1.本发明涉及一种机器人末端恒力浮动装置及打磨系统,属于机器人末端执行器技术领域。
背景技术:2.零件的打磨抛光是一道重要的工序,传统的方式依靠人力作业,加工效率低,工作环境差,一致性差。近年来,采用工业机器人进行打磨抛光成为主流。而机器人打磨抛光属于连续接触式作业,接触力的控制成为影响打磨质量和打磨效率的关键因素。通常的做法是在机器人末端额外增加浮动装置,通过浮动装置获得恒定的打磨接触力。
3.按照受力方式不同,浮动装置分为轴向浮动和径向浮动两种。轴向浮动装置主要应用于工件表面的打磨,径向浮动装置主要应用于工件侧面的打磨。
4.现有的径向浮动装置主要包括两类,一类径向摆动的形式,通过在浮动装置前端设置万向/调心轴承,后端通过气压夹持,实现360
°
的径向摆动,主要用于工件倒角、去毛刺等,不能用于工件侧面的打磨;另一类是移动的形式,通过单自由度的径向平移,实现工件侧面打磨,机器人在轨迹规划时需将浮动装置的浮动方向时刻与打磨接触面保持垂直。
5.实际打磨过程中,由于零件局部存在微小凸台和凹坑、零件模型和实物不完全一致、机器人定位精度达不到等因素,径向浮动装置只有单自由度的径向浮动能力是不够的,故考虑采用平面两自由度平移的设计方案,但是,传统的双层串联式设计方案,仅仅简单的将两个单自由度平移运动的平台叠在一起,在底层平台运动的同时,上层平台整个部件都会跟随底层平台运动,故存在运动部分重量大、电线/气管需增加拖链、传动间隙大等多种不利情况。
技术实现要素:6.本发明的主要目的在于提供一种机器人末端恒力浮动装置及打磨系统,从而克服现有技术中的不足。
7.为实现前述发明目的,本发明采用的技术方案包括:
8.本发明提供了一种机器人末端恒力浮动装置,包括:固定底座、第一移动平台、第二移动平台以及第三导向机构、第一驱动机构和第二驱动机构。
9.在一些具体的实施方案中,所述第一移动平台与所述固定底座活动配合,且与所述第一驱动机构的第一运动部件连接,所述第一驱动机构与所述固定底座固定连接,所述第一移动平台能够在所述第一驱动机构的驱使下沿第一方向运动。
10.在一些具体的实施方案中,所述第二移动平台与所述第一移动平台活动配合,并能够与所述第一移动平台一起沿第一方向同步运动,所述第三导向机构分别与所述第二移动平台、第二驱动机构的第二运动部件连接,所述第二驱动机构与所述固定底座固定连接,所述第三导向机构既能使所述第二移动平台在所述第二驱动机构的驱使下沿第二方向运动,又能使所述第二移动平台与所述第二驱动机构沿第一方向可产生相对运动;其中,所述
第一方向和第二方向垂直设置。
11.在一些具体的实施方案中,所述的第一驱动机构驱动所述第一移动平台沿第一方向移动的同时,所述第二移动平台也会沿第一方向移动,此时,固定于第二移动平台上的第三导向机构会相对于第二驱动机构沿第一方向产生相对运动,而第二驱动机构自身不跟随第一移动平台运动;所述第二移动平台在所述第二驱动机构的驱使下沿第二方向运动;最终实现第二移动平台在平面内两自由度的运动。
12.在一些具体的实施方案中,所述第三导向机构包括第三导轨和第三滑块,所述第三导轨与所述第二运动部件和第二移动平台中的一者固定连接且沿第一方向延伸,所述第三滑块与所述第二运动部件和第二移动平台中的另一者固定连接,所述第三滑块与所述第三导轨活动配合,所述第三滑块与所述第三导轨能够在第一方向上发生相对运动而在第二方向上同步运动。
13.在一些具体的实施方案中,所述第二移动平台具有朝向所述第一移动平台的第三面,所述第三面还设置有沿第一方向延伸的第三收容槽,所述第三收容槽与所述第一移动平台围合形成第三收容空间,所述第三导轨和滑块设置在所述第三收容空间内。
14.在一些具体的实施方案中,所述第三面与xy平面平行。
15.在一些具体的实施方案中,所述第一方向为x轴方向,第二方向为y轴方向。
16.在一些具体的实施方案中,所述第二运动部件沿第二方向延伸设置,所述第二运动部件还经一转接块与所述第三导轨或滑块固定连接。
17.在一些具体的实施方案中,所述第一移动平台和第二移动平台之间还设置有第二导向机构,所述第二导向机构包括第二导轨和第二滑块,所述第二导轨固定设置在所述第一移动平台和第二移动平台中的一者上且沿第二方向延伸,所述第二滑块固定设置在所述第一移动平台和第二移动平台中的另一者上,所述第二滑块与所述第二导轨活动配合,而使所述第一移动平台和第二移动平台能够沿第二方向发生相对运动。
18.在一些具体的实施方案中,所述第三面还设置有沿第二方向延伸的第四收容槽,所述第四收容槽与所述第一移动平台围合形成第二收容空间,所述第二导轨和第二滑块设置在所述第二收容空间内。
19.在一些具体的实施方案中,所述第一移动平台和固定底座之间还设置有第一导向机构,所述第一导向机构包括第一导轨和第一滑块,所述第一导轨固定设置在所述第一移动平台和固定底座中的一者上且沿第一方向延伸,所述第一滑块固定设置在所述第一移动平台和固定底座中的另一者上,所述第一滑块与所述第一导轨活动配合,而使所述第一移动平台和固定底座能够沿第一方向发生相对运动。
20.在一些具体的实施方案中,所述固定底座具有朝向所述第一移动平台的第一面,所述第一面还设置有沿第一方向延伸的第一收容槽,所述第一收容槽与所述第一移动平台围合形成第一收容空间,所述第一导轨和第一滑块设置在所述第一收容空间内。
21.在一些具体的实施方案中,所述第一移动平台还具有第二面,所述第二面与第一面相对设置,所述第二面设置有沿第一方向延伸的第二收容槽,所述第一收容槽和第二收容槽围合形成所述的第一收容空间,所述第一导轨和第一滑块中的一者设置在所述第一收容槽内,另一者设置在所述第二收容槽内。
22.在一些具体的实施方案中,所述第一移动平台整体设置在所述第一收容槽内。
23.在一些具体的实施方案中,所述第一面与xy平面平行。
24.在一些具体的实施方案中,所述第一运动部件沿第一方向延伸设置。
25.在一些具体的实施方案中,所述固定底座、第一移动平台、第二移动平台均为环形构件。
26.本发明还提供了一种打磨系统,包括所述的机器人末端恒力浮动装置以及机械臂、打磨主轴,所述机械臂与固定底座固定连接,所述打磨主轴与第二移动平台固定连接。
27.与现有技术相比,本发明的优点包括:
28.1)本发明提供的一种机器人末端恒力浮动装置,具有两个自由度,灵活性更好,适用面更广,使用时不需要时刻与工件接触面保持垂直,从而降低了机器人轨迹规划的难度,提高了打磨效率;
29.2)本发明提供的一种机器人末端恒力浮动装置,通过增加第三导向机构,使第二驱动机构不会跟随第一移动平台运动,一方面,降低了运动部分的重量,实现了动平台的轻量化,提高了系统的响应速度;另一方面,不需要增加拖链等结构,并降低了传动间隙;
30.3)本发明提供的一种机器人末端恒力浮动装置,通过嵌入式镂空实现了封闭式结构设计,将所有运动和驱动部件全部密封在其内部,防止打磨环境中大量的碎末和粉尘进入内部,提高了装置运行的可靠性。
附图说明
31.图1是本发明一典型实施案例中提供的一种机器人末端恒力浮动装置的整体结构示意图;
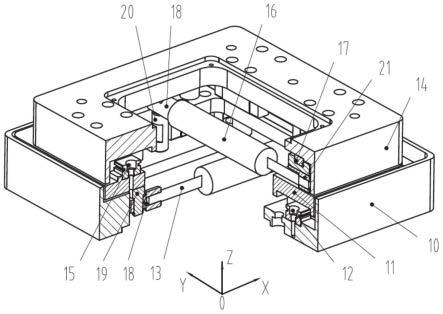
32.图2是本发明一典型实施案例中提供的一种机器人末端恒力浮动装置去掉上下盖板后的立体剖视图;
33.图3是本发明一典型实施案例中提供的一种机器人末端恒力浮动装置的俯视图;
34.图4是图3中a-a剖视图;
35.图5是图4的b-b剖视图;
36.图6是本发明一典型实施案例中提供的一种打磨系统对工件进行侧面打磨的侧视图;
37.附图标记说明:
38.10-固定底座;11-第一移动平台;12-第一导向机构;13-第一驱动机构;14-第二移动平台;15-第二导向机构;16-第二驱动机构;17-第三导向机构;18-接头;19-支座;20-销轴;21-转接块;22-上盖板;23-下盖板;24-包胶螺丝;25-打磨主轴;26-工件;27-法兰。
具体实施方式
39.鉴于现有技术中的不足,本案发明人经长期研究和大量实践,得以提出本发明的技术方案。如下将对该技术方案、其实施过程及原理等作进一步的解释说明,需要说明的是,本发明实施例意在结合附图解释本发明实施例中的机器人末端恒力浮动打磨装置的结构组成和工作原理等,其中所采用的诸如驱动电机、气缸、导轨、滑块以及机械臂等均可以是本领域技术人员已知的,其中组成部件的尺寸等可以根据具体情况进行调整,在此不做具体的限定和说明。
2,其中,所述第二导轨15-1与第一移动平台11固定连接,所述第二滑块15-2与第二移动平台14固定连接,在所述第二驱动机构16的驱使下,所述第二移动平台14和第一移动平台11之间能够沿第二方向产生相对运动,所述第二方向为y轴方向。
49.在本实施例中,所述第二移动平台14具有沿第三方向朝向所述第一移动平台11的第三面,所述第三面还设置有沿第二方向延伸的第四收容槽,所述第四收容槽与所述第一移动平台(11)围合形成第二收容空间,所述第二导轨(15-1)和第二滑块(15-2)设置在所述第二收容空间内,其中,所述第二滑块15-2固定设置在所述第四收容槽内。
50.在本实施例中,所述第二驱动机构16用于驱动第二移动平台14沿y轴方向运动,所述第二驱动机构16具体可以是气缸、氮气弹簧等可提供恒定出力的部件,本实施例中的第二驱动机构16优选氮气弹簧;所述第二驱动机构16的后端通过接头18、销轴20与固定底座10固定连接,前端通过第三导向机构17与第二移动平台14滑动连接,关于第二驱动机构的后端、前端的解释可以参考对第一驱动机构的定义和解释。
51.在本实施例中,所述第三导向机构17包括第三导轨17-1和第三滑块17-2,所述第三导轨17-1的延伸方向与第一导轨12-1的延伸方向平行,即沿第一方向延伸,所述第三导轨17-1与第二移动平台14固定连接,所述第三滑块17-2通过转接块21与第二驱动机构16的前端(可以是第二运动部件)固定连接。
52.在本实施例中,所述第三面还设置有沿第一方向延伸的第三收容槽,所述第三收容槽与所述第一移动平台围合形成第三收容空间,所述第三导轨17-1和第三滑块17-2设置在所述第三收容空间内,其中,所述第三导轨17-1固定设置在所述第三收容槽内。
53.在本实施例中,所述第一面和第三面均与xy平面平行。
54.在本实施例中,所述的第一驱动机构13驱动第一移动平台11沿x轴移动的同时,所述第二移动平台14也会沿x轴移动,固定于第二移动平台14上的第三导轨17-1也相对于第二驱动机构16沿x轴方向移动,但是,第二驱动机构16不跟随第一移动平台11运动,从而降低了运动部分的重量,实现了动平台的轻量化,提高了系统的响应速度;另一方面,不需要增加拖链等结构,并降低了传动间隙。
55.在本实施例中,所述固定底座10、第一移动平台11和第二移动平台14均为环形结构,通过嵌入式镂空设计的环形结构,将第一导向机构12、第一驱动机构13、第一移动平台11等全部设置于固定底座10内部的环形空间中;所述第二移动平台14同样通过嵌入式的镂空设计将第二导向机构15、第二驱动机构16、第三导向机构17等全部设置于第二移动平台14的环形结构内部,从而可实现封闭式结构设计,将所有运动和驱动部件全部密封保护起来,防止打磨环境中大量的碎末和粉尘进入装置内部。
56.在本实施例中,所述第一移动平台11沿z轴的上下两侧分别设置有若干包胶螺丝24,用于第一移动平台11和第二移动平台14在xy平面内的极限位置进行机械限位,所述固定底座10下方还设置有下盖板23,所述下盖板23对应设置在所述固定底座10中间区域的环形开口处并与固定底座密封连接,所述第二移动平台14上方设置有上盖板22,上盖板22对应设置在所述第二移动平台14中间区域的环形开口处并与第二移动平台14密封连接,从而对内部结构起到密封、防尘作用,并方便安装维护。
57.请参阅图6,在工作时,将机器人末端恒力浮动装置设置在机械臂末端和打磨主轴之间,具体为,将固定底座10与机械臂末端的法兰27直接或间接固定连接,将第二移动平台
14与打磨主轴25直接或间接固定连接,从而组成了机器人侧面打磨系统,进而可对工件26的侧面进行恒力浮动打磨。
58.本发明实施例提供的一种机器人末端恒力浮动装置,第二驱动机构不是设置在第一移动平台上,而是设置在固定底座上,并通过第三导向机构与第二移动平台滑动连接,使第二驱动机构不跟第一移动平台运动,从而降低了运动部分的重量,实现了动平台的轻量化,提高了系统的响应速度;另一方面,不需要增加拖链等结构,并降低了传动间隙。
59.本发明实施例提供的一种机器人末端恒力浮动装置,跟传统的单自由度方案相比,灵活性更好,适用面更广,降低了机器人轨迹规划的难度,提高了打磨效率;跟传统的双层串联式两自由度方案相比,本发明实施例提供的一种机器人末端恒力浮动装置,通过增加第三导向机构使两驱动机构都不会跟随末端运动,从而降低了运动部分的重量,不需要增加拖链等结构,降低了传动间隙。另外,本发明实施例提供的机器人末端恒力浮动装置,通过合理的镂空设计将所有导向机构和驱动机构全部封闭于装置内部,既实现了轻量化设计,又提高了其长时间运行的稳定性和可靠性。
60.应当理解,上述实施例仅为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。