一种加泥机器人炮泥夹取方法及装置与流程
本发明属于工矿用智能机械设备领域,具体涉及一种加泥机器人炮泥夹取方法及装置。
背景技术:
1、宝钢3#高炉在工业智能化升级改造中首次采用了机器人来为泥炮加泥,这大大减轻了炉前生产操作工人的劳动强度,提高了高炉冶炼的作业效率,加泥机器人主要由6轴机器人、双驱动气缸及炮泥夹爪机构组成,炮泥夹爪机构安装在机器人第6轴的前端,可随机器人第6轴一起旋转和移动。当一框炮泥运抵指定位置后加泥机器人会自动测量泥炮框的位置及泥炮加泥口的位置,通过测量得到的数据可以计算出机器人第6轴的加泥移动轨迹,在程序的控制下机器人第6轴带动夹爪机构将炮泥夹爪插入到泥炮框内二并排摆放的炮泥间隙中,双驱动气缸一端进气,气缸活塞移动带动夹爪移动将炮泥紧紧夹住,机器人第6轴向上移动将炮泥提出泥框,机器人旋转将炮泥转运至泥炮加泥口上方,双驱动气缸另一端进气,夹爪在气缸带动下松开炮泥,炮泥下落进入到泥缸内,完成一次加泥动作,经过多次加泥动作后完成了泥炮的加泥工作。
2、而在现实实际应用中,一方面由于泥炮在加泥过程中会发生不规则的自转,从而导致机器人计算行程轨迹与实际行程轨迹发生无法预测的偏差,带来了加泥行程中的碰撞;另一方面,由于炮泥自身的空间位置并不总是完全垂直的,而是有不同程度的倾斜,也会导致竖直方向的碰撞;而诸上原因导致的诸如高炉泥炮加泥机器人在加泥过程中加泥机夹爪与泥炮框及炮泥相碰撞,诸如加泥机器人在日常使用中因遇到炮泥在泥框中摆放不规则,部分炮泥受重力影响发生变形带来的夹泥困难,以及夹爪与炮泥相撞的事故,使夹爪变形报废及气缸滑块报废,影响了机器人加泥作业和高炉正常生产。
3、申请号为:cn201610507918.4的发明申请,公开了“一种弹性夹爪装置”,包括翻转机构、气动弹性夹爪机构,翻转机构包括转轴、第一旋转机构,其中,第一旋转机构能实现安装于翻转气缸底座的转轴转动,气动弹性夹爪机构固定于转轴;气动弹性夹爪机构包括上夹钳、下夹钳,其中,下夹钳上方转动安装有若干上夹钳,导向块滑动连接于上夹钳内部凹槽,且导向块上固定导向轴,导向轴穿过上夹钳,导向轴外侧套装有弹簧,且弹簧两端分别支承于导向块的端面和上夹钳内部凹槽端面,第一移动机构固定于下夹钳后侧,第一移动机构用于推动导向块沿着上夹钳内部滑动实现将弹簧力压于上夹钳,从而将上夹钳压于下夹钳或远离下夹钳。
4、申请号为:cn 202210597859.x的发明申请,公开了“一种泡泥包装生产用倾斜交叉式抓取装置”,包括装箱平台、机械抓手、转移输送带和泡泥传送带,机械抓手设置在装箱平台的上方,泡泥传送带与转移输送带交叉设置,机械抓手将泡泥传送带的泡泥块移动到装箱平台的上方,方便泡泥块在装箱平台装箱之后从转移输送带输送走,机械抓手包括两个倾斜设置且相互交叉的插杆,两个交叉的插杆互不接触,装箱平台上设置有用于承接泡泥块的包装纸箱和携带包装纸箱在转移输送带移动的输送托盘,装箱平台上设置有限制输送托盘位置的水平定位机构。
技术实现思路
1、为解决以上问题,本发明提供了一种加泥机器人炮泥夹取方法及装置,其技术方案具体如下:
2、一种加泥机器人炮泥夹取方法,其特征在于:
3、通过设置的加泥机器人及设于机器人轴前端的夹取装置,根据计算的加泥移动轨迹,以行程路径中建立的碰撞避让完成对炮泥的夹取。
4、根据本发明的一种加泥机器人炮泥夹取方法,其特征在于:
5、所述碰撞避让包括:水平方向的碰撞避让与竖直方向的碰撞避让。
6、根据本发明的一种加泥机器人炮泥夹取方法,其特征在于:
7、所述的碰撞避让为碰撞后避让,通过对夹取装置的设置建立以碰撞为触发动作的避让。
8、根据本发明的一种加泥机器人炮泥夹取方法,其特征在于:
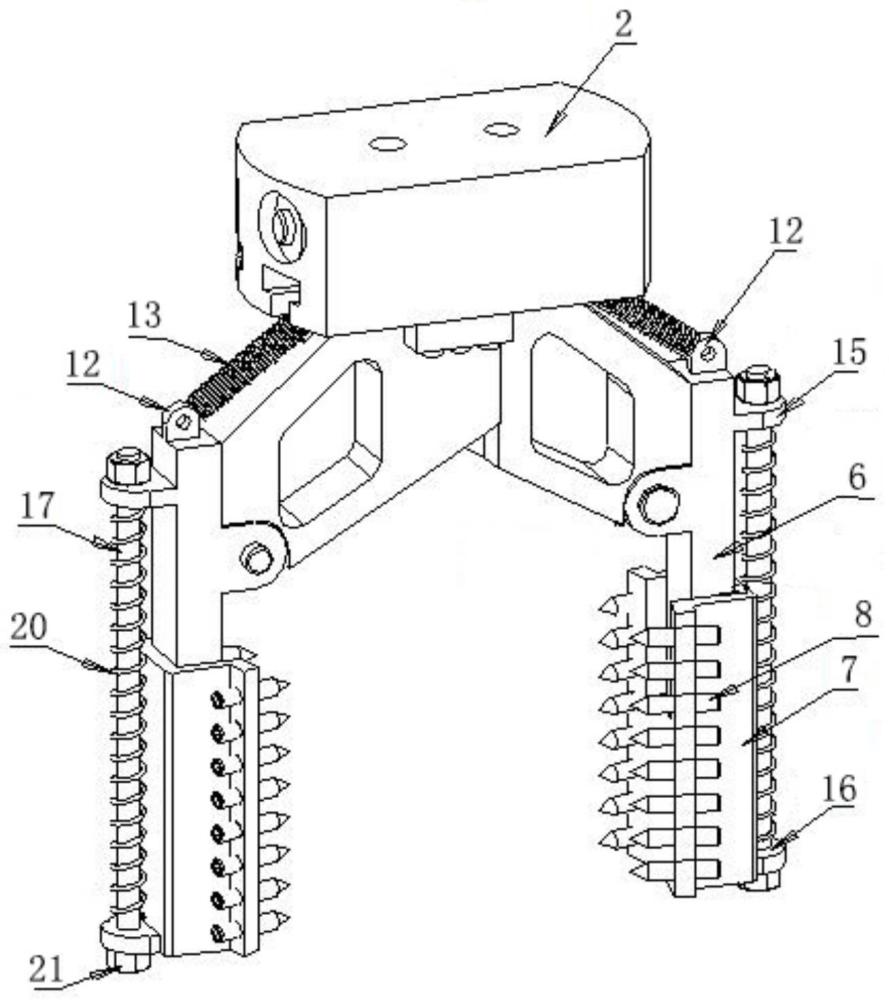
9、所述夹取装置包括有与机器人轴前端固接的底盘(1),封装于底盘内的双驱动气缸(2)及与各气缸活塞杆连接、并被各气缸活塞杆驱动建立可避让式的夹紧与释放的夹爪机构。
10、根据本发明的一种加泥机器人炮泥夹取方法,其特征在于:
11、所述夹爪机构包括有:
12、于气缸本体上、与各活塞杆的行程位置平行的位置开设的十字形滑槽(3),
13、设于十字形滑槽(3)内的t型滑块(4),
14、与t型滑块(4)固接的驱动块(5),
15、与驱动块(5)连接的活动杆(6),
16、与活动杆(6)连接的夹爪板(7)及对称布设于夹爪板(7)上的爪钉(8);
17、通过将t型滑块(4)与活塞杆(18)的端部固接,形成t型滑块随活塞杆的运动而同步平行位移;
18、所述驱动块连接在t型滑块(4)与活动杆(6)之间,用于将t型滑块的水平左右移动转换成呈垂直于水平面布设的活动杆(6)的水平方向的往复直线运动;通过两根活动杆的水平方向的往复直线运动建立夹爪机构的夹紧与释放;
19、于驱动块的一端设有水平凸台(22),所述水平凸台用于与t型滑块(4)固接;
20、于驱动块的另一端设有第一连接耳板(9),用于与活动杆(6)销接;
21、于驱动块上,由靠近t型滑块(4)的一端延伸向与活动杆连接的一端的方向上,形成有一个斜坡面(10);
22、于该斜坡面(10)上、靠近t型滑块(4)的一端固设弹簧连接耳板(11),于活动杆(6)的顶端端面上固设弹簧连接座(12),于弹簧连接耳板(11)与弹簧连接座(12)之间设置拉伸弹簧(13),
23、于活动杆(6)杆身的侧面、与驱动块(5)的销接适配位设置第二连接耳板(14);
24、所述第二连接耳板(14)与第一连接耳板(9)销接;
25、通过设置在弹簧连接耳板(11)与弹簧连接座(12)的弹簧设置,配合第一连接耳板(9)与第二连接耳板(14)的销接,建立在发生水平方向碰撞后的活动杆(6)以第一连接耳板(9)与第二连接耳板(14)重合的消栓孔为绕点,第一连接耳板(9)与第二连接耳板(14)重合的消栓孔与弹簧连接座(12)的连线为摆线的绕点摆动,建立水平方向碰撞后的避让;
26、在发生竖直方向的碰撞后,所述夹爪板(7)以可被驱动与活动杆(6)产生相对运动的方式形成碰撞后的避让。
27、根据本发明的一种加泥机器人炮泥夹取方法,其特征在于:
28、于活动杆(6)杆身、与设置第二连接耳板(14)相背的侧面设置弹簧定位座(15),
29、所述夹爪板(7)套箍于活动杆(6),于夹爪板(7)上、在夹爪板套箍于活动杆(6)后与弹簧定位座(15)在竖直方向同轴的位置、设有限位板(16);
30、于弹簧定位座(15)及限位板(16)上分别开设通孔,于通孔内设置定位连杆(17)用于连接活动杆(6)与夹爪板(7);于定位连杆的上下两端均设有防松螺母;
31、于弹簧定位座(15)的下端面与限位板(16)的上端面之间设置压缩弹簧、所述压缩弹簧呈套设于定位连杆(17)设置。
32、一种加泥机器人炮泥夹取装置,其特征在于:
33、所述夹取装置包括有与机器人轴前端固接的底盘(1),封装于底盘内的双驱动气缸(2)及与各气缸活塞杆连接、并被各气缸活塞杆驱动建立碰撞避让式的夹紧与释放的夹爪机构。
34、根据本发明的一种加泥机器人炮泥夹取装置,其特征在于:
35、所述夹爪机构包括有:
36、于气缸本体上、与各活塞杆的行程位置平行的位置开设的十字形滑槽(3),
37、设于十字形滑槽(3)内的t型滑块(4),
38、与t型滑块(4)固接的驱动块(5),
39、与驱动块(5)连接的活动杆(6),
40、与活动杆(6)连接的夹爪板(7)及对称布设于夹爪板(7)上的爪钉(8);
41、通过将t型滑块(4)与活塞杆(18)的端部固接,形成t型滑块随活塞杆的运动而同步平行位移;
42、所述驱动块连接在t型滑块(4)与活动杆(6)之间,用于将t型滑块的水平左右移动转换成呈垂直于水平面布设的活动杆(6)的水平方向的往复直线运动;通过两根活动杆的水平方向的往复直线运动建立夹爪机构的夹紧与释放;
43、于驱动块的一端设有水平凸台(22),所述水平凸台用于与t型滑块(4)固接;
44、于驱动块的另一端设有第一连接耳板(9),用于与活动杆(6)销接;
45、于驱动块上,由靠近t型滑块(4)的一端延伸向与活动杆连接的一端的方向上,形成有一个斜坡面(10);
46、于该斜坡面(10)上、靠近t型滑块(4)的一端固设弹簧连接耳板(11),于活动杆(6)的顶端端面上固设弹簧连接座(12),于弹簧连接耳板(11)与弹簧连接座(12)之间设置拉伸弹簧(13),
47、于活动杆(6)杆身的侧面、与驱动块(5)的销接适配位设置第二连接耳板(14);
48、所述第二连接耳板(14)与第一连接耳板(9)销接;
49、通过设置在弹簧连接耳板(11)与弹簧连接座(12)的弹簧设置,配合第一连接耳板(9)与第二连接耳板(14)的销接,建立在发生水平方向碰撞后的活动杆(6)以第一连接耳板(9)与第二连接耳板(14)重合的消栓孔为绕点,第一连接耳板(9)与第二连接耳板(14)重合的消栓孔与弹簧连接座(12)的连线为摆线的绕点摆动,建立水平方向碰撞后的避让;
50、在发生竖直方向的碰撞后,所述夹爪板(7)以可被驱动与活动杆(6)产生相对运动的方式形成碰撞后的避让。
51、根据本发明的一种加泥机器人炮泥夹取装置,其特征在于:
52、于活动杆(6)杆身、与设置第二连接耳板(14)相背的侧面设置弹簧定位座(15),
53、所述夹爪板(7)套箍于活动杆(6),于夹爪板(7)上、在夹爪板套箍于活动杆(6)后与弹簧定位座(15)在竖直方向同轴的位置、设有限位板(16);
54、于弹簧定位座(15)及限位板(16)上分别开设通孔,于通孔内设置定位连杆(17)用于连接活动杆(6)与夹爪板(7);于定位连杆的上下两端均设有防松螺母;
55、于弹簧定位座(15)的下端面与限位板(16)的上端面之间设置压缩弹簧、所述压缩弹簧呈套设于定位连杆(17)设置。
56、本发明的一种加泥机器人炮泥夹取方法及装置,通过在现有机器人的基础上,通过对夹取装置的机械结构设置改造,能够很好地适配实际工况下的水平碰撞避让与竖直碰撞避让,且整个结构紧凑巧妙,避免了复杂的轨迹计算的复杂性很好地解决了轨迹计算与各种不同实际的适配性的通用性之间的矛盾;使得设备在具体工作时能够延长使用寿命。
- 还没有人留言评论。精彩留言会获得点赞!