一种铣刀自动加工的成型设备及其使用方法与流程
1.本发明涉及铣刀生产的领域,尤其是涉及一种铣刀自动加工的成型设备及其使用方法。
背景技术:
2.目前铣刀是用于铣削加工的、具有一个或多个刀齿的旋转刀具,主要用于在铣床上加工平面、台阶、沟槽、成形表面和切断工件等,因此在如今工业化快速发展的时期,对于铣刀的加工需求量逐渐提高。
3.现有的,对铣刀进行无心磨加工的成型设备包括机架和安装在机架的本体,机架位于本体进料口和出料口位置处均安装有传送带,从原料中切出一段段的金属条原料,通过传送带逐一输送入本体进料口中,完成无心磨加工后,再通过传送带逐一从本体出料口输出,机架位于对应本体出料口的传送带尾端处设置有收集盘,从而无心磨加工完成的原料落在手机盘内进行收集。
4.针对上述中的相关技术,发明人认为存在有无心磨加工完成的金属条原料落在收集盘内时,金属条原料位于收集盘中是散乱的,工人需要进行逐一放置在收集盘中,因此加工效率低。
技术实现要素:
5.为了提高金属条原料的收集整齐程度,进而提高加工效率,本技术提供一种铣刀自动加工的成型设备及其使用方法。
6.第一方面,本技术提供的一种铣刀自动加工的成型设备,采用如下的技术方案:一种铣刀自动加工的成型设备,包括机架和安装在机架的本体,所述机架位于本体的出料口处安装有用于逐一输送金属条原料的传送带,所述机架位于传送带远离本体的一端位置设有滑动架;所述滑动架滑移式安装有收集架,所述传送带的出料口位于收集架的滑动路径正上方,所述收集架开设有若干上方开口的容纳槽;所述传送带的出料口处设有导料筒,所述导料筒的一端连通传送带的出料口、另一端位于容纳槽的槽口正上方;所述滑动架安装有用于驱动收集架中的若干容纳槽依次输送至正对导料筒位置的驱动机构。
7.通过采用上述技术方案,金属条原料在本体内进行无心磨加工后,从传送带输送出,直至金属条原料输送至导料筒,然后进入到导料筒内,经过导料筒滑入到收集架中的容纳槽内;接着通过驱动机构驱动收集架中的下一个容纳槽输送至正对导料筒远离传送带的出料口的一端正下方位置,当下一个金属条原料输送至导料筒后,即可使得该金属条原料落入下一个容纳槽内,从而即可完成对金属条原料整齐收集在收集架中,提高收集整齐程度,进而提高加工效率。
8.优选的,所述收集架包括:若干收集板,所述收集板朝长度方向间隔设置所述容纳槽,若干所述收集板朝收集架的滑动方向排列;所述滑动架位于导料筒正下方位置为卸料位,所述驱动机构包括:用于将若干收集板依次自滑动架的一端移动至另一端的输送组件、
用于驱动位于卸料位的收集板中的容纳槽依次正对导料筒的排料口正下方的上料组件。
9.通过采用上述技术方案,将收集架分出若干块收集板,从而可根据金属条原料的规格调整同一个收集架的收集板规格,进而提高适配性;并且通过输送组件进行逐块输送收集板在滑动架中滑动,并且通过上料组件将滑动至卸料位的收集板中的容纳槽依次正对导料筒的排料口正下方,达到逐个对收集板进行金属条原料收集,无需时刻驱动整个收集架移动,提高输送稳定性和提高使得容纳槽依次正对导料筒的排料口正下方的准确性。
10.优选的,所述输送组件包括:驱动杆、卡接块和第一弹性件,所述滑动架开设有滑移槽,所述收集板的两端设有滑移式安装在滑移槽的滑移块,所述滑动架位于滑移槽正下方位置开设有平行于滑移槽的联动槽;所述驱动杆通过联动槽滑移式安装在滑动架,所述驱动杆设有卡位槽,所述滑移块对应卡位槽的位置开设有卡槽;所述第一弹性件安装于卡位槽的槽底,所述卡接块的一端连接于第一弹性件、另一端延伸出驱动杆外且卡接于卡槽;所述卡接块延伸出驱动杆外的部分且背离收集板滑动方向一侧开设有第一导向面;所述输送组件还包括用于驱动驱动杆滑动的第一驱动件。
11.通过采用上述技术方案,启动第一驱动件,驱动驱动杆在联动槽内滑动,直至使得卡接块的第一导向面抵接在位于滑动架的进料端处且最靠近滑动架的出料端处的一块收集板;继续驱动驱动杆滑动,即可通过第一导向面的作用使得卡接块缩入到卡位槽内,当卡接块移动至正对卡槽位置时,卡接块则通过第一弹性件的作用卡入到卡槽内;接着驱动驱动杆朝滑动架的出料端方向移动时,即可带动该收集板在滑移槽中滑动;而当收集板移动至滑动架的出料端处后,可直接驱动驱动杆朝滑动架的进料端方向滑动,即可通过第一导向面的作用使得卡接块离开该收集板,以进行对下一块位于滑动架的进料端处的收集板输送;该结构仅需要驱动驱动杆在联动槽内来回滑动即可逐块驱动收集板在滑动架上滑动,效率高。
12.优选的,所述上料组件包括:避位台和驱动液缸,所述避位台安装于滑动架且对应卸料位的位置,所述避位台开设有连通于滑移槽的避位槽,所述避位槽朝收集板的容纳槽排列方向延伸;所述驱动液缸安装于滑动架对应卸料位的位置,所述驱动液缸的活塞杆安装有定位块,所述滑移块开设有供定位块卡入的定位槽,所述定位槽在收集板的滑移方向上的两端均连通于滑移槽。
13.通过采用上述技术方案,当输送组件将收集板滑动至卸料位处时,位于驱动液缸的活塞杆中的定位块卡入到定位槽内;然后启动驱动液缸,推动该收集板滑入到避位槽内,即可完成调节位于该收集板中的容纳槽依次正对导料筒;该结构驱动收集板移动的稳定性高,且驱动效率高。
14.优选的,所述收集架还包括:设于若干收集板两侧的提手、安装于所述提手且对应若干收集板位置的插接杆,所述收集板均设有供插接杆插入的插接槽;所述收集板设有用于使插接杆稳定在插接槽内的限位组件。
15.通过采用上述技术方案,当将同一收集架中的收集板放置在滑动架的进料端位置后,通过限位组件松开对插接杆的束缚,然后即可拉动提手,使得各收集板处于可分离的状态;当属于同一收集架的收集板均滑动至滑动架的出料端时,可通过提手中插接杆插入到插接槽内,再通过限位组件将插接杆稳定在插接槽内,使得工人便于将整个收集架进行搬运。
16.优选的,所述限位组件包括:锁位块,所述收集板对应插接槽的位置均设有安装槽,所述锁位块滑移式安装在安装槽内,所述锁位块的一端延伸入插接槽、另一端朝竖直方向延伸出收集板,所述插接杆设有供锁位块延伸入插接槽的一端卡入的锁位孔;所述锁位块对应插接槽的槽口一侧设有第二导向面。
17.通过采用上述技术方案,当插接杆插入到插接槽的过程中,通过第二导向面的导向作用,使得锁位块先滑离插接槽,当插接杆插入至锁位孔正对锁位块位置时,锁位块通过自身重力,即可使得锁位块通过自身重力卡入到锁位孔内,进而完成对插接杆锁定;当需要松开对插接杆的束缚时,则只需要拉动锁位块延伸出收集板外的一端,使得锁位块离开锁位孔位置;该结构操作简单,组装效率高。
18.优选的,所述滑动架位于出料端位置的两侧设有盛物箱,所述盛物箱内朝竖直方向叠放所述提手,所述盛物箱靠近箱底且对应插接槽的位置设有推离口,所述盛物箱设有用于将位于最底部的所述提手朝收集板的方向推动的第二驱动件。
19.通过采用上述技术方案,工人在滑动架进料端处拆出的提手放入到对应的盛物箱中,当同一收集架的收集板均输送至滑动架出料端处时,则启动第二驱动件,将位于盛物箱内最底部的一个提手从推离口推出,并朝收集板的方向移动,直至使得该把手上的插接杆插入到各插接槽内,即可完成对收集架的组装,工人只需要在滑动架出料端处通过提手即可完成卸料,提升了工作效率,提高了工人的操作便利性。
20.第二方面,本技术提供的一种使用方法,采用如下的技术方案:一种使用方法,基于所述铣刀自动加工的成型设备,所述方法包括:获取滑动架进料端处的收集板数量信息和收集板厚度信息;根据所述收集板数量信息和所述收集板厚度信息,计算出驱动杆的移动距离,根据所述移动距离,触发收集板输送指令,以将位于最靠近滑动架出料端的收集板输送至卸料位;获取导料筒中的红外信号信息,根据所述红外信号信息,判断是否有金属条原料落入对应的容纳槽;若是,则获取相邻容纳槽之间的间距信息,根据所述间距信息,触发收集板位置调节指令,以将收集板上的容纳槽依次对应导料筒;获取收集板的位置调节次数信息和单个收集板的容纳槽数量信息,将所述位置调节次数信息和所述容纳槽数量信息进行对比,判断位置调节次数是否等于容纳槽数量信息;若等于,则触发收集板回收指令,以将收集板输送至滑动架的出料端。
21.通过采用上述技术方案,工人将空的收集架放置在滑动架的进料端处,并且使得收集架背离滑动架的出料端的一侧调整至对应初始位置,然后将该收集架的收集板数量和单块收集架的厚度输入到终端,从而可根据收集板数量和单块收集架的厚度,计算出驱动杆自卸料位到达收集架位于最靠近滑动架的进料端的一块收集板处的移动距离,接着触发收集板输送指令,以将位于最靠近滑动架出料端的收集板输送至卸料位;该过程工人仅需要进行简单的操作,即可使得单块收集板准确地输送至卸料位,效率高。
22.为了更加迅速地判断是否有金属条原料落入对应的容纳槽,则直接通过金属条原料经过导料筒时产生的红外信号进行判断;当判定有金属条原料落入对应的容纳槽后,则
根据工人预先输入到终端的相邻容纳槽之间的间距信息,触发收集板位置调节指令,以将收集板上的容纳槽依次对应导料筒,从而即可完成单块收集板进行金属条原料收集。
23.每触发一次收集板位置调节指令即计算一次收集板的位置调节次数,则当收集板的位置调节次数等于工人预先输入到终端的单个收集板的容纳槽数量时,即说明该收集板完成金属条原料收集,进而触发收集板回收指令,以将收集板输送至滑动架的出料端,提高了加工效率。
24.优选的,在所述触发收集板位置调节指令过程中,所述方法还包括:获取预设定的间隔时间信息,判断在预设定的间隔时间内是否有金属条原料落入对应导料筒位置的容纳槽;若否,则触发同组收集板组合指令,以将位于卸料位和位于滑动架进料端处的同组收集板输送至滑动架出料端。
25.通过采用上述技术方案,若判定在预设定的间隔时间内没有金属条原料落入对应导料筒位置的容纳槽,则说明同批次金属条原料完成加工;虽然该收集板对应的收集架未收集满金属条原料,但是为了对该收集架中该批次的金属条原料进行后续加工,则触发同组收集板组合指令,以将位于卸料位和位于滑动架进料端处的同组收集板输送至滑动架出料端,以更加快速地完成该批次的金属条原料加工,提高加工效率。
26.优选的,在所述若等于,则触发收集板回收指令,以将收集板输送至滑动架出料端之后,所述方法还包括:获取收集板回收指令的触发次数信息,根据所述触发次数信息和预设定的同组收集板数量信息,判断触发次数是否等于预设定的同组收集板数量;若等于,则触发收集架组装指令,以将位于滑动架出料端的同组收集板组装成收集架。
27.通过采用上述技术方案,每触发一次收集板回收指令即计算一次触发次数,则当触发次数等于工人预先输入到终端的同个收集架的收集板数量时,说明同个收集架的收集板集齐,进而触发收集架组装指令,以将位于滑动架出料端的同组收集板组装成收集架,便于工人将整个收集架搬至下一个加工工位处。
28.综上所述,本技术包括以下至少一种有益技术效果:1.金属条原料在本体内进行无心磨加工后,从传送带输送出,直至金属条原料输送至导料筒,然后进入到导料筒内,经过导料筒滑入到收集架中的容纳槽内;接着通过驱动机构驱动收集架中的下一个容纳槽输送至正对导料筒远离传送带的出料口的一端正下方位置,当下一个金属条原料输送至导料筒后,即可使得该金属条原料落入下一个容纳槽内,从而即可完成对金属条原料整齐收集在收集架中,提高收集整齐程度,进而提高加工效率;2.仅需要驱动驱动杆在联动槽内来回滑动即可逐块驱动收集板在滑动架上滑动,效率高;3.工人在滑动架进料端处拆出的提手放入到对应的盛物箱中,当同一收集架的收集板均输送至滑动架出料端处时,则启动第二驱动件,将位于盛物箱内最底部的一个提手从推离口推出,并朝收集板的方向移动,直至使得该把手上的插接杆插入到各插接槽内,即可完成对收集架的组装,工人只需要在滑动架出料端处通过提手即可完成卸料,提升了工作效率,提高了工人的操作便利性。
附图说明
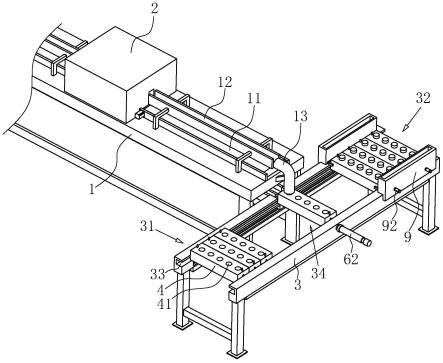
29.图1是本技术的整体结构示意图。
30.图2是本技术的滑动架中结构示意图。
31.图3是本技术的卸料位处结构剖视图。
32.图4是本技术的输送组件结构剖视图。
33.图5是本技术的滑动架的出料端结构剖视图。
34.图6是本技术的收集架结构示意图。
35.图7是图5中a的局部放大图。
36.图8是本技术一实施例中使用方法的一流程图。
37.图9是本技术一实施例中使用方法中在触发收集板位置调节指令过程中的流程图。
38.图10是本技术一实施例中使用方法中步骤s60之后的流程图。
39.附图标记说明:1、机架;11、传送带;12、挡板;13、导料筒;2、本体;3、滑动架;31、进料端;32、出料端;33、滑移槽;34、卸料位;35、联动槽;4、收集板;41、容纳槽;42、滑移块;421、卡槽;422、定位槽;43、插接槽;44、安装槽;45、锁位块;451、第二导向面;46、固定环;47、第二弹性件;48、限位槽;5、输送组件;51、驱动杆;511、卡位槽;52、卡接块;521、第一导向面;53、第一弹性件;54、第一驱动件;6、上料组件;61、避位台;611、避位槽;62、驱动液缸;621、定位块;7、提手;8、插接杆;81、锁位孔;9、盛物箱;91、推离口;92、第二驱动件。
具体实施方式
40.以下结合附图1-10对本技术作进一步详细说明。
41.本技术实施例公开一种铣刀自动加工的成型设备。参照图1,成型设备包括机架1和本体2,本体2固定安装在机架1,机架1对应本体2的出料口位置固定安装有传送带11,传送带11远离本体2的一端朝水平方向延伸至靠近机架1边缘的位置;传送带11的正上方设有一对挡板12,两块挡板12相对设置,挡板12均固定安装在机架1,挡板12朝传送带11的长度方向延伸,两块挡板12之间的间距仅供一个金属条原料输送,从而无心磨加工完成的金属条原料从本体2的出料口输送出后,金属条原料通过两块挡板12的抵挡作用,使得金属条原料朝自身长度方向输送。
42.机架1位于传送带11的出料口位置处固定安装有导料筒13,导料筒13的一端与两块挡板12之间的位置相连通,即导料筒13与传送带11的出料口连通,导料筒13的另一端延伸出机架1且开口朝下,从而金属条原料从传送带11的出料口输送出后,金属条原料可滑入到导料筒13内,经过导料筒13的导向作用,使得金属条原料从呈水平方向转变为呈竖直方向;导料筒13开口朝下的一端位置设置有红外传感器,用于检测是否有金属条原料经过导料筒13。
43.参照图2和图3,机架1位于传送带11远离本体2的一端位置设有滑动架3,滑动架3朝垂直于传送带11的长度方向水平延伸,滑动架3的一端为进料端31、另一端为出料端32;滑动架3开设有一对滑移槽33,滑移槽33朝滑动架3的长度方向延伸出滑动架3外,两条滑移槽33相对设置。
44.滑动架3位于两条滑移槽33之间的位置安装有收集架,收集架包括若干收集板4,在本实施例中,每个收集架包括四块收集板4,四块收集板4朝滑移槽33的长度方向排列,每块收集板4的顶部位置开设有上方开口的多个容纳槽41,多个容纳槽41朝垂直于滑移槽33的方向水平排列设置,收集板4的两端且靠近底部的位置均固定安装有滑移块42,滑移块42的厚度与收集板4的厚度相等,滑移块42滑移式安装在滑移槽33;收集板4在滑动架3的滑动路径位于导料筒13开口朝下的一端正下方,滑动架3位于导料筒13正下方位置为卸料位34;当收集板4滑动至卸料位34时,金属条原料转变为呈竖直方向后落入容纳槽41内完成收集。
45.参照图3和图4,滑动架3安装有驱动机构,驱动机构包括用于将若干收集板4依次自滑动架3的一端移动至另一端的输送组件5,输送组件5包括驱动杆51、卡接块52、第一弹性件53和第一驱动件54,滑动架3位于每条滑移槽33的正下方位置均开设有平行于滑移槽33的联动槽35,每个联动槽35内均设置输送组件5,驱动杆51通过联动槽35滑移式安装在滑动架3;驱动杆51竖直朝上的一侧中间位置开设有卡位槽511,每个滑移块42竖直朝下的一侧中间位置均开设有用于与卡位槽511相对应的卡槽421;卡接块52的一端滑移式安装在卡位槽511、另一端朝竖直向上延伸出驱动杆51外且卡接于卡槽421,卡接块52延伸出驱动杆51的部分且背离收集板4滑动方向一侧开设有第一导向面521;第一弹性件53为弹簧,第一弹性件53的一端固定安装在卡位槽511的槽底、另一端固定安装在卡接块52位于卡位槽511内的一端;第一驱动件54为无杆气缸,第一驱动件54固定安装在滑动架3,第一驱动件54的滑动座与驱动杆51固定连接。
46.第一驱动件54驱使驱动杆51滑动至位于滑动架3的进料端31处且最靠近滑动架3的出料端32的一块收集板4位置时,通过第一导向面521使得卡接块52卡入到该收集板4的卡槽421内;再通过第一驱动件54驱使驱动杆51朝滑动架3的出料端32一侧滑动时,即可带动收集板4滑动;而当该收集板4滑动至滑动架3的出料端32后,第一驱动件54驱使驱动杆51朝滑动架3的进料端31方向移动,即可通过第一导向面521的导向作用,使得卡接块52离开该收集板4的卡槽421。
47.参照图3,驱动机构还包括用于驱动位于卸料位34的收集板4中的容纳槽41依次正对导料筒13的上料组件6,上料组件6包括避位台61和驱动液缸62,避位台61和驱动液缸62分别设置在滑动架3对应卸料位34的位置两侧,避位台61的一端固定安装在滑动架3、另一端朝垂直于滑移槽33的方向水平延伸,避位台61朝上的一侧开设有避位槽611,避位槽611同时与两条滑移槽33对应卸料位34的位置相连通,避位槽611的宽度等于收集板4的厚度,从而位于卸料位34处的收集板4可从两条滑移槽33之间位置滑入到避位槽611内;卡槽421均连通出滑移块42在避位槽611的长度方向上的两端;驱动液缸62固定安装在滑动架3,驱动液缸62的活塞杆朝避位槽611的长度方向伸缩,驱动液缸62的活塞杆的端部固定安装有定位块621,定位块621朝竖直方向延伸,收集板4靠近驱动液缸62一侧的卡接块52开设有定位槽422,定位槽422在收集板4的滑移方向上的两端均连通于滑移槽33,定位块621位于滑移槽33内,并且定位块621与定位槽422处于同一直线上。
48.当收集板4滑动至卸料位34时,定位块621卡入到定位槽422内;启动驱动液缸62,即可推动该收集板4滑入或滑出避位槽611,进而使得该收集板4上的容纳槽41依次正对导料筒13;当每个容纳槽41均插接有金属条原料后,则将收集板4重新滑动至两条滑移槽33之间,再通过驱动杆51的滑动,即可带动收集板4滑动至滑动架3出料端32。
49.参照图5和图6,收集架还包括提手7和插接杆8,提手7设有一对,两个提手7分别位于四块收集板4的两侧位置;每个提手7均间隔固定安装有四个插接杆8,四个插接杆8朝四块收集板4的排列方向间隔设置;每块收集板4对应插接杆8的位置开设有插接槽43,插接杆8插接于插接槽43。
50.参照图5和图7,每块收集板4设有用于使插接杆8稳定在插接槽43内的限位组件,限位组件包括锁位块45、固定环46和第二弹性件47,每块收集板4对应插接槽43的位置均开设有安装槽44,安装槽44朝竖直方向延伸,插接杆8对应安装槽44的位置开设有锁位孔81;锁位块45通过安装槽44滑移式安装在收集板4,锁位块45的一端延伸入插接槽43且卡入锁位孔81、另一端延伸出收集板4外;收集板4位于安装槽44的槽壁位置开设有限位槽48,固定环46套设于锁位块45,固定环46与锁位块45固定连接;第二弹性件47为弹簧,第二弹性件47套设于锁位块45,第二弹性件47的一端固定安装在固定环46、另一端固定安装在容纳槽41的端部,从而可使得插接杆8稳定在插接槽43。
51.更具体的,锁位块45对应插接槽43的槽口一侧开设有第二导向面451,从而通过直接将插接杆8插入插接槽43内,即可使得锁位块45插入到锁位孔81。
52.参照图5和图7,滑动架3位于出料端32位置的两侧均固定安装有盛物箱9,盛物箱9的上方开口,盛物箱9内朝竖直方向方向堆叠有提手7,并且提手7中的插接杆8朝向收集板4;盛物箱9靠近箱底且对应插接槽43的位置开设有推离口91;盛物箱9远离收集板4的一侧固定安装有第二驱动件92,第二驱动件92为气缸,第二驱动件92的活塞杆延伸入盛物箱9内且正对位于最底部的提手7,从而即可将位于最底部的提手7从推离口91推出,再使得插接杆8卡入到插接槽43内。
53.本技术实施例一种铣刀自动加工的成型设备的实施原理为:将同一收集架的收集板4从滑动架3的出料端32处滑入,然后启动第一驱动件54,驱使驱动杆51移动至位于滑动架3的进料端31处且最靠近滑动架3的出料端32的一块收集板4位置,使得卡接块52卡入到卡槽421内;再通过驱使驱动杆51朝滑动架3的出料端32方向滑动,直至使得该收集板4移动至卸料位34处。
54.金属条原料在本体2内进行无心磨加工后,从传送带11输送出,直至金属条原料输送至导料筒13,然后进入到导料筒13内,经过导料筒13滑入到该收集板4中其中一端的一个容纳槽41内;接着通过启动驱动液缸62,推动该收集板4滑入到避位槽611内,并且使得收集架中的下一个容纳槽41输送至正对导料筒13正下方位置,当下一个金属条原料输送至导料筒13后,即可使得该金属条原料落入下一个容纳槽41内,从而即可完成对金属条原料整齐收集在该收集板4中。
55.接着将该收集板4滑回到卸料位34中,再驱使驱动杆51朝滑动架3的出料端32方向继续滑动,直至使得该收集板4移动至滑动架3的出料端32;最后再通过上述步骤将整个收集架中的容纳槽41收集金属条原料。
56.当同一收集架的收集板4均移动至滑动架3的出料端32后,启动第二驱动件92,使得位于盛物箱9内最底部的提手7推离盛物箱9,直至使插接杆8插入到插接槽43内,使得各收集板4连接。
57.在本技术实施例还公开一种使用方法,参照图8,具体包括如下步骤:s10:获取滑动架进料端处的收集板数量信息和收集板厚度信息。
58.具体的,首先驱动杆初始位于卸料位处,工人将空的收集架放置在滑动架的进料端处,并且使得收集架背离滑动架的出料端的一侧调整至对应初始位置,在本实施例中,对应初始位置是指驱动杆移动至滑动架进料端的端部位置时,卡接块所在的位置;接着将该收集架的收集板数量和单块收集架的厚度输入到终端,从而即可获取滑动架进料端处的收集板数量信息和收集板厚度信息,为后续计算驱动杆的移动距离做准备,操作简便。
59.s20:根据收集板数量信息和收集板厚度信息,计算出驱动杆的移动距离,根据移动距离,触发收集板输送指令,以将位于最靠近滑动架出料端的收集板输送至卸料位。
60.具体的,当获取到滑动架进料端处的收集板数量信息和收集板厚度信息后,根据对应初始位置与卸料位之间的距离,计算出驱动杆的移动距离,例如:对应初始位置与卸料位之间的距离为100cm,收集板数量为4,收集板厚度为10cm,则驱动杆的移动距离为100-(4
×
10-5)=65cm;从而触发收集板输送指令,先将驱动杆朝滑动架进料端方向移动至卡接块正对最靠近滑动架出料端的一块收集板中的卡槽,然后再将驱动杆朝滑动架出料端方向移动相同的移动距离,即可使得该收集板移动至卸料位;当驱动下一块收集板移动时,则将上一块收集板的移动距离加上一块收集板厚度即为下一次的移动距离;从而使得驱使驱动杆得移动距离更加准确,提高对收集板的移动效率。
61.s30:获取导料筒中的红外信号信息,根据红外信号信息,判断是否有金属条原料落入对应的容纳槽。
62.具体的,通过设置在导料筒中的红外传感器,获取导料筒中的红外信号信息,根据判断是否有接收到红外信号,进而判断是否有金属条原料落入对应的容纳槽,检测准确性和效率高。
63.s40:若是,则获取相邻容纳槽之间的间距信息,根据间距信息,触发收集板位置调节指令,以将收集板上的容纳槽依次对应导料筒。
64.具体的,在将收集板数量和单块收集架的厚度输入到终端的同时,将收集板中相邻容纳槽之间的间距也输入到终端;若判定有金属条原料落入对应的容纳槽中,则获取相邻容纳槽之间的间距信息,触发收集板位置调节指令,以将收集板上的容纳槽依次对应导料筒,从而即可完成单块收集板进行金属条原料收集。
65.s50:获取收集板的位置调节次数信息和单个收集板的容纳槽数量信息,将位置调节次数信息和容纳槽数量信息进行对比,判断位置调节次数是否等于容纳槽数量信息。
66.具体的,在将收集板数量和单块收集架的厚度输入到终端的同时,将单个收集板的容纳槽数量也输入到终端;每触发一次收集板位置调节指令即计算一次收集板的位置调节次数,实时获取收集板的位置调节次数信息,每获取一次收集板的位置调节次数时,即将该位置调节次数与容纳槽数量进行对比,通过判断位置调节次数是否等于容纳槽数量,以判断该收集板中的每个容纳槽是否完成金属条原料收集;该方法直接,并且准确性高。
67.s60:若等于,则触发收集板回收指令,以将收集板输送至滑动架的出料端。
68.具体的,若判定位置调节次数等于容纳槽数量信息,则判定该收集板中的每个容纳槽均完成金属条原料收集,然后触发收集板回收指令,以将收集板输送至滑动架的出料端且对应位于盛物箱内的提手中的插接杆位置处。
69.更具体的,当需要对下一个位于滑动架的进料端处的收集板进行移动时,则先驱使驱动杆移动至卸料位进行复位,然后再根据移动距离信息,进行对下一个收集板进行移
动。
70.在一实施例中,参照图9,在触发收集板位置调节指令过程中,方法还包括:s41:获取预设定的间隔时间信息,判断在预设定的间隔时间内是否有金属条原料落入对应导料筒位置的容纳槽。
71.在本实施例中,预设定的间隔时间是指相邻两个金属条原料输送至导料筒位置时,间隔的最长时间。
72.具体的,通过多次的实验,计算得到多个间隔时间,对比得出其中最长的时间作为预设定的间隔时间;在将收集板数量和单块收集架的厚度输入到终端的同时,将预设定的间隔时间也输入到终端;每次触发收集板位置调节指令时,均获取预设定的间隔时间信息,判断在预设定的间隔时间内是否有金属条原料落入对应导料筒位置的容纳槽,即判断该同批次的金属条原料是否完成加工;当同批次的金属条原料完成加工后,减少出现未装满的收集板中的金属条原料无法及时运输到下一个加工工序的情况。
73.s42:若否,则触发同组收集板组合指令,以将位于卸料位和位于滑动架进料端处的同组收集板输送至滑动架出料端。
74.具体的,若判定在预设定的间隔时间内没有金属条原料落入对应导料筒位置的容纳槽,则判定该同批次的金属条原料完成加工,触发同组收集板组合指令,以将位于卸料位和位于滑动架进料端处的同组收集板输送至滑动架出料端,进行组装成收集架,使得工人更加方便地将该未装满的收集架及时运送至下一个加工工序,提高加工效率。
75.在一实施例中,参照图10,在步骤s60之后,方法还包括:s61:获取收集板回收指令的触发次数信息,根据触发次数信息和预设定的同组收集板数量信息,判断触发次数是否等于预设定的同组收集板数量。
76.在本实施例中,预设定的同组收集板数量是指工人放置在滑动架进料端处的收集架中的收集板数量。
77.具体的,在将收集板数量和单块收集架的厚度输入到终端的同时,将预设定的同组收集板数量也输入到终端;每触发一次收集板回收指令即计算一次触发次数,实时获取收集板回收指令的触发次数信息,每获取一次触发次数时,即将该触发次数与预设定的同组收集板数量进行对比,通过判断触发次数是否等于预设定的同组收集板数量,以判断同组的收集板是否全部集齐在滑动架出料端处;该方法准确性高。
78.s62:若等于,则触发收集架组装指令,以将位于滑动架出料端的同组收集板组装成收集架。
79.具体的,若判定触发次数等于预设定的同组收集板数量,即判定同组的收集板全部集齐在滑动架出料端处,则触发收集架组装指令,以将位于盛物箱内最底部的提手推出,并将该提手的插接杆插入到插接槽内,从而使位于滑动架出料端的同组收集板组装成收集架,便于工人将整个收集架从滑动架出料端搬运至下一个加工工序,提高加工效率。
80.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1