一种晶棒自动翻转上下料装置及其使用方法与流程
1.本发明属于晶片加工领域,具体涉及一种晶棒自动翻转上下料装置及其使用方法。
背景技术:
2.半导体晶片的制造需要经过很多道不同的工序;通常,首先使用提拉法制成半导体晶棒,制得的半导体晶棒具有圆柱状的晶身部和锥状的端部,接着通过截断机将锥状的端部切离,从而获取圆柱状的半导体晶棒;之后,半导体晶棒进入精磨工序,对晶棒进行外圆磨;最后将晶棒切割为具有精确厚度的晶片;现有技术中,在晶棒在磨削工序中,多采用人工上下料,效率低下。
技术实现要素:
3.针对现有技术的不足,本发明的目的在于提供一种晶棒自动翻转上下料装置及其使用方法,解决了现有技术中人工上下料效率低的问题。
4.本发明的目的可以通过以下技术方案实现:
5.一种晶棒自动翻转上下料装置,包括底板,底板上设置有精磨工位,所述精磨工位包括与底板滑动连接的第一固定板,第二固定板上设置有能够转动的三爪卡盘;底板上设置有顶杆机构,顶杆机构包括与底板滑动连接的第二固定板,第二固定板上转动连接有顶杆安装座,顶杆安装座的一端滑动连接有顶杆,顶杆与三爪卡盘同轴,顶杆与顶杆安装座之间安装有第一弹簧;底板上端设置有两个驱动机构,来分别驱动第一固定板和第二固定板滑动;
6.所述底板上端设置有翻转移动机构,翻转移动机构包括与的底板滑动连接的滑块,滑块的滑动方向与三爪卡盘的轴向垂直;滑块的上端转动连接有转轴,转轴的上端固定有横杆,横杆的端部设置有用于夹持晶棒的夹持机构;
7.所述转轴上固定有第二齿轮,底板上固定有第二齿条,在滑块的滑动过程中,第二齿条能够与第二齿轮相互啮合;第二齿条设置在远离精磨工位的一侧,使得第二齿条在于第二齿轮啮合而带动晶棒翻转的过程中,不会与精磨工位上的机构干涉;当滑块运动至距离精磨工位的最近端点时,夹持机构上的晶棒恰好与三爪卡盘同轴。
8.进一步地,所述夹持机构包括固定在横杆一端的安装板,安装板上滑动连接有两个夹块,两个夹块上分别固定有一个第三齿条,安装板上固定有第三驱动装置,第三驱动装置的驱动轴上固定有第三齿轮,第三齿轮位于两个第三齿条之间,并同时与两个第三齿条啮合,从而使得两个夹块的同步反向滑动。
9.进一步地,,所述滑块的上端设置有多个阻尼机构,所述阻尼机构包括第三固定板,第三固定板通过螺栓连接方式与滑块固定连接;第三固定板的一侧设置有圆弧板,圆弧板上设置有与转轴外圆相互配合的圆弧面,圆弧板靠近第三固定板的一侧设置有两个导杆,导杆穿过第三固定板,并与第三固定板滑动连接,导杆上套有第二弹簧,第二弹簧的两
端分别与第三固定板的侧面以及圆弧板的侧面固定连接,在第二弹簧的弹力作用下,圆弧板上的圆弧面紧贴在转轴上,利用摩擦力来对转轴的转动产生阻尼。
10.进一步地,所述滑块上安装有卡合机构,卡合机构包括与滑块滑动连接的固定杆,固定杆的一端滑动连接有滑动杆,滑动杆与固定杆之间安装有第三弹簧;滑块上设置有挡板,挡板与固定杆之间安装有第四弹簧,在第四弹簧的弹力作用下,滑动杆的端部能够与第二齿轮的相邻两齿间卡合;
11.所述滑块的上端转动连接有第一转动杆,第一转动杆上固定有第四齿轮和第五齿轮,固定杆的一侧设置有第四齿条,第四齿条能够与第四齿轮相互啮合,底板上端固定有第五齿条,随着滑块的滑动,第五齿条能够与第五齿轮发生啮合;
12.在所述滑块朝着远离精磨工位方向滑动的过程中,第五齿条与第五齿轮啮合,并能够带动固定杆朝着远离转轴的方向滑动,且在第二齿轮与第二齿条啮合之前,滑动杆的端部能够离开第二齿轮,避免晶棒的翻转受阻;在滑块朝着靠近精磨工位方向滑动的过程中,第五齿条与第五齿轮啮合,并能够带动固定杆朝着靠近转轴的方向滑动,并且,在第二齿轮与第二齿条脱离之前,滑动杆的端部不会与第二齿轮接触卡合;随着滑块继续朝着精磨工位滑动的过程中,第五齿条与第五齿轮脱离,在第四弹簧的弹力作用下,滑动杆的端部能够与第二齿轮的相邻两齿间卡合。
13.在所述第二齿轮与第二齿条啮合的整个过程中,第五齿条均与第五齿轮啮合。
14.进一步地,所述转动杆上设置有第二限位块,固定杆上开设有第二限位槽,第二限位块位于第二限位槽内,且在第三弹簧的弹力作用下,第二限位块能够靠近第二限位槽的端部。
15.进一步地,所述驱动机构包括固定在底板上端的第一固定架,第一固定架上滑动连接有第一齿条,两个第一齿条分别与第一固定板和第二固定板固定连接;第一固定架上固定有第一驱动装置,第一驱动装置的驱动轴上固定有第一齿轮,第一齿轮与第一齿条相互啮合;
16.所述底板上设置有两个锁紧机构,两个锁紧机构分别用于对两个驱动机构的驱动进行限制;锁紧机构包括固定在底板上端的第二固定架,第二固定架上滑动连接有升降杆,且滑动方向为竖直方向,升降杆的下端设置有卡块,卡块能够与第一齿条的相邻两齿间卡合;升降杆上套有第五弹簧,第五弹簧的两端分别与第二固定架以及卡块固定连接,在第五弹簧的弹力作用下,卡块能够与第一齿条的相邻两齿间卡合。
17.进一步地,所述滑块的两侧分别设置有个联动机构,联动机构包括固定在底板上的第四固定板,第四固定板上转动连接有第二转动杆,第二转动杆上固定有第六齿轮,升降杆的上端固定有第一连接杆,第一连接杆上设置有第六齿条,第六齿条与第六齿轮啮合;滑块的一侧固定有第二连接杆,第二连接杆的端部固定有第七齿条,第七齿条在随着滑块滑动过程中,能够与第六齿轮发生啮合;并且,在滑块靠近精磨工位滑动的过程中,第七齿条与第六齿轮啮合,并能够带动第一连接杆上升;
18.当所述滑块运动到距离精磨工位的最近端点时,晶棒与三爪卡盘同轴时,卡块刚好离开第一齿条。
19.进一步地,所述顶杆上设置有第一限位块,顶杆安装座上设置有第一限位槽,第一限位块位于第一限位槽内,并且在第一弹簧的弹力作用下,第一限位块能够紧贴在第一限
位槽的一端。
20.进一步地,所述滑块上端开设有多个螺纹孔,第三固定板能够分别固定多个螺纹孔中,使得第三固定板在滑块上的位置可调,从而达到调节圆弧面与转轴之间摩擦的目的。
21.本发明的有益效果:通过在底板上端设置三爪卡盘和顶杆机构来对晶棒进行夹持固定,以便于外圆精磨,并通过设置两个驱动机构来分别驱动三爪卡盘和顶杆机构移动,来便于上下料;通过在底板上端设置翻转移动机构,并在翻转机构机构上设置夹持机构,来实现对晶棒的移动翻转,进而实现上下料,并通过将第二齿条设置在远离精磨工位处,来防止晶棒的翻转动作与精磨工位的机构发生干涉;通过在滑块的上设置阻尼机构,防止在转轴受到惯性或者在不受外力约束的情况下而发生转动,导致晶棒无法与卡盘同轴,而导致上料失败;通过在滑块上设置卡合机构,来防止晶棒翻转完成后,转轴受到外界干扰,而再次转动,从而影响上料精度;通过设置两个锁紧机构,来限制两个驱动机构的驱动,并通过在滑块的两侧分别设置一个联动机构,来分别控制两个锁紧机构的锁紧时机,实现只有当滑块滑动到位,晶棒与三爪卡盘同轴时,锁紧机构才能够释放驱动机构运行,避免晶棒未能到位,驱动机构就带动三爪卡盘和顶杆相互靠近,从而对晶棒的移动造成干涉。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
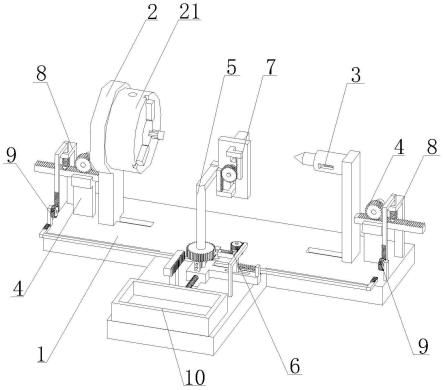
23.图1是本发明实施例的整体结构示意图;
24.图2是本发明实施例的顶杆机构结构示意图;
25.图3是本发明实施例的驱动机构结构示意图;
26.图4是本发明实施例的翻转移动机构结构示意图;
27.图5是本发明实施例的阻尼机构结构示意图
28.图6是本发明实施例的夹持机构结构示意图;
29.图7是本发明实施例的卡合机构结构示意图;
30.图8是本发明实施例的固定杆结构示意图;
31.图9是本发明实施例的锁紧机构结构示意图;
32.图10是本发明实施例的联动机构结构示意图
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
34.如图1所示,一种晶棒自动翻转上下料装置包括底板1,底板1的上端设置有精磨工位,用于对晶棒进行外圆磨;精磨工位包括与底板1滑动连接的第一固定板2,第一固定板2的上安装有能够转动的三爪卡盘21,三爪卡盘21能够将晶棒的一端夹持,通过驱动三爪卡板21转动,能够实现对晶棒转动的控制,从而实现对晶棒转动的驱动,便于对外圆进行精
磨;
35.精磨工位还包括顶杆机构3,顶杆机构3用于将晶棒非夹持端顶住,减小挠度,保证外圆磨精度;如图2所示,顶杆机构3包括与底板1滑动连接的第二固定板31,第二固定板31上转动连接有顶杆安装座32,顶杆安装座32的一端滑动连接有顶杆33,顶杆33与三爪卡盘21同轴,顶杆33与顶杆安装座32之间安装有第一弹簧34,从而实现顶杆33与顶杆安装座32之间的弹性连接,避免顶杆33与晶棒端部之间的挤压力过大,导致晶棒损坏;顶杆33上设置有第一限位块331,顶杆安装座32上设置有第一限位槽321,第一限位块331位于第一限位槽321内,并且在第一弹簧34的弹力作用下,第一限位块331能够紧贴在第一限位槽321的一端,从而能够防止顶杆33与顶杆安装座32脱离;
36.底板上设置有两个驱动机构4,两个驱动机构4分别用于驱动第一固定板2和第二固定板31滑动,从而能够分别控制三爪卡盘21和顶杆33位移,便于上下料;
37.如图3所示,驱动机构4包括固定在底板1上端的第一固定架41,第一固定架41上滑动连接有第一齿条42,两个第一齿条42分别与第一固定板2和第二固定板31固定连接,通过分别控制两个第一齿条42滑动,能够分别实现对第一固定板2和第二固定板31滑动的驱动;第一固定架41上固定有第一驱动装置43,第一驱动装置43的驱动轴上固定有第一齿轮44,第一齿轮44与第一齿条42相互啮合,通过控制第一驱动装置43运转,能够实现对第一齿条44滑动的驱动,从而能够分别控制三爪卡盘21和顶杆33位移。
38.底板1上端设置有翻转移动机构5,翻转移动机构5上设置有夹持机构7,夹持机构7用于夹持晶棒,在翻转移动机构5的作用下实现精磨工位上晶棒的上下料;
39.如图4-5所示,翻转移动机构5包括与底板1滑动连接的滑块51,滑块51的滑动方向与三爪卡盘的轴向垂直,底板1上设置有两个固定块,两个固定块之间转动连接有丝杆52,丝杆52穿过滑块51并与滑块51螺纹连接,丝杆52的一端设置有第二驱动装置53,用于驱动丝杆52转动,从而带动滑块51滑动;滑块51的上端转动连接有转轴54,转轴54的上端固定有横杆55,横杆55的端部设置有夹持机构7,通过控制滑块51滑动以及转轴54转动,能够实现对被夹持的晶棒进行移动和翻转,从而来实现上下料;
40.转轴54上固定有第二齿轮57,底板1固定有第二齿条58,在滑块51的滑动过程中,第二齿条58能够与第二齿轮57相互啮合,从而实现转轴54的转动,带动晶棒的翻转;第二齿条58设置在远离精磨工位的一侧,使得第二齿条58在于第二齿轮57啮合而带动晶棒翻转的过程中,不会与精磨工位上的机构干涉,保证上下料的稳定进行;
41.底板1上设置有收纳箱10,当滑块51运动至距离精磨工位的最远端点时,夹持机构7上的精磨好晶棒能够翻转至收纳箱10上方,便于将晶棒卸载至收纳箱10中,并在收纳箱10的上方将新的晶棒装在夹持机构7上;再通过控制滑块51朝着精磨工位滑动,当滑块51运动至距离精磨工位的最近端点时,夹持机构7上的晶棒恰好与卡盘21同轴,在控制两个驱动机构4,来完成上料;
42.在本实施例中,滑块51的上端设置有多个阻尼机构56,防止在第二齿轮57脱离第二齿条58后,受到惯性或者在不受外力约束的情况下而发生转动,导致晶棒无法与卡盘21同轴,而导致上料失败;
43.阻尼机构56包括第三固定板561,第三固定板561通过螺栓连接方式与滑块51固定连接,便于后期拆卸更换;第三固定板561的一侧设置有圆弧板562,圆弧板562上设置有与
转轴54外圆相互配合的圆弧面,圆弧板562靠近第三固定板561的一侧设置有两个导杆563,导杆563穿过第三固定板561,并与第三固定板561滑动连接,导杆563上套有第二弹簧564,第二弹簧564的两端分别与第三固定板561的侧面以及圆弧板562的侧面固定连接,在第二弹簧564的弹力作用下,圆弧板562上的圆弧面紧贴在转轴54上,利用摩擦力来对转轴54的转动产生阻尼,避免转轴54受到惯性或者在不受外力约束的情况下而发生转动,导致晶棒无法与卡盘21同轴,而导致上料失败;
44.导杆563的端部设置有圆台5631,圆台5631的直径大于导杆563的直径,从而能够防止在第二弹簧564的弹力作用下,导杆563与第三固定板561脱离;
45.在本实施例中,滑块51上端开设有多个螺纹孔,第三固定板561能够分别固定在上述螺纹孔中,使得第三固定板561在滑块51上的位置可调,从而达到调节圆弧面562与转轴54之间摩擦的目的。
46.如图6所示,夹持机构7包括固定在横杆55一端的安装板71,安装板71上滑动连接有两个夹块72,两个夹块72上分别固定有一个第三齿条73,安装板71上固定有第三驱动装置74,第三驱动装置74的驱动轴上固定有第三齿轮75,第三齿轮75位于两个第三齿条73之间,并同时与两个第三齿条73啮合,从而实现了两个夹块72的同步反向滑动,进而能够实现对晶棒的夹持。
47.滑块51的上端设置有卡合机构6,卡合机构6用于限制转轴54的转动,防止在滑块51滑动且第二齿轮57与第二齿条58脱离的过程中,转轴54受到外界干扰,导致转轴54转动,从而影响上料精度;在第二齿轮57与第二齿条58脱离且不与卡合机构6作用的这段间隙内,由阻尼机构56来防止转轴54受到转动的惯性而发生转动;
48.如图7-8所示,卡合机构6包括与滑块51滑动连接的固定杆61,固定杆61的一端滑动连接有滑动杆62,滑动杆62的端部能够与第二齿轮57的相邻两齿间卡合,滑动杆62与固定杆61之间安装有第三弹簧63,从实现滑动杆62与固定杆61之间的弹性连接,使得在滑动杆62端部与第二齿轮57接触后,固定杆61仍能够朝着第二齿轮57处靠近,以减少干涉的可能性;滑块51上设置有挡板511,挡板511与固定杆61之间安装有第四弹簧64,第四弹簧64的两端分别与挡板511的侧面以及固定杆61的侧面固定连接,在第四弹簧64的弹力作用下,使得滑动杆62的端部能够与第二齿轮57的相邻两齿间卡合,从而限制转轴54的转动;
49.滑块51的上端转动连接有第一转动杆65,第一转动杆65上固定有第四齿轮66和第五齿轮67,固定杆61的一侧设置有第四齿条612,第四齿条612能够与第四齿轮66相互啮合,底板1上端固定有第五齿条68,随着滑块51的滑动,第五齿条68能够与第五齿轮67发生啮合;
50.在本实施例中,在滑块51朝着远离精磨工位方向滑动的过程中,第五齿条68与第五齿轮67啮合,并能够带动固定杆61朝着远离转轴54的方向滑动,且在第二齿轮57与第二齿条58啮合之前,滑动杆62的端部能够离开第二齿轮57,避免晶棒的翻转受阻;在滑块51朝着靠近精磨工位方向滑动的过程中,第五齿条68与第五齿轮67啮合,并能够带动固定杆61朝着靠近转轴54的方向滑动,并且,在第二齿轮57与第二齿条58脱离之前,滑动杆62的端部不会与第二齿轮57接触卡合;随着滑块51继续朝着精磨工位滑动的过程中,第五齿条68与第五齿轮67脱离,在第四弹簧64的弹力作用下,滑动杆62的端部能够与第二齿轮57的相邻两齿间卡合,来限制转轴54的转动,保证上料精度;
51.在滑块第二齿轮57与第二齿条58啮合的整个过程中,第五齿条68均与第五齿轮67啮合,防止在第四弹簧64的弹力作用下,使得滑动杆62的端部与第二齿轮57的相邻两齿间卡合,从而限制转轴54的转动和晶棒的翻转;
52.在本实施例中,滑动杆62上设置有第二限位块621,固定杆61上开设有第二限位槽611,第二限位块621位于第二限位槽611内,且在第三弹簧63的弹力作用下,第二限位块621能够靠近第二限位槽611的端部,从而能够防止滑动杆62与固定杆61脱离。
53.底板1的上端设置有两个锁紧机构8,两个锁紧机构8分别用与对两个驱动机构4的驱动进行限制;
54.如图9所示,锁紧机构8包括固定在底板1上端的第二固定架81,第二固定架81上滑动连接有升降杆82,且滑动方向为竖直方向,升降杆82的下端设置有卡块821,卡块821能够与第一齿条42的相邻两齿间卡合;升降杆82上套有第五弹簧83,第五弹簧83的两端分别与第二固定架81以及卡块821固定连接,在第五弹簧83的弹力作用下,卡块821能够与第一齿条42的相邻两齿间卡合,从而限制第一齿条42的滑动,达到限制驱动机构4驱动的目的。
55.滑块51的两侧分别设置有个联动机构9,两个联动机构9分别用于控制两个锁紧机构8的锁紧时机,实现只有当滑块51滑动到位,晶棒与三爪卡盘21同轴时,锁紧机构8才能够释放驱动机构4运行,避免晶棒未能到位,驱动机构4就带动三爪卡盘21和顶杆33相互靠近,从而对晶棒的移动造成干涉;
56.如图10所示,联动机构9包括固定在底板上的第四固定板91,第四固定板91上转动连接有第二转动杆92,第二转动杆92上固定有第六齿轮93,升降杆82的上端固定有第一连接杆94,第一连接杆94上设置有第六齿条941,第六齿条941与第六齿轮93啮合;滑块51的一侧固定有第二连接杆95,第二连接杆95的端部固定有第七齿条96,第七齿条96在随着滑块51滑动过程中,能够与第六齿轮93发生啮合;并且,在滑块51靠近精磨工位滑动的过程中,第七齿条96与第六齿轮93啮合,并能够带动第一连接杆94上升;
57.在本实施例中,当滑块51运动到距离精磨工位的最近端点时,晶棒与三爪卡盘21同轴时,卡块821刚好离开第一齿条42;此时,在第一驱动装置43的驱动下,三爪卡盘21和顶杆33均能够靠近晶棒,并对晶棒进行定位固定,方便精磨。
58.一种晶棒自动翻转上下料装置的使用方法包括:
59.s1上料:将晶棒用夹持机构7进行夹持,并通过控制第二驱动装置53运转,来使滑块51朝着精磨工位滑动;
60.s2定位固定:滑块51滑动到位后,再分别控制两个第一驱动装置43运转,使三爪卡盘21和顶杆33作用于晶棒,完成定位固定;
61.s3精磨:控制三爪卡盘21转动,再配合上砂轮对晶棒外圆进行精磨;
62.s4卸料:控制夹持机构7将晶棒夹持,松开三爪卡盘21的卡钳,再分别控制两个第一驱动装置43运转,使三爪卡盘21和顶杆33后撤,再控制第二驱动装置53运转,将精磨后的晶棒卸下。
63.工作原理:
64.通过在底板1上端设置三爪卡盘21和顶杆机构3来对晶棒进行夹持固定,以便于外圆精磨,并通过设置两个驱动机构4来分别驱动三爪卡盘21和顶杆机构3移动,来便于上下料;通过在底板1上端设置翻转移动机构5,并在翻转机构机构5上设置夹持机构7,来实现对
晶棒的移动翻转,进而实现上下料,并通过将第二齿条58设置在远离精磨工位处,来防止晶棒的翻转动作与精磨工位的机构发生干涉;通过在滑块51的上设置阻尼机构56,防止在转轴54受到惯性或者在不受外力约束的情况下而发生转动,导致晶棒无法与卡盘21同轴,而导致上料失败;通过在滑块51上设置卡合机构6,来防止晶棒翻转完成后,转轴54受到外界干扰,而再次转动,从而影响上料精度;通过设置两个锁紧机构8,来限制两个驱动机构4的驱动,并通过在滑块51的两侧分别设置一个联动机构9,来分别控制两个锁紧机构8的锁紧时机,实现只有当滑块51滑动到位,晶棒与三爪卡盘21同轴时,锁紧机构8才能够释放驱动机构4运行,避免晶棒未能到位,驱动机构4就带动三爪卡盘21和顶杆33相互靠近,从而对晶棒的移动造成干涉。
65.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
66.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1