一种新能源汽车进门踏板打磨机
1.本发明涉及打磨设备领域,具体为一种新能源汽车进门踏板打磨机。
背景技术:
2.新能源汽车进门踏板是一种在汽车门槛部位进行装饰方便上下车,并能起到保护车体、美化车体作用的汽车零配件。考虑到上下车的方便性,以及为了使车体更美观,越来越多的人忠爱于带进门踏板的汽车。
3.新能源汽车进门踏板零件是由铝合金挤压的型材,然而在加工过程中零件表面会产生辊印、划痕等缺陷。截至目前为止,还没有较为成熟的打磨机械用于新能源汽车进门踏板零件缺陷的打磨。许多厂家为了去除新能源汽车进门踏板的这些缺陷,主要采用人工的方法进行打磨,但人工打磨不仅去除效果差、效率不高、打磨质量低,且作业环境恶劣对工人危害很大,浪费了大量的劳动力。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种新能源汽车进门踏板打磨机,去除缺陷效果好,打磨效率高,解决了背景技术中的问题。
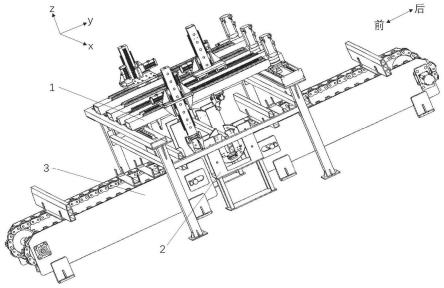
5.为实现以上目的,本发明通过以下技术方案予以实现:一种新能源汽车进门踏板打磨机,包括龙门机器人,所述龙门机器人下方设有翻转机构,翻转机构的两侧均设有传送机构;
6.所述翻转机构包括两个翻转机架,每个翻转机架内均可转动连接有翻转组件,其中一个翻转机架上设有对翻转组件驱动的翻转电机;
7.所述龙门机器人包括龙门架,龙门架上设有三个x向线性模组,每个x向线性模组上均安装有y向线性模组,y向线性模组上安装有z向线性模组,位于龙门架中部的z向线性模组底部安装有砂带机,另两个z向线性模组底部安装有夹持机构。
8.进一步限定,所述传送机构包括传送机架,传送机架的内侧两端分别通过转轴安装有链轮,链轮之间安装有链条,传送机架外侧的方形板上安装有传送电机,传送电机输出轴通过联轴器与其中一个转轴连接,所述传送机架两侧的链条之间安装有不少于一个的踏板放置架。
9.进一步限定,所述翻转组件包括两个通过连杆连接的开槽支撑板,开槽支撑板为圆形,翻转机架内侧设有对开槽支撑板导向的光轮,所述翻转机架的上安装有翻转电机,翻转电机输出轴上的齿轮副与其中一个开槽支撑板边缘的齿槽啮合,开槽支撑板上设有夹持限位机构。
10.进一步限定,所述夹持限位机构包括开槽支撑板矩形槽封闭端设有的气爪,气爪的两侧连接有手爪。
11.进一步限定,所述x向线性模组包括固定于龙门架上的x向导轨和x向齿条,x向导轨上滑动套固定有x向电机,x向电机输出轴的x向驱动齿轮与x向齿条啮合。
12.进一步限定,所述y向线性模组包括与x向导轨套接的横梁,横梁上沿其长度方向设有y向导轨和y向齿条,所述z向模组与y向导轨套接,z向模组上安装有y向电机,y向电机的连接轴上的y向驱动齿轮与y向齿条啮合。
13.进一步限定,所述z向模组包括竖直机械臂和通过滑块与y向导轨套接的z向安装板,z向安装板上固定有三角筋板,三角筋板上竖向开设有滑槽,所述竖直机械臂上的竖向滑条与滑槽滑动连接,所述三角筋板上固定有z向电机,z向电机输出轴上的z向驱动齿轮与竖直机械臂上的z向齿条啮合。
14.本发明具备以下有益效果:本技术可以通过传送机构,龙门机器人和翻转机构实现新能源汽车进门踏板远距离输送、输出以及自动翻转打磨的功能,节约了人力,保证了工作人员的生命健康安全,具体为:
15.1.新能源汽车进门踏板工件由工人放置在传送机构的踏板放置架上,传送电机带动传送机构的链轮旋转,链轮旋转带动链条运动,链条带动踏板放置架及工件向前移动,以实现工件的远距离传送。
16.2.工件由龙门机器人两侧的手爪夹持放入翻转机构,翻转电机通过齿轮副带动夹持限位机构转动可实现对工件的翻转,龙门机器人安装有砂带机,可以进行x、y、z三个方向的移动,以实现对工件的自动打磨,打磨结束,由龙门机器人两侧夹持机构夹持到输出传送机构上,工件完全由龙门机器人进行打磨,打磨过程工人不用参与其中,保护了工人的生命健康安全,提高了打磨效率。
附图说明
17.图1为本发明的整体结构图;
18.图2为本发明的龙门机器人结构图;
19.图3为本发明的x向线性模组结构图;
20.图4为本发明的y向线性模组结构图;
21.图5为本发明的z向线性模组结构图;
22.图6为本发明的翻转机构结构图;
23.图7为本发明的翻转组件结构图;
24.图8为本发明的夹持限位机构结构图;
25.图9为本发明的传送机构结构图;
26.图中:1、龙门机器人;11、龙门架;12、x向线性模组;121、x向导轨;122、x向齿条;123、x向驱动齿轮;124、x向电机;
27.13、y向线性模组;131、横梁;132、y向电机;133、y向导轨;134、y向齿条;135、y向驱动齿轮;
28.14、z向线性模组;141、竖直机械臂;142、z向安装板;143、三角形筋板;144、竖向滑条;145、z向电机;146、z向驱动齿轮;147、z向齿条;
29.15、砂带机;16、夹持机构;
30.2、翻转机构;21、夹持限位机构;211、气爪;212、手爪;22、翻转组件;221、翻转机架;222、齿轮副;223、开槽支撑板;224、光轮;23、翻转电机;
31.3、传送机构;31、传送机架;32、踏板放置架;33、链轮;34、链条;35、传送电机;36、
方形板。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.请参阅图1-9,本发明提供一种技术方案:一种新能源汽车进门踏板打磨机,包括龙门机器人1,龙门机器人1下方设有翻转机构2,翻转机构2的两侧均设有传送机构3,传送机构3包括传送机架31,传送机架31的内侧两端分别通过转轴安装有链轮33,链轮33之间安装有链条34,传送机架31外侧的方形板36上安装有传送电机35,传送电机35输出轴通过联轴器与其中一个转轴连接,传送机架31两侧的链条34之间安装有不少于一个的踏板放置架32,两个传送机构3一个用于上料,另一个用于下料;
34.如图6、7和8,翻转机构2包括两个翻转机架221,每个翻转机架221内均可转动连接有翻转组件22,其中一个翻转机架221上设有对翻转组件22驱动的翻转电机23;
35.如图2,龙门机器人1包括龙门架11,龙门架11上设有三个x向线性模组12,每个x向线性模组12上均安装有y向线性模组13,y向线性模组13上安装有z向线性模组14,位于龙门架11中部的z向线性模组14底部安装有砂带机15,另两个z向线性模组14底部安装有夹持机构16,夹持机构16采用气动抓手。
36.如图7,翻转组件22包括两个通过连杆连接的开槽支撑板223,开槽支撑板223为圆形,翻转机架221内侧设有对开槽支撑板223导向的光轮224,翻转机架221的上安装有翻转电机23,翻转电机23输出轴上的齿轮副222与其中一个开槽支撑板223边缘的齿槽啮合,开槽支撑板223上设有夹持限位机构21,夹持限位机构21包括开槽支撑板223矩形槽封闭端设有的气爪211,气爪211的两侧连接有手爪212,两个手爪212上与开槽支撑板223上横向导轨套接起到限位作用,通过气爪211的气缸推拉两个手爪212靠近或远离实现对矩形槽内工件的夹持或松开。
37.如图1、2和3,x向线性模组12包括固定于龙门架11上的x向导轨121和x向齿条122,x向导轨121上滑动套上固定有x向电机124,x向电机124输出轴的x向驱动齿轮123与x向齿条122啮合,通过x向电机124的x向驱动齿轮123转动可推动y向线性模组13沿x向导轨121运动。
38.如图2、3和4,y向线性模组13包括与x向导轨121套接的横梁131,横梁131上沿其长度方向设有y向导轨133和y向齿条134,z向模组14与y向导轨133套接,z向模组14上安装有y向电机132,y向电机132的连接轴上的y向驱动齿轮135与y向齿条134啮合,同理,通过y向电机132的y向驱动齿轮135转动可推动y向模组13沿x向导轨121运行。
39.如图5,z向线性模组14包括竖直机械臂141和通过滑块与y向导轨133套接的z向安装板142,z向安装板142上固定有三角筋板143,三角筋板143上下各设有两个,三角筋板143通过螺栓固定在z向安装板142上,三角筋板143上竖向开设有滑槽,竖直机械臂141上的竖向滑条144与滑槽滑动连接,三角筋板143上固定有z向电机145,z向电机145输出轴上的z向驱动齿轮146与竖直机械臂141上的z向齿条147啮合。
40.本设备的工作流程为:首先由人工将未打磨的新能源汽车进门踏板零件放置在传送机构3的踏板放置架32上,由安装在传送机架31上的传动电机提供动力带动链轮33进行旋转,链轮33带动链条34进行运动,链条34带动零件向前运动,当运动到传送机构3的末端后,由安装在龙门机器人1上左右两端的夹持机构16夹起放置到翻转机构2上,龙门机器人1两侧的夹持机构16可以进行x、y、z三个方向的移动,可以满足将零件从传送机构3搬运到翻转机构2上,随后由翻转机构2的夹持限位机构21夹紧工件,龙门机器人1中间的竖直机械臂141上安装砂带机15,砂带机15也可进行x、y、z三个方向的移动,当零件到达翻转机构2后砂带机15下降进行对零件的自动打磨,在打磨过程中翻转机构2由一端的翻转电机23带动翻转组件22的齿轮副222进行运动,齿轮副222带动零件进行角度调整,打磨结束后,砂带机15上升到安全位置,翻转机构2的夹持限位机构21松开,龙门机器人1上的夹持机构16下降夹起零件将零件放置到后端的传送机构3的踏板放置架32上,并将新的待打磨零件从前端的传送机构3取下后放置到翻转机构2上,打磨完成的零件由后端的传送机构3的踏板放置架32输送到传送机构3的末端后由人工取下,可以实现新能源汽车进门踏板的不间断打磨,自动化程度高,打磨效率高,节约了人力,保证了工作人员的生命健康安全。
41.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
42.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1