一种真空夹紧机构及外延装置的制作方法
1.本技术涉及半导体加工设备技术领域,尤其涉及一种真空夹紧机构及外延装置。
背景技术:
2.在半导体的制造加工流程,例如cvd(化学气相沉积)制程中,是通过夹放机构将半导体基片放入真空反应器中,进行反应与加工。夹放过程通常是采用多气缸的驱动机构从不同的方向或角度进行基片的夹放,这样的结构不仅设计复杂,并且在压力及方向上难以同步,稳定性不足,此外常规的气缸由往复式金属部件组成,长期使用会因摩擦造成磨损影响制程加工的精度。
3.为此需要改进现有的夹放机构。
技术实现要素:
4.本技术为解决上述提到的技术问题,提出一种真空夹紧机构,该机构保证了运行的稳定性和安全性,伺服控制简单。
5.为了达到以上目的,本技术采用如下技术方案:
6.一种真空夹紧机构,包括:
7.基板;
8.驱动部,其连接于基板,驱动部具有伸缩的输出端;
9.第一导轨,其固定于基板;
10.滑块,其滑动连接于第一导轨,滑块连接于驱动部的输出端;
11.第二导轨,其固定于基板;
12.夹爪,其包括第一夹爪及第二夹爪,其底部分别设有导块,导块滑动连接于第二导轨;
13.连杆,其包括第一连杆及第二连杆,第一连杆的一侧连接第一夹爪,第一连杆的另一侧连接滑块,第二连杆的一侧连接第二夹爪,第二连杆的另一侧连接滑块;
14.基于驱动部推动滑块移动,滑块移动带动连杆转动,使得与第一连杆连接的第一夹爪以及与第二连杆连接的第二夹爪沿第二导轨同步滑动,以打开或闭合。通过这个的设计,夹紧机构在进行基片夹放时,两侧夹爪运动步调一致,夹取压力相同,保证了运行的稳定性和安全性,且控制简单。
15.可选的,作为一种实施方式的真空夹紧机构,驱动部为气缸,气缸输出端连接滑块,输出端上套设有波纹管。
16.可选的,作为一种实施方式的真空夹紧机构,第一夹爪及第二夹爪配置成沿输出端的轴线对称。
17.可选的,作为一种实施方式的真空夹紧机构,第一夹爪与第二夹爪平行设置。
18.可选的,作为一种实施方式的真空夹紧机构,第一连杆及第二连杆配置成沿输出端的轴线对称,且其组合呈倒喇叭形。
19.可选的,作为一种实施方式的真空夹紧机构,夹爪夹紧侧有弧形凹槽,用于夹持圆盘形的半导体基片。
20.可选的,作为一种实施方式的真空夹紧机构,第一导轨与第二导轨互相垂直,使夹爪在垂直于第一导轨的方向上平滑移动。
21.可选的,作为一种实施方式的真空夹紧机构,还包括:
22.间隙调整块,其活动连接于基板上,且介于驱动部与滑块之间,间隙调整块用以调整滑块的行程。
23.可选的,作为一种实施方式的真空夹紧机构,滑块通过销钉及限位孔与连杆活动连接,通过调整连杆端部与滑块中轴的距离。即滑块与夹爪之间的在第二导轨方向上的距离来调整夹取速度。
24.调整夹爪夹取速度的方法为:通过调整连杆的长度以及连杆端部与滑块中轴的距离,以调整气缸的推动距离以及夹爪的平移距离。当气缸推动距离大于夹爪平移距离时,气缸推动速度小于夹取速度;当气缸推动距离小于夹爪平移距离时,气缸推动速度大于夹取速度,当气缸推动距离等于夹爪平移距离时,气缸推动速度与夹取速度相同。
25.本技术还提出一种外延装置,其匹配有上述任一项实施方式的真空夹紧机构。
26.有益效果
27.与现有技术相比,本技术提出的一种真空夹紧机构,采用波纹管式单气缸与滑轨结构,结构设计简单,在进行基片夹放时,两侧夹爪运动步调一致,夹取压力相同,保证了运行的稳定性和安全性,通过单气缸驱动伺服控制简单,此外波纹管式气缸的推动方式无摩擦,可以长期稳定使用,免维护,不会影响精度,并且可以通过调整机构调整第一导轨与第二导轨之间的距离以调整夹爪的开口尺寸及夹取速度。
附图说明
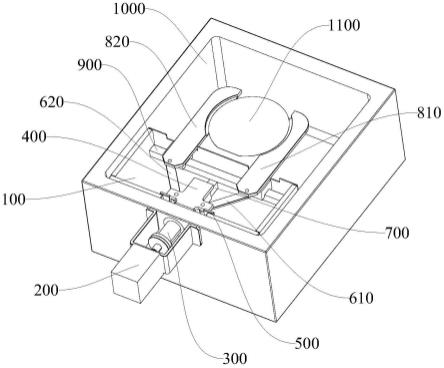
28.图1为本技术实施例装置真空夹紧机构的立体结构示意图;
29.图2为本技术实施例装置真空夹紧机构滑块结构示意图;
30.图3为本技术实施例装置真空夹紧机构夹爪结构示意图;
31.图4为本技术实施例装置真空夹紧机构俯视示意图;
32.图5为图4中a部分放大示意图;
33.图6为本技术实施例装置真空夹紧机构调整夹取速度的示意图;
34.图中:100-基板;200-气缸;300-波纹管;400-滑块;410-滑块导块;420-滑块限位孔;500-间隙调整块;600-连杆;610-第一连杆;620-第二连杆;630-开口闭合状态的连杆;640-开口打开状态的连杆;700-第一导轨;800-夹爪;810-第一夹爪;820-第二夹爪;830-夹爪导块;840-夹爪凹槽;900-第二导轨;1000-真空腔体;1100-基片;l1-气缸推动距离;l2-连杆长度;l3-连杆端部与滑块中轴的距离;l4-夹爪平移距离。
具体实施方式
35.以下结合具体实施例对上述方案做进一步说明。应理解,这些实施例是用于说明本技术而不限于限制本技术的范围。实施例中采用的实施条件可以如具体厂家的条件做进一步调整,未注明的实施条件通常为常规实验中的条件。
36.本技术提出一种真空夹紧机构及外延装置。该真空夹紧机构包括:基板;波纹管式气缸,其连接于基板;第一导轨,其固定于基板;滑块,其滑动连接于第一导轨,滑块连接于波纹管式气缸;第二导轨,其固定于基板;夹爪,其底部固定有滑块,夹爪通过底部滑块滑动连接于第二导轨;连杆,其连接于夹爪与滑块;气缸推动滑块,滑块向前运动,通过连杆带动滑动导轨上的夹爪运动,气缸向前推动的时候夹爪打开,气缸向后收回的时候夹爪闭合。该夹紧机构结构简单,在进行基片夹放时,两侧夹爪同步移动、步调一致,夹取压力相同,保证了运行的稳定性和安全性。
37.接下来请参考图1至图6来详细描述本技术实施例装置的真空夹紧机构。
38.一种真空夹紧机构,包括:
39.基板100;
40.驱动部,其连接于基板100,驱动部具有伸缩的输出端;
41.第一导轨700,其固定于基板100;
42.滑块400,其滑动连接于第一导轨700,滑块400连接于驱动部的输出端;
43.第二导轨900,其固定于基板100;
44.夹爪800,其包括第一夹爪810及第二夹爪820,其底部分别设有导块830,导块830滑动连接于第二导轨900;
45.连杆600,其包括第一连杆610及第二连杆620,第一连杆610的一侧连接第一夹爪810,第一连杆610的另一侧连接滑块400,第二连杆620的一侧连接第二夹爪820,第二连杆620的另一侧连接滑块400;
46.基于驱动部推动滑块400移动,滑块400移动带动连杆600转动,使得与第一连杆610连接的第一夹爪810以及与第二连杆620连接的第二夹爪820沿第二导轨900同步滑动,以打开或闭合。
47.可选的,作为一种实施方式的真空夹紧机构,驱动部为气缸200,气缸200输出端连接滑块400,输出端上套设有波纹管300。
48.可选的,作为一种实施方式的真空夹紧机构,第一夹爪810及第二夹爪820配置成沿输出端的轴线对称。
49.可选的,作为一种实施方式的真空夹紧机构,第一夹爪810与第二夹爪820平行设置。
50.可选的,作为一种实施方式的真空夹紧机构,第一连杆610及第二连杆620配置成沿输出端的轴线对称,且其组合呈倒喇叭形。
51.可选的,作为一种实施方式的真空夹紧机构,夹爪800夹紧侧有弧形凹槽840,用于夹持圆盘形的半导体基片1100。
52.可选的,作为一种实施方式的真空夹紧机构,第一导轨700与第二导轨900互相垂直,使夹爪800在垂直于第一导轨700的方向上平滑移动。
53.可选的,作为一种实施方式的真空夹紧机构,还包括:
54.间隙调整块500,其活动连接于基板100上,且介于驱动部与滑块400之间,间隙调整块500用以调整滑块400的行程。
55.可选的,作为一种实施方式的真空夹紧机构,滑块400通过销钉及限位槽420与连杆600活动连接,通过调整连杆600端部与滑块400中轴的距离,即滑块400与夹爪800之间的
在第二导轨900方向上的距离来调整夹取速度。
56.具体调整夹取速度的方法参考图5所示,图5为本技术实施例装置真空夹紧机构调整夹取速度的示意图,其中附图标记630为开口闭合状态的连杆,附图标记640为开口打开状态的连杆,l1为气缸的推动距离,l2为连杆的长度,l3为连杆端部与滑块中轴的距离,l4为夹爪的平移距离。
57.通过调整连杆长度以及连杆端部与滑块中轴的距离,即l2与l3,以调整气缸推动距离以及夹爪平移距离,即l1与l4的数值。当l1大于l4时,气缸推动速度小于夹取速度;当l1小于l4时,气缸推动速度大于夹取速度,当l1等于l4时,气缸推动速度与夹取速度相同。
58.上述实施例只为说明本技术的技术构思及特点,其目的在于让熟悉此项技术的人是能够了解本技术的内容并据以实施,并不能以此限制本技术的保护范围。凡如本技术精神实质所做的等效变换或修饰,都应涵盖在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1