一种医用缝合针超声波钻削装置的制作方法
1.本实用新型属于医疗器械生产制造领域,具体涉及一种医用缝合针超声波钻削装置。
背景技术:
2.超声加工是利用超声频作小振幅振动的工具,并通过它与工件之间游离于液体中的磨料对被加工表面的捶击作用,使工件材料表面逐步破碎的特种加工,英文简称为usm。超声加工常用于穿孔、切割、焊接、套料和抛光。
3.目前超声波钻削装置已经被应用于医用缝合针打孔,使打孔质量得到了提升。现有超声波钻削装置的问题在于:缝合针打孔后可能会出现打偏打歪的情况,产生次品,现有技术是通过人工将次品剔除,耗费人力,效率不够高。
技术实现要素:
4.为了弥补现有技术的不足,本实用新型提供一种医用缝合针超声波钻削装置的技术方案。
5.一种医用缝合针超声波钻削装置,包括:
6.传送组件,所述传送组件包括链条机构,所述链条机构的每个链块上设置针板,所述针板用以定位缝合针;
7.超声波钻削机,所述超声波钻削机用以对经过的针板上的缝合针进行打孔;
8.压料机构,所述压料机构用以对经过的针板上的缝合针进行压紧,以配合超声波钻削机的打孔工作;
9.工业摄像头,所述工业摄像头用以对打孔后的缝合针进行拍照,以判断缝合针的打孔质量;以及
10.下料机械手,所述下料机械手用以实现缝合针的下料,并对缝合针进行分拣。
11.进一步地,所述针板上表面具有连通的定位针槽和打孔凹槽,所述定位针槽用以放置和定位缝合针,所述打孔凹槽的宽度和深度均大于定位针槽,其与缝合针的端部相对应。
12.进一步地,所述压料机构包括压板和用以驱动压板升降的升降驱动器。
13.进一步地,所述压板的下侧具有v形压槽。
14.进一步地,所述下料机械手包括电磁吸杆、升降驱动机构和横移驱动机构,所述电磁吸杆用以抓取缝合针,所述升降驱动机构用以驱动电磁吸杆升降,所述横移驱动机构用以驱动电磁吸杆横移。
15.进一步地,所述横移驱动机构横向布置,其输出端连接安装座,所述升降驱动机构设置于安装座,升降驱动机构的输出端与电磁吸杆连接。
16.进一步地,所述升降驱动机构为气缸,所述横移驱动机构为滑台。
17.与现有技术相比,本实用新型的有益效果在于:
18.1)本实用新型设置了传送组件、超声波钻削机、压料机构、工业摄像头、下料机械手等结构,能够进行自动打孔、检测、分拣等工作,帮助剔除次品,效果好,效率高;
19.2)本实用新型通过压料机构对缝合针进行压紧,使缝合针保持稳定;使钻孔工作更加顺利;
20.3)本实用新型通过工业摄像头对缝合针的打孔质量进行检测,配合下料机械手对缝合针进行分拣,完全代替了人工验料和分拣的工作,能够节省人力。
附图说明
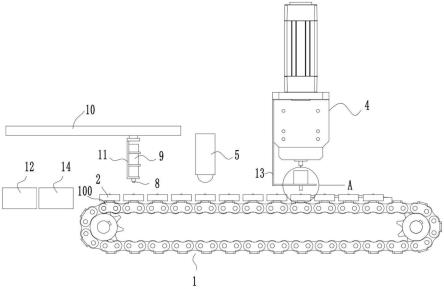
21.图1为本实用新型结构示意图;
22.图2为图1中a处放大图;
23.图3为本实用新型中针板与缝合针连接的俯视结构示意图;
24.图4为本实用新型中针板、压板及超声波钻削机的钻削头位置关系示意图;
25.图5为本实用新型中下料机械手结构示意图。
具体实施方式
26.在本实用新型的描述中,需要理解的是,术语“一端”、“另一端”、“外侧”、“上”、“内侧”、“水平”、“同轴”、“中央”、“端部”、“长度”、“外端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
27.下面结合附图对本实用新型作进一步说明。
28.请参阅图1-5,一种医用缝合针超声波钻削装置,包括传送组件、超声波钻削机4、压料机构、工业摄像头5、下料机械手、集料盒14及剔料盒12,超声波钻削机4、工业摄像头5、下料机械手、集料盒14及剔料盒12自前向后依次设置,压料机构与超声波钻削机4并排设置。
29.继续参阅图1和图3,传送组件包括链条机构1,链条机构1的每个链块100上设置针板2,针板2会随链条一起移动,针板2用以定位缝合针3,其上表面具有连通的定位针槽和打孔凹槽200,定位针槽用以放置和定位缝合针3,打孔凹槽200的宽度和深度均大于定位针槽,打孔凹槽200与缝合针3的端部相对应,为打孔留出空间,避免针板2被打穿。
30.其中,链条机构1本身的结构为公知技术,包括链条、主动链轮、从动链轮、电机等。链条机构1采用间歇性运动,以配合打孔工作。
31.继续参阅图1,超声波钻削机4用以对经过的针板2上的缝合针3进行打孔,超声波钻削机4的结构为公知技术,其具有钻削头400。
32.继续参阅图1和图2,压料机构用以对经过的针板2上的缝合针3进行压紧,使缝合针3保持稳定,以配合超声波钻削机4的打孔工作,其包括压板6和用以驱动压板6升降的升降驱动器7,压板6的下侧具有与缝合针3形状匹配的v形压槽600,v形压槽600能够自动定心。
33.具体地,超声波钻削机4的安装架连接器安装板13,升降驱动器7安装于安装板13上,升降驱动器7优选为气缸,此外也可以采用电缸等,升降驱动器7的输出轴与压板6连接。
34.如图4所示,压料机构的位置与超声波钻削机4的钻削头400的位置避开,压料机构的压板6仅压住缝合针3的一半即可,这样可以防止发生干涉。
35.继续参阅图1,工业摄像头5用以对打孔后的缝合针3进行拍照,工业摄像头5可以配备补光灯等结构,其将拍摄的照片传输给电脑,利用电脑上的视觉检测软件对照片进行分析,以判断缝合针3的打孔质量。
36.继续参阅图5,所述下料机械手用以实现缝合针3的下料,并对缝合针3进行分拣,其包括电磁吸杆8、升降驱动机构9和横移驱动机构10,电磁吸杆8用以抓取缝合针3,升降驱动机构9用以驱动电磁吸杆8升降,横移驱动机构10用以驱动电磁吸杆8横移。通电时,电磁吸杆8能够通过磁力对缝合针3进行抓取,断电时,电磁吸杆8会放下缝合针3。电磁吸杆8通过升降驱动机构9和横移驱动机构10实现自身的升降横移,进而对针板2上的缝合针3进行抓取,并将打孔质量合格的缝合针3放入集料盒14,将不合格的缝合针3放入剔料盒12。
37.具体地,横移驱动机构10横向布置,其输出端连接安装座11,升降驱动机构9设置于安装座11,升降驱动机构9的输出端与电磁吸杆8连接。
38.其中,升降驱动机构9优选为气缸,此外也可以采用电缸等结构,横移驱动机构10优选为滑台,此外也可以采用其它驱动结构。
39.工作过程:
40.在超声波钻削机4的前方的上料工位通过人工或机械手往针板2上放置缝合针3,当针板2来到打孔工位时,压料机构对针板2上的缝合针3进行压紧,然后超声波钻削机4进行打孔,打孔后该针板2来到检测工位,通过工业摄像头5采集缝合针3的图像,判断打孔质量,之后针板2来到下料工位,通过下料机械手将合格的缝合针3放入集料盒14,将不合格的缝合针3放入剔料盒12。
41.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1