围外部区域是凹陷的,并且建议附接构件设置在顶表面的凹陷的中心区域中,中心轴线延伸穿过附接构件,并且中心区域的至少一部分包围附接构件。
[0015]
与现有技术的垫板不同,在现有技术的垫板中,中心区域在轴向方向(即,平行于中心轴线)上向上突出超出周围外部区域,在本发明中,中心区域相对于周围外部区域是凹陷的。因此,中心区域在由周围外部区域限定的假想水平面下方延伸。这允许垫板的附接构件在垫板中布置得更低、更深、更靠近垫板的底层。因此,垫板可以布置得更靠近动力工具,从而减少动力工具在轴向方向上的移动质量之间的距离。特别地,偏心元件的配重可以定位得更靠近垫板,优选地,甚至至少部分地位于由凹陷的中心区域在顶表面中形成的凹陷内。这导致一方面配重的重心和另一方面垫板(包括抛光或砂光构件)的重心定位为在轴向方向上更靠近彼此。其结果是,在动力工具的预期使用期间,带有附接到其上的根据本发明的垫板和附接到垫板上的抛光或砂光构件的动力工具具有更稳定和更均匀的运行,并产生更小的振动。
[0016]
与垫板以及附接到其上的抛光或砂光构件的重量相对应的配重布置成相对于动力工具(或动力工具的工具轴)的旋转轴线与垫板的重心相对,以提供质量的静态补偿。为了还提供质量的有效的动态补偿,配重的重心以及垫板的重心布置成应尽可能靠近彼此。如果重心都位于与垫板的中心轴线垂直延伸的共同的水平面上,则理论上可以实现完美的补偿。当然,由于技术限制,这在实践中无法实现。然而,根据本发明的垫板提供了两个重心相对于彼此更靠近的布置,因此,提供了质量的非常好的动态补偿。
[0017]
综上所述,本发明的主要优点如下:
[0018]-配重的重心在轴向方向上移动得更靠近垫板的重心,
[0019]-在动力工具的预期使用期间,移动质量(特别是垫板)的动量减小,
[0020]-动力工具在其预期使用期间的振动较小,
[0021]-降低了垫板和具有附接到其上的垫板的动力工具的总高度。
[0022]
根据本发明的优选实施例,建议垫板的顶表面的周围外部区域从凹陷的中心区域径向向外延伸到垫板的顶表面的上外部边缘。可以在凹陷的中心部分与周围外部区域之间设置锥形中间区域,中间区域从中心区域朝向外部区域上升。优选地,周围外部区域在其整个表面上具有连续的、基本水平的延伸部。虽然周围外部区域可以设置有孔(例如用于吸尘)和/或设置有从表面向上突出的元件(例如加强肋和/或通风叶片),但周围外部区域的延伸部仍然被视为基本上是水平的。换句话说,根据本实施例,从横截面上看,在周围外部区域接触中心区域或锥形中间区域的第一区域中,以及在周围外部区域接触垫板的顶表面的上外部边缘的第二区域中,垫板具有基本相同的高度。
[0023]
根据本发明的另一优选实施例,建议附接构件至少部分地由金属和/或刚性塑料材料制成。金属和/或刚性塑料材料的部分可以延伸到顶表面的凹陷的中心区域中,或甚至形成整个中心区域。特别地,附接构件的扭矩接收和/或传输部件由金属和/或刚性塑料材料制成。例如,它们在设计为凹槽的附接构件中是限定了所述凹槽的内周表面。在设计为螺纹销的附接构件中,销或其基体的紧邻中心区域延伸的至少部分,优选地由金属和/或刚性塑料材料制成。
[0024]
附接构件可以包括:基本板状的锚定或嵌入装置,其具有基本板状的形式,其可以在垫板的阻尼层和/或顶表面内延伸。重要的是,将附接构件固定地附接到整个垫板,以便能够将从动力工具的工具轴或偏心元件接收的扭矩转移到垫板中。尽管附接构件可以从垫板的顶部接近,并且因此被布置在顶表面上,特别是在顶表面的中心区域中,但附接构件也可以延伸穿过垫板的其他部分。
[0025]
根据本发明的优选实施例,建议附接构件包括中心凹槽,并且优选地垫板的顶表面的凹陷的中心区域的至少一部分形成凹槽的上外部边缘。因此,换句话说,凹槽的上外部边缘相对于周围外部区域是凹陷的。
[0026]
根据本发明的优选实施例,建议的是,从垫板的顶表面上方看,中心凹槽具有:内周形状,其包括两个圆弧,所述两个圆弧具有位于中心轴线上的公共中心点和相同的半径,所述两个圆弧定位成相对于中心轴线彼此相对,并且凹槽的内周形状还包括两条直线,所述两条直线在中心轴线的相对侧上平行于彼此延伸,并将两个圆弧彼此互连。优选地,突起形式的动力工具的附接元件具有对应的外周形状,使得突起可以在轴向方向上插入凹槽中,并以形状配合方式保持在其中。
[0027]
根据替代实施例,建议中心凹槽的内周形状包括正多边形,特别是正六边形。优选地,突起形式的动力工具的附接元件具有对应的正多边形外周形状,使得突起可以在轴向方向上插入多边形凹槽中,并以形状配合方式保持在其中。
[0028]
建议中心凹槽至少部分地由外壁形成,所述外壁从垫板的顶表面的凹陷的中心区域向上延伸。在本实施例中,凹槽的上外部边缘不由垫板的顶表面的凹陷的中心区域的任何部分形成。相反,从凹陷的中心区域开始,外壁在向上方向上延伸。这些壁限定了中心凹
槽的内周表面。这些壁还可以部分地延伸到在凹陷的中心区域下方的垫板中。优选地,外壁的顶部边缘位于由垫板的顶表面的周围外部区域限定的假想水平面下方。
[0029]
根据本发明的替代实施例,建议附接构件包括螺纹销,所述螺纹销具有与垫板的中心轴线一致的纵向轴线。凹陷的中心区域优选地紧邻螺纹销的基体延伸。因此,螺纹销的基体相对于由垫板的顶表面的周围外部区域限定的假想水平面是凹陷的。在这种情况下,动力工具的附接元件(附接到工具轴或偏心元件)可以分别包括螺纹孔,所述螺纹孔具有与螺纹销的外径和螺纹相对应的内径和螺纹。
[0030]
垫板可以通过螺纹连接附接到附接元件。优选地,用于拧紧垫板与附接元件之间的螺纹连接的旋转方向与工作移动的方向相反。这将降低动力工具启动时无意中松开螺纹连接的风险。正相反,动力工具的启动将拧紧螺纹连接。
[0031]
建议手持动力工具(特别是手持动力工具的工具轴)的对应附接元件附接到其上的螺纹销的螺纹区域位于由周围外部区域限定的假想水平面下方。在本实施例中,当垫板附接到动力工具时,不仅基体而且(动力工具的附接元件附接到其上的)螺纹销的部分位于假想水平面下方。朝向远端的螺纹销的另一部分也可以位于假想平面下方或不位于假想平面下方。优选地,直至其远端的整个螺纹销位于假想水平面下方。
[0032]
根据又一替代方案,垫板的附接构件可以包括螺纹孔。在这种情况下,动力工具的附接元件将包括螺纹销。附接元件的外径和螺纹与附接构件的内径和螺纹相对应。
[0033]
从上方看,垫板可以具有任何期望的形状。优选地,从垫板的顶表面上方看,垫板具有圆形、三角形(特别是正三角形)或矩形形状。优选地将圆形垫板附接到动力工具,使得其将执行以下工作移动中的一个:纯旋转(直接附接到工具轴)、随机轨道(以绕其中心轴线自由旋转的方式附接到偏心元件)、齿轮驱动(附接到齿轮布置,特别是行星齿轮)或偏心(附接到偏心元件,并且垫板相对于偏心元件绕中心轴线的自由旋转受到限制)。优选地将三角形、正三角形或矩形垫板附接到动力工具,使得其将执行偏心工作移动(附接到偏心元件,并且垫板相对于偏心元件绕中心轴线的自由旋转受到限制)。根据本发明的垫板(其顶表面的中心区域相对于周围外部区域是凹陷的)具有上述优点(即,移动质量的动量减小,并且振动较小),而与垫板的外部形状无关。
[0034]
在圆形垫板的情况下,顶表面的凹陷的中心区域具有基本圆形的形状,并且周围外部区域具有基本环形的形状。
[0035]
根据本发明的优选实施例,从垫板的顶表面上方看,垫板具有圆形形状,并且顶表面包括由刚性材料制成的单独的板状环形覆盖元件,其中优选地,顶表面的环形外部区域的至少一部分(特别是外部区域的邻接抵靠着垫板的顶表面的上外部边缘的至少径向外部部分)由单独的板状环形覆盖元件构成。例如,在ep 1 514 644a1和ep 2 551 056a1中详细描述了这种类型的环形覆盖元件,并且主要用于在垫板中创建额外的吸入室和通道,用于支持垫板的吸尘功能,并以更高的效率去除工作表面上的灰尘和小颗粒。根据本实施例,顶表面的中心区域相对于环形覆盖元件是凹陷的。因此,在由凹陷的中心区域创建的凹槽中设置动力工具的吸尘装置的风扇将是有利的,所述风扇尽可能靠近垫板的吸入室和通道的开口,从而进一步提高吸尘效率。
[0036]
单独的板状环形覆盖元件优选地通过胶合、焊接、共模、卡扣连接、磁性连接、铆接和螺钉连接中的至少一种方式固定地附接到顶表面的其余部分。
附图说明
[0037]
下文参考附图更详细地描述本发明的其他特征和优点。要强调的是,附图中所示和本文所描述的每个特征对于本发明可能是重要的,即使本文没有明确提及。此外,附图中所示和本文所描述的特征可以以任何期望的方式彼此组合,即使该组合未在附图中示出并且未在本文中明确提及。所述附图示出:
[0038]
图1是根据本发明优选实施例的垫板的截面视图,所述垫板直接附接到动力工具的工具轴;
[0039]
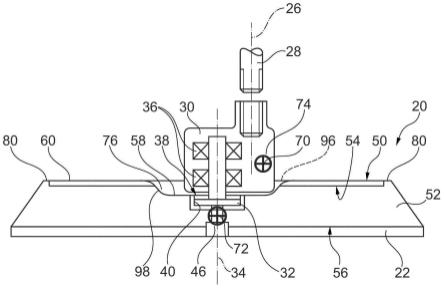
图2是根据本发明优选实施例的垫板的截面视图,所述垫板通过偏心元件间接附接到动力工具的工具轴;
[0040]
图3是以侧视图示出的根据本发明第一实施例的垫板的附接构件的详细视图;
[0041]
图4是图3的附接构件的俯视图;
[0042]
图5是以俯视图示出的根据本发明第二实施例的垫板的附接构件的详细视图;
[0043]
图6是以俯视图示出的根据本发明第三实施例的垫板的附接构件的详细视图;
[0044]
图7是具有附接到其上的根据本发明的垫板的动力工具;
[0045]
图8是通过偏心元件间接附接到动力工具的工具轴的传统垫板在截面视图;以及
[0046]
图9是直接附接到动力工具的工具轴的传统垫板的截面视图。
具体实施方式
[0047]
在图7中,手动和手持马达驱动动力工具的示例用附图标记2整体指定。在这个示例中,动力工具2实现为随机轨道抛光机。然而,动力工具还可以实现为旋转或齿轮驱动抛光机或实现为砂光机,特别是偏心砂光机等。抛光机2具有壳体4,其基本上由塑料材料制成。壳体4具有在其后端处的手柄6和在其前端处的夹持部分8。在其远端处带有电插头的电源线10在手柄6的后端处从壳体4引出。因此,在这个示例中,抛光机2由电动马达用来自主电源的电流驱动。当然,抛光机2也可以通过从抛光机2的内部和/或可拔出的可充电电池引出的电流来操作。替代地,抛光机2可以包括由压缩空气驱动的气动马达,所述压缩空气来自附接到抛光机2的壳体4的用于压缩空气的管。在后两种情况下,电缆10不是必需的,并且可以省略。
[0048]
在手柄6的底侧处,设置开关12,用于打开和关闭动力工具2。开关12可以通过按钮14连续地保持在其启动位置。动力工具2可以设置有速度调节装置16(例如滚花轮),用于调节工具的马达的转速。壳体4可以设置有冷却开口18,用以允许来自位于壳体4内的电子或机械部件和/或电动马达的热量散发到环境中,并允许冷却空气进入壳体4。
[0049]
垫板20以将在下面更详细描述的方式附接到动力工具2。用于加工工作表面(例如,车辆、船只或机身的工作表面,或一块木头、金属、塑料或树脂等的工作表面)的抛光或砂光构件24可以附接到垫板20的底层22(见图8)。例如,抛光构件24可以是泡沫垫、合成或天然羊毛垫、超细纤维垫或皮革垫等。例如,砂光构件24可以是织物砂纸或研磨垫等。抛光或砂光构件24与垫板20的底层22的可拆卸附接可以通过粘合剂连接或钩环连接等方式实现。为此,底层22可以包括钩环连接的第一层(带钩或环),并且抛光或砂光构件24的顶表面可以包括钩环连接的第二层(带环或钩)。当将抛光或砂光构件24放置在底层22上时,带有钩和环的两层彼此进入相互作用中,从而将抛光或砂光构件24以可拆卸的方式附接到垫板
20。
[0050]
垫板20附接到动力工具2,使得其绕动力工具2的工具轴28的旋转轴线26旋转。图8的示例示出了通过偏心元件30间接附接到工具轴28的传统垫板20。与此相反,图9示出了直接附接到工具轴28的传统垫板20。特别地,垫板20附接到附接元件32,所述附接元件可以固定地附接到动力工具2的工具轴28(见图9)或形成工具轴的一部分,或者所述附接元件以可自由旋转的方式附接到偏心元件30(见图8)。
[0051]
如果垫板20直接附接到动力工具2的工具轴28,则其优选地执行纯旋转工作移动。在这种情况下,附接元件32以防扭矩的方式附接到工具轴28,或形成其一体部分。
[0052]
如果垫板20通过偏心元件30附接到工具轴28,则其优选地执行随机轨道工作移动。偏心元件30以防扭矩的方式附接到工具轴28,以便在动力工具2启动时绕工具轴28的旋转轴线26旋转。可以通过螺纹连接或焊接等方式实现附接。垫板20以可绕其中心轴线34自由旋转的方式(例如通过一个或多个轴承36(其可以具有滚珠座圈))附接到偏心元件30。工具轴28的旋转轴线26和垫板20的中心轴线34平行延伸并彼此保持一定距离。当动力工具2启动时,垫板20绕工具轴28的旋转轴线26执行偏心移动。同时,垫板20相对于偏心元件30的自由旋转将垫板20绕中心轴线34的随机旋转移动分量添加到绕旋转轴线26的偏心移动,从而导致垫板20的随机轨道工作移动。
[0053]
从图8可以看出,偏心元件30具有至少一个配重74(图8中偏心元件30的右侧上的较厚的壁),以补偿垫板20在绕旋转轴线26的偏心移动期间的重量。配重74位于偏心元件30的相对于旋转轴线26的一侧上,该旋转轴线与中心轴线34相对,并与垫板20的重心72相对。
[0054]
垫板20包括:在其顶表面50上的附接构件38,垫板通过所述附接构件连接到工具轴28或偏心元件30。在图8和图9的例子中,附接构件38包括具有非旋转对称内周表面42的凹槽40。附接元件32具有对应的外周表面44。特别地,附接构件38和附接元件32设计成使得:附接构件38可以相对于垫板20的中心轴线34以形状配合方式接收附接元件32。为此,如果需要,可以将扭矩从附接元件32传输到垫板20。垫板20和附接构件38可以分别以机械方式(见图9)相对于附接元件32保持在轴向方向(平行于中心轴线34)上,所述机械方式例如是通过螺钉,所述螺钉可以从底部插入垫板20的中心孔46中,并拧入设置在附接元件32的底部处的螺纹孔(未示出)中,并且也可能拧入工具轴28中。替代地,垫板20和附接构件38可以分别以磁性方式(见图8)相对于附接元件32保持在轴向方向上,所述磁性方式例如是通过附接到垫板20的永磁体48,所述永磁体与附接到附接元件32或由附接元件32提供的铁磁性元件相互作用。
[0055]
垫板20包括:
[0056]-中心轴线34,
[0057]-顶表面50,
[0058]-阻尼层52,所述阻尼层由弹性塑料材料制成,并附接到顶表面50,特别是顶表面50的底表面54,
[0059]-均匀的底层22,所述均匀的底层附接到阻尼层52的底表面56,并且适用于抛光或砂光构件24的可拆卸附接,以及
[0060]-附接构件38,所述附接构件设置在顶表面50上,并适用于与手持动力工具2的对应附接元件32可拆卸附接。
[0061]
阻尼层52的弹性塑料材料优选地为聚氨酯(pur)或类似的弹性材料和/或弹性塑料材料。垫板20的各个层50、52和22可以胶合在一起和/或在共模过程中制造。附接构件38优选地通过共模过程插入垫板20中(即,插入顶表面50和阻尼层52中)。
[0062]
上述种类的垫板20在现有技术中是众所周知的。圆形垫板20具有顶表面50,所述顶表面具有围绕中心轴线34延伸的圆形中心区域58和包围中心区域58的基本环形外部区域60。在已知的垫板20中,中心区域58或者向上突出超出周围外部区域28(见图8),或者与周围外部区域28处于同一水平上(见图9)。中心区域58的区域中垫板20的厚度相当大的原因是,其包括垫板20的附接构件38。附接构件38可以是螺纹销或凹槽40的形式,该螺纹销或凹槽适用于接收并附接到动力工具2的对应附接元件32。
[0063]
已知的垫板20的厚度相当大(特别是在中心区域58的区域中)的其他原因可能是设置在阻尼层52中的吸尘通道和腔室62,开口64延伸穿过顶表面50和底层22。
[0064]
传统垫板20具有在顶表面50的中心区域58中的高地或者至少具有与周围外部区域60和位于中心区域58中的附接构件38同一水平的中心区域58的一个缺点是,整个移动质量的重心68位于分别通过动力工具2和抛光或砂光构件24进行加工的表面66上方相当高的位置。此外,配重74的重心70和垫板20的重心72相对于彼此在轴向方向上保持相当大的距离。其结果是,在动力工具2的预期使用期间,动力工具2运行不稳定且不均匀,并产生相当大的振动。
[0065]
根据本发明的垫板2克服了这些缺点,其示例全部或部分在图1至图6中示出。特别地,建议顶表面50的中心区域58相对于周围外部区域60是凹陷的,并且附接构件38设置在凹陷的中心区域58中,中心轴线34延伸穿过附接构件38,并且中心区域58的至少一部分包围附接构件38。优选地,垫板20的顶表面50的凹陷的中心区域58的至少一部分直接邻接抵靠着附接构件38,例如形成凹槽40的上外部边缘或以套环状方式包围螺纹销78的基体。
[0066]
与图8和图9的现有技术的垫板20不同,在现有技术的垫板中,中心区域58在轴向方向(平行于中心轴线34)上突出超出周围外部区域60或与周围外部区域60同一水平,在本发明中,中心区域58相对于周围外部区域60是凹陷的(见图1和图2)。这允许垫板20的附接构件38在垫板20中布置得更低、更深、更靠近底层22。因此,垫板20可以布置得更靠近动力工具2,从而减少动力工具2的移动质量之间的距离。特别地,带有配重74的偏心元件30可以定位得更靠近垫板20的重心72,优选地,甚至至少部分地位于由凹陷的中心区域58在顶表面50中形成的凹陷76内。其结果是,在动力工具2的预期使用期间,带有附接到其上的根据本发明的垫板20和附接到垫板20上的抛光或砂光构件24的动力工具2具有更稳定和更均匀的运行,并产生更小的振动。
[0067]
配重74基本上对应于垫板20的重量,也可能具有附接到垫板上的抛光或砂光构件24的重量。相对于动力工具2的工具轴28的旋转轴线26,配重74布置成与垫板20的重心72相对,以提供质量的静态补偿。为了还提供质量的有效的动态补偿,配重74的重心70以及垫板20的重心72布置成在轴线方向上相对于彼此尽可能靠近。理论上,如果重心70、72位于同一水平面上,则可以实现完美的动态补偿。当然,由于技术限制,这在实践中无法实现。然而,根据本发明的垫板20在轴向方向上提供了两个重心70、72更靠近的布置,因此,提供了质量的非常好的动态补偿。
[0068]
建议垫板20的顶表面50(特别是凹陷76)被设计成使得:如果垫板20通过偏心元件
30间接附接到工具轴28,其可以接收偏心元件30的一部分。这在图2中可见,其中可以清楚地看到,偏心元件30的底部位于凹陷58内,并且位于由周围外部区域60限定的假想水平面96下方。类似地,在垫板20直接附接到工具轴28(见图1)的情况下,工具轴28的紧邻附接元件32的底部位于凹陷76内,并位于假想水平面96下方。
[0069]
如前所述,垫板20的附接构件38可以包括凹槽40(见图1和图2)。在这种情况下,附接元件32优选地由具有外周表面44的突起形成,其形状与凹槽40的内周表面42的形状相对应,使得突起32可以以形状配合方式在轴向方向上插入凹槽40中。如前所述,突起32可以机械地或磁性地在轴向方向上保持在凹槽40中。优选地,突起32的外周表面44和凹槽40的内周表面42相对于垫板20的中心轴线34不是旋转对称的。以这种方式,在将突起32在轴向方向上插入凹槽40中之后,它们以防扭矩的方式相对于垫板20的中心轴线34连接到彼此。为此,如果需要,可以将扭矩从附接元件32传输到垫板20。
[0070]
建议从垫板20的顶表面50(见图5)上方看,中心凹槽40具有内周表面42,所述内周表面包括两个圆弧86,所述两个圆弧具有位于中心轴线34上的公共中心点并具有相同的半径,两个圆弧86定位成彼此相对并相对于中心轴线34保持相同距离。内周表面42还包括两条直线88,所述两条直线在与中心轴线34等距的中心轴线34的相对侧上平行于彼此延伸,并将两个圆弧86彼此互连。突起形式的动力工具2的附接元件32将具有对应的外周表面44,使得突起32可以在轴向方向上插入凹槽40中,并以形状配合方式保持在其中。
[0071]
根据替代实施例(见图6),建议中心凹槽40的内周表面42的形状包括正多边形,特别是正六边形。优选地,突起形式的动力工具2的附接元件32具有对应的正多边形外周形状,使得突起32可以在轴向方向上插入凹槽40中,并以形状配合方式保持在其中。
[0072]
建议中心凹槽40至少部分地由外壁82形成(见图6),所述外壁从垫板20的顶表面50的中心区域58向上延伸。在本实施例中,凹槽40或壁82的上外部边缘分别不由顶表面50的凹陷的中心区域58的任何部分形成。相反,从凹陷的中心区域58开始,壁82在向上方向上延伸。这些壁82限定了中心凹槽40的内周表面42。外壁82还可以部分地延伸到在凹陷的中心区域58下方的垫板20中。优选地,外壁82的顶部边缘位于由顶表面50的周围外部区域60限定的假想水平面96下方。
[0073]
替代地,附接构件38可以包括:螺纹销78(见图3和图4),其具有与垫板20的中心轴线34一致的纵向轴线。在这种情况下,动力工具2的附接元件32包括螺纹孔,所述螺纹孔具有与螺纹销78的外径和螺纹相对应的内径和螺纹。垫板20可以通过螺纹连接附接到附接元件32。从图3可见,如果附接元件32附接到螺纹销78的螺纹区域,则附接元件32至少部分地位于凹陷76内,并且位于由周围外部区域60限定的假想水平面96下方。特别地,螺纹销78的整个螺纹区域位于假想水平面96下方。甚至有可能的是,整个螺纹销78(包括其远端)位于假想水平面96下方。
[0074]
优选地,用于分别拧紧垫板20与螺纹销78之间的螺纹连接以及分别拧紧动力工具2与附接元件32之间的螺纹连接的旋转方向,与旋转工作移动绕工具轴28的旋转轴线26的方向相反。这将降低当动力工具2启动且垫板20加速时无意松开螺纹连接的风险。正相反,动力工具2的启动将拧紧螺纹连接。
[0075]
根据本发明的垫板20的顶表面50的周围外部区域60从凹陷的中心区域58径向向外延伸到顶表面50的上外部边缘80。可以在凹陷的中心部分58与周围外部区域60之间设置
锥形中间区域98,中间区域98从中心区域58朝向外部区域60上升。
[0076]
优选地,周围外部区域60在其整个表面上具有连续的、基本上水平的延伸部。尽管周围外部区域60在其表面上可以设置有孔和/或突出元件(例如加强肋或通风元件等),但在本发明的意义上,仍认为周围外部区域60的延伸部基本上是水平的。换句话说,建议:从横截面上看,在周围外部区域60接触中心区域58或中间区域98的第一区域中,以及在周围外部区域60接触垫板20的顶表面50的上外部边缘80的第二区域中,垫板20具有基本上相同的高度。
[0077]
建议附接构件38至少部分地由金属(例如压铸铝或钢)和/或刚性塑料材料(例如聚氯乙烯(pvc)、聚乙烯(pe)、聚碳酸酯(pc)或树脂(可能是纤维增强的)等)制成。特别地,附接构件38的扭矩接收和/或传输部件由金属和/或刚性塑料材料制成。例如,在设计为凹槽40的附接构件38中,这些是限定凹槽40的内周表面42的周向壁82(见图5和图6)或壁82的一部分。在设计为螺纹销78的附接构件38中(见图3和图4),整个销78、螺纹区域和/或销的基体的紧邻中心区域58延伸的部分优选地由金属和/或刚性塑料材料制成。
[0078]
当然,中心区域58的至少一部分也可以由金属和/或刚性塑料材料制成,优选地与附接构件38(即壁82或螺纹销78)成一件。附接构件38可以包括:锚定或嵌入装置84,其具有基本上板状形状(见图8),其可以延伸到垫板20的阻尼层52内。尽管附接构件38可以从垫板20的顶部接近,并因此被布置在顶表面50中,但附接构件38也可以延伸穿过垫板20的其他部分,例如阻尼层52。
[0079]
图1和图2中所示的垫板20具有圆形形状。通常,其可以具有任何期望的形状。优选地,从垫板20的顶表面50上方看,垫板20具有圆形、三角形、特别是正三角形或矩形形状。优选地将圆形垫板20附接到动力工具2,使得其将执行以下工作移动中的一个:纯旋转(直接附接到工具轴28)、随机轨道(附接到偏心元件30)、齿轮驱动(附接到齿轮布置,特别是行星齿轮)或偏心(附接到偏心元件30,并且垫板20相对于偏心元件30绕其中心轴线34的自由旋转受到限制)。在圆形垫板20的情况下,顶表面50的凹陷的中心区域58具有基本上圆形的形状,并且周围外部区域60具有基本上环形的形状。
[0080]
优选地,将三角形、正三角形或矩形垫板20附接到动力工具2,使得其将执行偏心工作移动(附接到偏心元件30,并且垫板20相对于偏心元件30绕其中心轴线34的自由旋转受到限制)。
[0081]
进一步建议,从垫板20的顶表面50上方看,垫板20具有圆形形状,并且顶表面50包括由刚性材料制成的单独的板状环形覆盖元件90。优选地,顶表面50的环形外部区域60的至少一部分(特别是邻接抵靠着垫板20的顶表面50的上外部边缘80的外部区域60的至少一个径向外部部分)由环形覆盖元件90构成(见图1中的垫板20的左侧部分)。环形覆盖元件90用于在垫板20中创建额外的吸入室和通道92,以支撑垫板20的除尘功能,并以更高的效率去除工作表面66上的灰尘和小颗粒,特别是当垫板20附接到砂光动力工具2时。在这个实施例中,在凹陷76中设置动力工具2的内部吸尘装置的风扇将是有利的,所述风扇尽可能靠近垫板20的吸入室和通道92的开口94,从而进一步提高吸尘效率。
[0082]
单独的板状环形覆盖元件90优选地通过胶合、焊接、共模、卡扣连接、磁性连接、铆接和螺钉连接中的至少一种方式固定地附接到顶表面50的其余部分。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1