一种工字轮清磨装置的制作方法
1.本实用新型涉及一种清磨设备,特别涉及一种工字轮清磨装置。
背景技术:
2.工字轮是中间为圆筒形的主体,主体的顶面和底面凸出圆边的金属铸件。为了消除工字轮主体表面的毛刺,通常采用人工手持清磨设备去剔除。然而,采取人工手持清磨设备的方式,费时费力,自动化程度低。
技术实现要素:
3.本实用新型要解决的技术问题是采取人工手持清磨设备的方式,费时费力,自动化程度低,为此提供一种工字轮清磨装置。
4.本实用新型解决其技术问题所采用的技术方案是:
5.一种工字轮清磨装置,包括:机架、推动机构、打磨机构和支撑机构,所述推动机构设于所述机架上;所述打磨机构设于所述机架上,并位于所述推动机构的一侧;所述支撑机构包括导轨ⅰ和导轨ⅱ,所述导轨ⅰ安装于所述机架上,所述导轨ⅱ安装于所述机架上,并与所述导轨ⅰ间隔设置。
6.进一步,所述机架上设有清理机构,所述清理机构与所述打磨机构位于所述推动机构的同侧。
7.进一步,所述推动机构包括:推动组件ⅰ和推动组件ⅱ,所述推动组件ⅰ与所述推动组件ⅱ相互平行设置;所述推动组件ⅱ包括驱动气缸ⅱ和单向折叠推板,所述驱动气缸ⅱ与所述单向折叠推板连接。
8.进一步,所述机架上设有控制器、激光对射传感开关和感应开关,所述控制器设于所述机架上,并分别与所述激光对射传感开关、所述感应开关、所述推动机构和所述打磨机构电连接;所述激光对射传感开关设于机架上;所述感应开关设于所述推动机构上。
9.进一步,所述机架上设置的连轴器,所述打磨机构包括驱动装置ⅰ、支架组件和清磨轮,所述驱动装置ⅰ与所述支架组件连接;所述支架组件与所述连轴器可转动连接;所述清磨轮与所述支架组件连接。
10.进一步,所述支架组件包括支架ⅰ和支架ⅱ,所述清磨轮包括轮体ⅰ、轮体ⅱ和轮体ⅲ,所述支架ⅰ与所述轮体ⅰ连接,所述轮体ⅱ和所述轮体ⅲ分别与所述支架ⅱ连接。
11.进一步,所述机架上设有与所述支撑机构连接的转动装置,所述转动装置包括传输带和驱动装置ⅱ,所述驱动装置ⅱ的输出轴、所述导轨ⅰ和所述导轨ⅱ呈三角形分布,所述传输带套设于所述驱动装置ⅱ、所述导轨ⅰ和所述导轨ⅱ。
12.进一步,所述清理机构包括:支架、传动轴、刷毛、驱动装置ⅲ和传动带,所述支架设于所述机架上,所述传动轴与所述支架可转动连接,并通过所述传动带与所述驱动装置ⅲ连接;所述刷毛设于所述传动轴上。
13.进一步,所述单向折叠推板包括:固定部和弯折部,所述固定部靠近所述弯折部的
一端面凹入形成凹槽,所述凹槽的一侧设有挡板;所述弯折部靠近所述固定部的一端设有安装部,所述安装部上套设有扭簧。
14.进一步,所述机架上设有护罩,所述推动机构、所述打磨机构和所述清理机构位于所述护罩内。
15.本实用新型之工字轮清磨装置具有如下优点:
①
通过推动机构推动工字轮在支撑机构上运动,直至工字轮进入打磨工位,接下来控制打磨机构对进入打磨工位的工字轮进行打磨操作,省时省力,自动化程度高;
16.②
清理机构能够与工字轮接触,以消除粘附于工字轮外表面的残存碎屑;
17.③
通过设置推动组件ⅰ和推动组件ⅱ,推动组件ⅰ与推动组件ⅱ相互平行设置,这样能够通过推动组件ⅰ将工字轮送入打磨工位,通过推动组件ⅱ将工字轮送入清理工位。通过设置单向折叠推板,在被带动在第二方向运动时,单向折叠推板能够向第一方向弯折,藉由此由工字轮的下方通过工字轮,而且,在被带动沿第一方向运动时,可实现推动工字轮进入清理工位。
附图说明
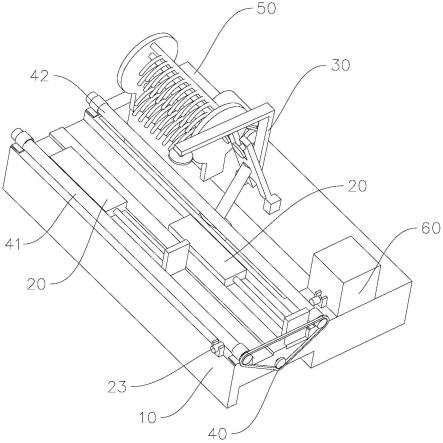
18.图1为本实用新型的一实施例的工字轮清磨装置的结构示意图;
19.图2为图1所示的工字轮清磨装置的俯视图;
20.图3至图7为图1所示的工字轮清磨装置工作过程的示意图;
21.图8为图1所示的工字轮清磨装置的原理框图;
22.图9为图1所示的工字轮清磨装置的机架的结构示意图;
23.图10为图1所示的工字轮清磨装置的推动机构的结构示意图;
24.图11为图10中推板组件的结构示意图;
25.图12为图10所示的推板组件的分解结构示意图;
26.图13为图1所示的工字轮清磨装置的打磨机构的结构示意图;
27.图14为图1所示的工字轮清磨装置的支撑机构的结构示意图;
28.图15为图1所示的工字轮清磨装置的清理机构的结构示意图;
29.图16为图1所示的工字轮清磨装置盖有护罩的结构示意图。
30.图中:10-机架;11-导槽;12-固定件;13-穿孔;14-气缸固定座;
31.20-推动机构;21-推动组件ⅰ;211-驱动气缸ⅰ;212-推板;22-推动组件ⅱ;221-驱动气缸ⅱ;222-单向折叠推板;2221-固定部;2222-弯折部;2223-槽体;2224-挡板;2225-安装部;23-激光对射传感开关;24-感应开关;
32.30-打磨机构;31-驱动装置ⅰ;32-支架组件;321-支架ⅰ;322-支架ⅱ;33-清磨轮;331-轮体ⅰ;332-轮体ⅱ;333-轮体ⅲ;
33.40-支撑机构;41-导轨ⅰ;42-导轨ⅱ;43-传输带;44-驱动装置ⅱ;
34.50-清理机构;51-支架;52-传动轴;53-刷毛;54-驱动装置ⅲ;55-传动带;
35.60-控制器;
36.70-护罩;
37.80-工字轮。
具体实施方式
38.以下结合附图及实施例对本实用新型作进一步说明。
39.本实施例提供一种工字轮自动清磨装置,不仅能够清磨工字轮,而且能够清磨圆筒或圆柱形的工件。
40.参照附图1和图2,工字轮自动清磨装置包括:机架10、推动机构20、打磨机构30和支撑机构40,推动机构20设于机架10上;打磨机构30设于机架10上,并位于推动机构20的一侧;支撑机构40包括导轨ⅰ41和导轨ⅱ42,导轨ⅰ41安装于机架10上,导轨ⅱ42安装于机架10上,并与导轨ⅰ41间隔设置。
41.其中,工字轮80位于导轨ⅰ41和导轨ⅱ42之间。
42.本实施例中,通过推动机构20推动工字轮80在支撑机构40上运动,直至工字轮80进入打磨工位,从而控制打磨机构30对进入打磨工位的工字轮80进行打磨操作,省时省力,自动化程度高。
43.机架10上设有清理机构50,清理机构50与打磨机构30位于推动机构20的同侧。
44.其中,机架10上设有打磨工位和清理工位,打磨工位与打磨机构30对应设置,清理工位与清理机构50对应设置。
45.本实施例中,清理机构50能够与工字轮80接触,以消除粘附于工字轮80外表面的残存碎屑。
46.参照图10所示,推动机构20包括:推动组件ⅰ21和推动组件ⅱ22,推动组件ⅰ21与推动组件ⅱ22相互平行设置;推动组件ⅱ22包括驱动气缸ⅱ221和单向折叠推板222,驱动气缸ⅱ221与单向折叠推板222连接。
47.参照图3所示,推动机构20向第一方向(图中箭头所示)和与第一方向相反的第二方向直线往返运动,用于推动工字轮80向第一方向(图中箭头所示)直线运动。
48.其中,推动组件ⅰ21包括驱动气缸ⅰ211和连接于驱动气缸ⅰ211输出轴的推板212。驱动气缸ⅰ211驱动推板212直线往返运动。推动组件ⅱ22包括驱动气缸ⅱ221和与驱动气缸ⅱ221连接的单向折叠推板222,驱动气缸ⅱ221带动单向折叠推板222直线往返运动。
49.本实施例中,通过设置推动组件ⅰ21和推动组件ⅱ22,推动组件ⅰ21与推动组件ⅱ22相互平行设置,这样能够通过推动组件ⅰ21将工字轮80送入打磨工位,通过推动组件ⅱ22将工字轮80送入清理工位。通过设置单向折叠推板222,在被带动在第二方向运动时,单向折叠推板222能够向第一方向弯折,藉由此由工字轮80的下方通过工字轮80,而且,在被带动沿第一方向运动时,可实现推动工字轮80进入清理工位。
50.参照附图8、图9和图10,机架10上设有控制器60、激光对射传感开关23和感应开关24,控制器60设于机架10上,并分别与激光对射传感开关23、感应开关24、推动机构20和打磨机构30电连接;激光对射传感开关23设于机架10上;感应开关设于推动机构上。
51.其中,激光对射传感开关23配置为当对射信号被阻断时,向控制器60发送第一信号,控制器60根据第一信号控制推动机构20向第一方向运动,以推动工字轮80进入打磨工位。感应开关24被配置为当感应到工字轮80靠近时,向控制器60发送第二信号,控制器60根据第二信号控制推动机构20向第二方向运动,并且控制打磨机构30对进入打磨工位的工字轮80进行打磨操作。
52.本实施例中,通过设置控制器60、激光对射传感开关23和感应开关24,控制器60分
别与激光对射传感开关23、感应开关24、推动机构20和打磨机构30电连接,以实现对推动机构20和打磨机构30的控制,自动化程度高。
53.参照图9和图13所示,机架10上设置的连轴器,打磨机构30包括驱动装置ⅰ31、支架组件32和清磨轮33,驱动装置ⅰ31与支架组件32连接;支架组件32与连轴器可转动连接;清磨轮33与支架组件连接32。
54.其中,驱动装置ⅰ31为伸缩气缸。参照图5所示,工字轮80位于打磨工位,清磨轮33未与工字轮80接触。参照图6所示,当感应开关24检测到工字轮80位于打磨工位时,伸缩气缸缩短活塞杆,以驱动支架组件32顺时针转动,以带动清磨轮33与工字轮80接触,进行清磨操作。当预设时间后,伸缩气缸拉长活塞杆,以驱动支架组件32逆时针转动,以带动清磨轮33远离工字轮80。
55.预设时间配置为从推动机构20推动工字轮80进入打磨工位,至推动工字轮80离开打磨工位的时间。
56.本实施例中,通过设置驱动装置ⅰ31、支架组件32和清磨轮33,这样能够通过控制驱动装置ⅰ31驱动支架组件32转动,从而带动清磨轮33接触工字轮80或远离工字轮80,自动化程度高。
57.参照图13所示,支架组件32包括支架ⅰ321和支架ⅱ322,清磨轮33包括轮体ⅰ331、轮体ⅱ332和轮体ⅲ333,支架ⅰ321与轮体ⅰ331连接,轮体ⅱ332和轮体ⅲ333分别与支架ⅱ322连接。
58.本实施例中,通过设置轮体ⅰ331、轮体ⅱ332和轮体ⅲ333,以对工字轮80的多个位置进行打磨操作,以提高打磨效率。
59.参照图14所示,机架10上设有与支撑机构40连接的转动装置,转动装置包括传输带43和驱动装置ⅱ44,驱动装置ⅱ44的输出轴、导轨ⅰ41和导轨ⅱ42共同呈三角形分布,传输带43套设于驱动装置ⅱ44、述导轨ⅰ41和导轨ⅱ42。
60.其中,机架10上设有固定架(图中未示出),驱动装置ⅱ44通过固定架安装于机架10的底部。
61.本实施例中,通过驱动装置ⅱ44的输出轴、导轨ⅰ41和导轨ⅱ42共同呈三角形分布,三角形分布稳定可靠,传输带43在工作过程中不易脱落。
62.参照图15所示,清理机构50包括:支架51、传动轴52、刷毛53、驱动装置ⅲ54和传动带55,支架51设于机架10上,传动轴52与支架51可转动连接,并通过传动带55与驱动装置ⅲ54连接;刷毛53设于传动轴52上。
63.本实施例中,通过设置支架51、传动轴52、刷毛53、驱动装置ⅲ54和传动带55,驱动装置ⅲ54能够通过传动带55驱动传动轴52转动,从而带动固定连接于传动轴52的刷毛53转动,以实现清理粘附于工字轮80外表面的毛刺。
64.参照图11和图12所示,单向折叠推板222包括:固定部2221和弯折部2222,固定部2221靠近弯折部2222的一端面凹入形成凹槽2223,凹槽2223的一侧设有挡板2224;弯折部2222靠近固定部2221的一端设有安装部2223,安装部2223上套设有扭簧(图中未示出)。
65.其中,安装部2223能够插入凹槽2223中,并藉由设于凹槽2223一侧的挡板2224,来限制弯折部2222单向转动。
66.参照图11所示,当弯折部2222在第二方向运动受阻时,弯折部2222向第二方向弯
折。当阻力消失后,藉由扭簧的弹性,弯折部2222恢复原状。
67.本实施例中,固定部2221和弯折部2222,固定部2221靠近弯折部2222的一端面凹入形成凹槽2223,凹槽2223的一侧设有挡板2224;弯折部2222靠近固定部2221的一端设有安装部2223,安装部2223上套设有扭簧,这样能够实现单向折叠推板222的在单向受力后发生弯折,并在力消失后,藉由扭簧恢复弹性形变,固定部2221和弯折部2222共同构成直板。
68.参照图16所示,机架上10设有护罩70,推动机构20、打磨机构30和清理机构50位于护罩70内。
69.本实施例中,通过设置护罩70,护罩70能够在未使用状态下罩住推动机构20、打磨机构30和清理机构50,以增加设备的使用寿命。
70.参照图10所示,机架10上还设有导槽11,导槽11内设有气缸固定座14,以实现驱动气缸ⅰ211和驱动气缸ⅱ221的固定。机架10上设有固定件12,用于向导轨ⅰ41和导轨ⅱ42提供安装位置。机架10的侧壁上还开有穿孔13,以供驱动装置ⅱ44的输出轴穿过。
71.本实施例提供的工字轮自动清磨装置,工作过程如下:
72.参照附图3所示,工字轮80被放置于初始位置,激光对射传感开关23的对射信号被阻断时,向控制器60发送第一信号,控制器60根据第一信号控制推动机构20向第一方向(图中箭头所示)运动,带动推板212向第一方向运动,以推动工字轮80向第一方向运动。参照图4所示,当驱动气缸ⅰ211向第一方向运动至极限值时,推动工字轮80至打磨工位。参照图5所示,工字轮80位于打磨工位,清磨轮33未与工字轮80接触。
73.参照图6所示,当感应开关24检测到工字轮80位于打磨工位时,伸缩气缸的活塞杆缩短,以驱动支架组件32顺时针转动,带动清磨轮33与工字轮80接触,进行清磨操作。当预设时间后,伸缩气缸拉长活塞杆,以驱动支架组件32逆时针转动,以带动清磨轮33远离工字轮80。
74.其中,预设时间配置为从推动机构20推动工字轮80进入打磨工位,至推动工字轮80离开打磨工位的时间。
75.当工字轮80位于打磨工位时,推板212向与第一方向相反的第二方向运动,驱动气缸ⅱ221驱动单向折叠推板222向第二方向运动,单向折叠推板222向第一方向弯折。直至驱动气缸ⅱ221刚刚离开打磨工位时,单向折叠推板222恢复直板状。
76.当驱动气缸ⅱ221的输出轴向第二方向运动至极限时,继续向第一方向运动,单向折叠推板222向第二方向运动,带动工字轮80离开打磨工位。
77.参照图7所示,直至驱动气缸ⅱ221向第一方向运动至极限位置时,单向折叠推板222推动工字轮80至清理工位。
78.虽然本实用新型披露如上,但本实用新型并非限定于此。任何本领域技术人员,在不脱离本实用新型的精神和范围内,均可作各种更动与修改,因此本实用新型的保护范围应当以权利要求所限定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1