一种适用于铸铁机的脱模装置的制作方法
1.本实用新型涉及一种脱模装置,特别是一种能够使铸铁机模具上的铸铁脱落的装置,属于冶金设备技术领域。
背景技术:
2.铸铁机是一种浇铸生铁块的设备,它由装有一系列铸型的循环链带组成,铁液在一端逐一注入运行中的铸型,在铸型运行途中冷却,在到达铸铁机尾部作反向运动时,凝固的铁块自动从铸型脱落;在铸铁作业的过程中,铁水通过分流槽注入铸模链带,经过喷淋冷却后脱模进入接铁槽,由于铁水流速波动、冷热应力变化等原因,导致铁块粘在模具上无法通过自重脱落;没有成功脱落铁块的模具在循环回来后继续浇筑会导致铁水外溢,增大了安全隐患,造成了不必要的浪费;目前,对于铁块粘附在模具的情况,解决办法是通过人工手持大锤对各个铁块进行敲打,将其敲松,从而使铁块成功脱落;这种人工敲打的方法效率低下,而且工作人员的劳动强度极大;故需要一种脱模装置,要求它能够确保铁块成功从模具上脱落。
技术实现要素:
3.本实用新型的目的在于克服现有技术的不足,提供一种适用于铸铁机的脱模装置,它不仅能够降低工作人员的劳动强度,还能够提高铁块脱模效率。
4.本实用新型所述问题是通过以下技术方案解决的:
5.一种适用于铸铁机的脱模装置,铸铁机末端设置有星型大齿轮,星型大齿轮的两端设置有轴承座,轴承座设置在支撑支架上;包括落铁感应机构、转动机构、吸铁机构、plc和定位机构;所述落铁感应机构和转动机构均设置在支撑支架上;所述吸铁机构设置在转动机构上;所述定位机构设置在支撑支架和吸铁机构上;所述转动机构包括驱动电机和转轴;所述转轴的两端分别轴接在两侧支撑支架的内壁上;所述驱动电机的壳体设置在支撑支架的外壁上,且驱动电机的输出轴穿设支撑支架的侧壁与转轴的一端连接;所述驱动电机的信号控制端连接plc的信号输出端。
6.上述适用于铸铁机的脱模装置,所述吸铁机构包括连接杆、连接板、电磁铁和距离传感器;所述连接杆的数量为两个,且其对立设置在转轴的两端;所述连接板设置在两侧的连接杆之间;所述电磁铁和距离传感器设置在连接板的同一端面上,且距离传感器相比电磁铁更靠近转轴;所述距离传感器的信号输出端连接plc的信号输入端;所述电磁铁的信号控制端连接plc的信号输出端。
7.上述适用于铸铁机的脱模装置,所述落铁感应机构包括横杆和接近开关;所述横杆设置在支撑支架侧壁上,且横杆的中心线与转轴的轴心线相互垂直;所述接近开关设置在横杆远离支撑支架的一端上;所述接近开关的信号输出端连接plc的信号输入端。
8.上述适用于铸铁机的脱模装置,所述定位机构包括第一磁感应开关、第二磁感应开关和磁块;所述第一磁感应开关和第二磁感应开关设置在同一个支撑支架的内壁上;所
述磁块设置在连接杆的外壁上;所述磁块与转轴的轴心线之间的距离等于第一磁感应开关与转轴的轴心线之间的距离,第一磁感应开关与转轴的轴心线之间的距离等于第二磁感应开关与转轴的轴心线之间的距离;所述第一磁感应开关与第二磁感应开关的信号输出端连接plc的信号输入端。
9.上述适用于铸铁机的脱模装置,增设有环形金属垫;所述环形金属垫设置在电磁铁远离连接板的端面上。
10.本实用新型通过落铁感应机构有效地判断铸铁是否成功从模具上脱落;本新型通过吸铁机构和转动机构的配合,将粘附在模具上脱落不下来的铸铁脱下,从而避免未脱落的铸铁随着模具进入下一个循环影响生产作业。
附图说明
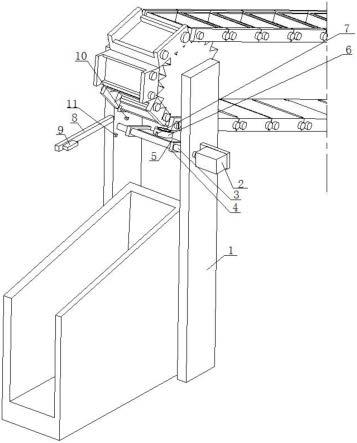
11.图1为本实用新型使用状态立体结构示意图;
12.图2为本实用新型俯角立体结构示意图。
13.图中各标号清单为:1.支撑支架,2.驱动电机,3.转轴,4.连接杆,5. 连接板,6.电磁铁,7.距离传感器,8.横杆,9.接近开关,10.第一磁感应开关,11.第二磁感应开关,12.磁块,13.环形金属垫。
具体实施方式
14.参看图1和图2,本实用新型包括铸铁机上装设有铁模和链板的循环链带,在远离浇筑点的一端,也就是铸铁机的末端设置有星型大齿轮,星型大齿轮的两端设置有轴承座,轴承座设置在支撑支架1上;铁模内的铁块在经过末端星型大齿轮时会自动脱落;个别时候铁块会粘附在铁模上无法脱落。
15.本新型包括落铁感应机构、转动机构、吸铁机构、plc和定位机构;所述落铁感应机构和转动机构均设置在支撑支架1上;落铁感应机构的作用在于感应铁块是否成功从铁模上掉落;转动机构的作用在于,带动吸铁机构靠近铁块,将铁块吸下来后扔入下方容纳铁块的斗内;所述吸铁机构设置在转动机构上;吸铁机构用于将吸附在铁模上的铁块吸下来;所述定位机构设置在支撑支架1和吸铁机构上;定位机构用于辅助转动机构移动到位,确保吸铁机构能够顺利将吸下来的铁块扔入容纳铁块的斗内。
16.所述转动机构包括驱动电机2和转轴3;所述转轴3的两端分别轴接在两侧支撑支架1的内壁上;所述驱动电机2的壳体设置在支撑支架1的外壁上,且驱动电机2的输出轴穿设支撑支架1的侧壁与转轴3的一端连接;通过驱动电机2的动作,带动转轴3旋转,通过转轴3的旋转,带动电磁铁6靠近或远离铁块。
17.所述吸铁机构包括连接杆4、连接板5、电磁铁6和距离传感器7;所述连接杆4的数量为两个,且其对立设置在转轴3的两端;所述连接板5设置在两侧的连接杆4之间;所述电磁铁6和距离传感器7设置在连接板5的同一端面上,且距离传感器7相比电磁铁6更靠近转轴3;所述驱动电机2和电磁铁6的信号控制端连接plc的信号输出端;所述距离传感器7的信号输出端连接plc的信号输入端。
18.所述落铁感应机构包括横杆8和接近开关9;所述横杆8设置在支撑支架 1侧壁上,且横杆8的中心线与转轴3的轴心线相互垂直;所述接近开关9设置在横杆8远离支撑支架1
的一端上;所述接近开关9的信号输出端连接plc 的信号输入端;当铁模上的铁块掉落时,会被接近开关9感应到有物体经过;因为铸铁机传送铁块的速度是稳定的,所以铁块的掉落速度也是稳定的,如果接近开关9在上一块铁块掉落后的正常时间范围内没有感应到有铁块掉落,说明有铁块粘在了铁模上。
19.所述定位机构包括第一磁感应开关10、第二磁感应开关11和磁块12;所述第一磁感应开关10和第二磁感应开关11设置在同一个支撑支架1的内壁上;所述磁块12设置在连接杆4的外壁上;所述磁块12与转轴3的轴心线之间的距离等于第一磁感应开关10与转轴3的轴心线之间的距离,第一磁感应开关10与转轴3的轴心线之间的距离等于第二磁感应开关11与转轴3 的轴心线之间的距离;所述第一磁感应开关10与第二磁感应开关11的信号输出端连接plc的信号输入端;第一感应开关10感应到磁块时,此时电磁铁 6的位置恰好和铁块接触;第二感应开关11感应到磁块时,此时电磁铁6的位置恰好位于容纳铁块的斗正上方。
20.为了防止电磁铁6与铁块的接触加速电磁铁6的损坏,增设有环形金属垫13;所述环形金属垫13设置在电磁铁6远离连接板5的端面上;环形金属垫13与铁块直接接触,不再需要电磁铁6与铁块直接接触,延长了电磁铁6 的使用寿命。
21.实际使用过程:铸铁机传送速度恒定,铁块掉落速度稳定,上一个铁块掉落后在正常时间范围内没有铁块掉落说明有铁块发生了黏连;距离传感器7 启动,因为各个铁模的形状相同,所以当一个个铁模经过距离传感器7时,距离传感器7感应到的距离是周期性变化的,一旦发现距离异常近,说明有铁块,驱动电机2动作,直至磁块12被第一磁感应开关10感应到,此时电磁铁6通电,将铁块吸下来,然后驱动电机2反转,直至磁块12被第二磁感应开关11感应到,电磁铁6此时断电,此时铁块掉入容纳铁块的斗内,至此铁块清除作业完毕。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1