一种无缝钢管倒角机的制作方法
1.本技术涉及钢管倒角技术领域,尤其是涉及一种无缝钢管倒角机。
背景技术:
2.钢管加工过程中通常需要对钢管进行切割处理,以得到适当尺寸的钢管。由于钢管的切割面存在不平整或者切斜等问题,并且钢管的切割面易存在有大量的毛刺,因此在钢管加工过程中需要通过倒角机对钢管的切割端进行倒角处理。
3.公告号为cn213196852u的中国专利公开了一种钢管倒角机,包括底板和设置于底板上的支撑杆,支撑杆上设置有气缸,气缸的输出端连接有电机,电机的输出端连接有倒角砂轮;底板上设置有传送组件,以用于将钢管传输至倒角砂轮处,从而便于倒角砂轮对钢管进行倒角处理。
4.针对上述中的相关技术,发明人发现该技术中至少存在如下问题:钢管通过设备移动至倒角砂轮处时,不便于精准控制每一根钢管和倒角砂轮之间的相对位置,易导致倒角砂轮对钢管的倒角处理存在误差,从而影响钢管的倒角精度和加工质量,故有待改善。
技术实现要素:
5.为了改善不便控制钢管和倒角砂轮的相对位置易影响钢管的倒角精度和加工质量的问题,本技术提供了一种无缝钢管倒角机。
6.本技术提供的一种无缝钢管倒角机采用如下的技术方案:
7.一种无缝钢管倒角机,包括固定台和设置于固定台上的砂轮机;所述固定台一侧设置有固定架,所述固定架上转动设置有若干用于支撑钢管本体的转动辊,每一所述转动辊的周壁上均开设有用于限制钢管本体移动方向的导向环槽;所述固定架远离固定台的一侧设置有用于驱动钢管本体靠近或者远离砂轮机的伸缩件,所述伸缩件的输出端设置有用于夹持钢管本体的夹持组件;所述固定台上设置有用于限制钢管本体和砂轮机之间间距的定位组件;所述固定台上表面设置有基准块,所述基准块上设置有用于固定钢管本体的压料组件。
8.通过采用上述技术方案,夹持组件对钢管本体进行夹持,以将钢管本体固定于伸缩件的输出端;然后通过伸缩件的输出端伸出,带动钢管本体靠近或者远离砂轮机,以便于砂轮机对钢管本体进行倒角;转动辊减少了钢管本体在固定架上的移动阻力,同时导向环槽限制了钢管本体在固定架上的移动路径,并限制了钢管本体在砂轮机宽度方向和高度方向的位置;通过定位组件对钢管本体和砂轮机之间的间距进行限定,限制了钢管本体与砂轮机沿着固定架的长度方向相对位置,从而限制了钢管本体在砂轮机六个自由度上的位置;最后通过压料组件对钢管本体进行固定,减少了钢管本体在倒角过程中出现歪斜的现象,更进一步的提高了砂轮机对钢管本体的倒角精度和加工质量。
9.优选的,所述夹持组件包括中心杆、固定杆、夹持杆、弹性件和触发杆;所述中心杆设置于伸缩件的输出端,所述固定杆设置于中心杆的两端;所述夹持杆转动设置于每一固
定杆远离中心杆的一端,且两所述夹持杆分别位于钢管本体的两侧,两所述夹持杆相互靠近一端均设置有便于夹持钢管本体的导向面;所述弹性件设置于每一夹持杆与中心杆之间,所述弹性件用于驱使夹持杆转动以夹持钢管本体;所述触发杆设置于固定架上,且所述触发杆位于夹持杆和伸缩件之间,所述触发杆用于抵触夹持杆远离钢管本体的一端,以使得夹持杆转动并脱离对钢管本体的夹持。
10.通过采用上述技术方案,控制伸缩件的输出端带动夹持杆沿着固定架的长度方向进行移动;当夹持杆与触发杆相抵并驱使夹持杆转动时,通过增加了两组夹持杆之间的间距,以使得夹持杆脱离对钢管本体的夹持,同时在次过程中,缓冲件根据夹持杆的转动发生形变并积聚弹性势能;通过夹持杆脱离与触发杆的抵触,缓冲件通过自身的弹力驱使夹持杆反向转动并逐渐恢复成原样,通过减小了两组夹持杆之间的间距,以使得夹持杆实现对钢管本体的夹持固定;导向面便于夹持杆相对钢管本体发生转动,从而便于夹持杆对钢管本体进行夹持或者脱离。
11.优选的,所述伸缩件的输出端设置有连接杆,所述连接杆靠近中心杆的一端滑动设置有与中心杆相连的滑动杆,所述滑动杆外部套设有缓冲件,所述缓冲件的一端与滑动杆相连,所述缓冲件的另一端与连接杆相连。
12.通过采用上述技术方案,当伸缩件的输出端带动钢管本体与定位组件相抵以进行定位时,缓冲件减少了钢管本体与定位组件的刚性碰撞,保障了定位组件和伸缩件的使用寿命。
13.优选的,所述定位组件包括定位气缸、滑动块和定位块;所述定位气缸设置于固定台内部,所述滑动块设置于定位气缸的输出端,所述滑动块贯穿固定台的顶部;所述定位块设置于滑动块靠近砂轮机的侧壁,所述定位块与钢管本体靠近砂轮机的端壁相抵。
14.通过采用上述技术方案,控制定位气缸的输出端伸出,带动滑动块和定位块向上移动,定位块逐渐移动至钢管本体和砂轮机之间;伸缩件驱动钢管本体逐渐靠近砂轮机,当钢管本体与定位块相抵后,以快速定位钢管本体和砂轮机的相对位置,限制了钢管本体与砂轮机之间的距离;当压料组件固定完钢管本体后,控制定位气缸的输出端收缩,带动定位块逐渐脱离对钢管本体的抵触,以便于砂轮机对钢管本体进行倒角处理,从而提高了钢管本体的倒角精度和加工质量。
15.优选的,所述基准块靠近滑动块的侧壁相对滑动块设置有两组固定块,所述滑动块的宽度方向两侧均设置有贯穿固定台顶部的限位块,两所述固定块靠近滑动块的侧壁均开设有供限位块滑动抵入的滑动缺口。
16.通过采用上述技术方案,限位块与滑动缺口的内侧壁相抵,限制了滑动块和定位块的移动路径;同时,当钢管本体与定位块相抵时,减少了定位块和滑动块出现歪斜的现象,从而提高了定位组件的使用稳定性,提高了定位组件对钢管本体定位的精准性,从而提高了钢管本体的倒角精度和加工质量。
17.优选的,所述压料组件包括压料气缸、压料块和承压块;所述压料气缸设置于基准块的顶部,所述基准块靠近砂轮机的侧壁贯穿设置有供钢管本体穿过的安装口,所述压料块和承压块均设置于安装口内部,所述压料块与压料气缸的输出端相连,所述承压块靠近压料块的侧壁开设有便于固定钢管本体的承压缺口。
18.通过采用上述技术方案,当钢管本体相对砂轮机的位置定位完毕后。控制压料气
缸的输出端伸出,使得压料块将钢管本体抵压于承压缺口内部,实现了钢管本地的固定,以便于砂轮机对钢管本体进行倒角处理,提高了钢管本体倒角处理过程中的稳定性,从而提高了钢管本体的倒角精度和加工质量;承压缺口便于对钢管本体进行定位,同时承压缺口增加了承压块和钢管本体的接触面积,提高了压料组件对钢管本体固定的稳定性。
19.优选的,所述固定架的一侧设置有上料架,所述上料架的顶部设置有便于钢管本体朝向固定架滚动的倾斜杆;所述倾斜杆上设置有与每一钢管本体相抵的倾斜板,所述上料架内部沿上料架长度方向间隔设置有若干挡料气缸,每一所述挡料气缸的输出端均设置有贯穿倾斜板的挡料杆,所述挡料杆与钢管本体相抵,以限制钢管本体脱离上料架;所述上料架内部沿上料架长度方向间隔设置有若干顶撑气缸,每一所述顶撑气缸的输出端均设置有贯穿倾斜板的顶撑板,所述顶撑板和挡料杆之间留存有放置单个钢管本体的限料间隙。
20.通过采用上述技术方案,钢管本体上料时,控制顶撑气缸的输出端伸出,顶撑板贯穿倾斜板并顶撑堆积于倾斜板上的钢管本体,使得顶撑板和挡料杆之间仅留存单个钢管本体,然后控制挡料气缸的输出端收缩,带动挡料杆向下移动,使得挡料杆脱离与钢管本体的抵触,从而便于单个钢管本体沿着倾斜杆的倾斜方向滚落至转动辊的导向环槽内部,实现了钢管本体的快速上料。
21.优选的,所述固定架远离上料架的一侧设置有下料架,所述固定架内部沿固定架长度方向间隔设置有若干下料气缸,每一所述下料气缸的输出端均设置有用于顶撑钢管本体的下料板,所述下料板的顶部设置有便于钢管本体朝向下料架滚动的导向板。
22.通过采用上述技术方案,钢管本体倒角完毕后,控制下料气缸的输出端伸出,下料板顶撑钢管本体向上移动,使得钢管本体逐渐脱离转动棍;同时,下料板上的钢管本体通过导向板的倾斜方向的引导,从而驱使倒角完毕的钢管本体滚落下料架上进行收集,实现了钢管本体的快速下料。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.通过设置伸缩件和夹持组件以带动钢管本体靠近或者远离砂轮机,通过设置转动辊和导向环槽,限制了钢管本体在砂轮机宽度方向和高度方向的位置;通过设置定位组件,限制了钢管本体与砂轮机沿着固定架的长度方向的相对位置,从而限制了钢管本体相对于砂轮机多个自由度方向的位置,并且通过压料组件对钢管本体进行固定,实现了快速的精准控制钢管本体和砂轮机的相对位置,从而提高了钢管本体的倒角精度和加工质量。
25.2.通过设置上料架、顶撑气缸、顶撑板、挡料气缸和挡料杆,以实现钢管本体的快速上料;通过设置下料气缸、下料板和导向板,以便于驱使加工完毕的钢管本体快速脱离固定架,并移动至下料架上进行快速收集。
附图说明
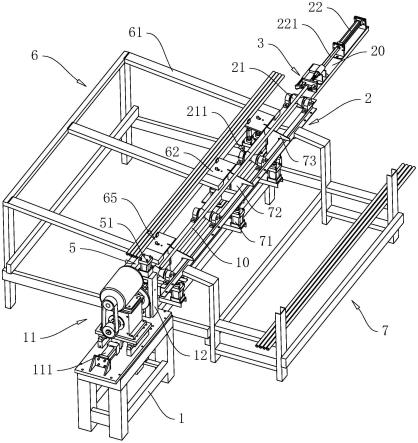
26.图1是本技术实施例的一种无缝钢管倒角机的结构示意图;
27.图2是用于体现压料组件和定位组件的位置关系的结构示意图;
28.图3是用于体现伸缩件和夹持组件的连接关系的结构示意图;
29.图4是用于体现图2中a部分的放大示意图;
30.图5是用于体现固定架、上料架和下料架的连接关系的结构示意图。
31.附图标记说明:
32.1、固定台;10、钢管本体;11、砂轮机;111、调节气缸;12、基准块;121、固定块;122、滑动缺口;123、安装口;2、固定架;20、安装板;201、导向筒;21、转动辊;211、导向环槽;22、伸缩件;221、连接杆;222、滑动杆;223、缓冲件;3、夹持组件;31、中心杆;32、固定杆;33、夹持杆;331、导向面;34、弹性件;35、触发杆;351、螺杆;352、固定筒;4、定位组件;41、定位气缸;42、滑动块;421、限位块;43、定位块;431、抵接缺口;5、压料组件;51、压料气缸;52、压料块;53、承压块;531、承压缺口;6、上料架;61、倾斜杆;62、倾斜板;63、挡料气缸;631、挡料杆;64、顶撑气缸;641、顶撑板;65、限料间隙;7、下料架;71、下料气缸;72、下料板;73、导向板。
具体实施方式
33.以下结合附图1-5对本技术作进一步详细说明。
34.本技术实施例公开一种无缝钢管倒角机。
35.参照图1,一种无缝钢管倒角机包括通过地脚螺栓固定于地面上的固定台1和滑动连接于固定台1上表面的砂轮机11。固定台1上表面焊接固定有调节气缸111,调节气缸111的输出端与砂轮机11焊接固定。通过控制调节气缸111的输出端伸缩,以便于控制砂轮机11对钢管本体10进行倒角处理。
36.参照图1,固定台1一侧的地面上焊接固定有固定架2,固定架2的顶部转动连接有若干转动辊21,所有的转动辊21均沿着固定架2的长度方向间隔分布,以用于支撑钢管本体10。每一转动辊21的周壁上均开设有供钢管本体10抵入的导向环槽211,从而限制了钢管本体10在固定架2上的移动方向,并且限制了钢管本体10与砂轮机11的输出端的相对高度。在本实施例中,位于导向环槽211内部的钢管本体10与砂轮机11的输出端同轴,以便于砂轮机11对钢管本体10进行精准倒角处理。
37.参照图1和图2,固定架2远离固定台1的一侧焊接有安装板20,安装板20上沿长度方向焊接固定有伸缩件22,在本实施例中,伸缩件22为伸缩气缸。伸缩件22的输出端设置有用于夹持钢管本体10的夹持组件3,以便于通过控制伸缩件22的输出端伸缩,从而驱使钢管本体10靠近或者远离砂轮机11。固定台1上设置有用于定位钢管本体10的定位组件4,固定台1上表面焊接固定有基准块12,基准块12上设置有用于固定钢管本体10的压料组件5,以便于快速控制每一根钢管本体10与砂轮机11之间的相对位置,从而提高了钢管本体10的倒角精度和加工质量。
38.参照图1和图3,夹持组件3包括中心杆31、固定杆32、夹持杆33、弹性件34和触发杆35。中心杆31连接于伸缩件22的输出端,且伸缩件22的输出端与中心杆31的连接处位于中心杆31的中部位置。固定杆32对称分布于中心杆31的两端,且固定杆32的端壁与中心杆31朝向钢管本体10的侧壁焊接固定。
39.参照图1和图3,夹持杆33转动连接于每一固定杆32远离中心杆31的一端,两组夹持杆33对称分布于钢管本体10的两侧,且两组夹持杆33相互靠近的一端均开设有导向面331,以便于两组夹持杆33对钢管本体10进行夹持。
40.参照图1和图3,弹性件34连接于每一夹持杆33与中心杆31之间,且两组弹性件34对称分布于钢管本体10的两侧。在本实施例中,弹性件34为弹簧;弹性件34长度方向一端与位于钢管本体10同侧的夹持杆33远离钢管本体10的端部焊接固定,弹性件34的另一端与位
于钢管本体10同侧的中心杆31端部焊接固定。初始状态下,弹性件34未发生弹性形变,两组夹持杆33相互平行,以使得两组夹持杆33对钢管本体10进行夹持。
41.参照图1和图3,触发杆35位于夹持杆33和伸缩件22之间,触发杆35包括螺杆351和固定筒352。固定筒352通过铁板连接于安装板20上,且固定筒352和伸缩件22的输出端相互平行。螺杆351螺纹连接于固定筒352靠近夹持杆33的一端,螺杆351远离固定筒352的一端可与夹持杆33远离钢管本体10的一端相抵触。
42.参照图1和图3,当伸缩件22的输出端收缩时,带动夹持杆33朝向靠近螺杆351的方向进行移动。夹持杆33远离钢管本体10的一端与螺杆351相抵,使得夹持杆33发生转动,弹性件34受到拉力发生拉伸形变,从而扩大了两组夹持杆33之间的间隙,以便于将钢管本体10放置于两组夹持杆33之间。
43.参照图1和图3,当伸缩件22的输出端伸出时,夹持杆33逐渐脱离与螺杆351的抵触,弹性件34受到的拉力逐渐减小以使得弹性件34发生收缩形变。弹性件34发生收缩形变的过程中驱使夹持杆33转动,使得两组夹持杆33逐渐趋于相互平行的状态,从而缩小了两组夹持杆33之间的间距,以便于两组夹持杆33对钢管本体10进行夹持。
44.参照图1和图3,通过转动螺杆351可调节触发杆35整体的长度尺寸,以调整夹持杆33与螺杆351相抵触时,夹持杆33的转动角度,以便于两组夹持杆33夹持不同直径尺寸的钢管本体10,从而增加了整体装置的实用性。
45.参照图1和图2,定位组件4包括定位气缸41、滑动块42和定位块43;定位气缸41焊接固定于固定台1内部,定位气缸41沿竖直方向进行摆放。滑动块42焊接固定于定位气缸41的输出端,且滑动块42贯穿固定台1的顶部。定位块43焊接滑动块42靠近砂轮机11的侧壁,定位块43的顶端高于滑动块42的顶端,且定位块43远离砂轮机11的侧壁开设有用于抵接钢管本体10的抵接缺口431。当伸缩件22的输出端推动钢管本体10朝向砂轮机11进行移动时,钢管本体10的端部与抵接缺口431的内侧壁相抵,以便于快速定位钢管本体10和砂轮机11之间的距离。
46.参照图2和图4,基准块12位于滑动块42远离砂轮机11的一侧,且滑动块42和基准块12相互靠近的侧壁相互贴合。基准块12靠近滑动块42的侧壁焊接固定有两组固定块121,两组固定块121对称分布于滑动块42的宽度方向两侧,固定块121和滑动块42相互靠近的侧壁相抵。滑动块42的宽度方向两侧均一体成型有限位块421,且限位块421贯穿固定台1的顶部。两组固定块121相互靠近的侧壁均开设有供限位块421滑动抵入的滑动缺口122,通过限位块421与滑动缺口122的内侧壁相抵,从而减少了滑动块42和定位块43出现歪斜的现象。
47.参照图1和图3,伸缩件22的输出端焊接固定有连接杆221,安装板20靠近伸缩件22的侧壁通过支板焊接固定有导向筒201,固定筒352与导向筒201焊接固定。连接杆221穿插于导向筒201内部,导向筒201对连接杆221起到支撑和导向的作用。
48.参照图2和图3,连接杆221靠近中心杆31的一端滑动连接有滑动杆222,滑动杆222远离连接杆221的一端与中心杆31的中部位置焊接固定。滑动杆222的外部套接有缓冲件223,在本实施例中,缓冲件223为弹簧。缓冲件223的一端与滑动杆222焊接固定,缓冲件223的另一端与连接杆221焊接固定。当伸缩件22驱动钢管本体10抵触定位块43时,缓冲件223受到压力进行弹性收缩,从而减少了钢管本体10和定位块43的刚性碰撞。
49.参照图1和图2,压料组件5包括压料气缸51、压料块52和承压块53。压料气缸51焊
接固定于基准块12的顶部,基准块12靠近砂轮机11的侧壁贯穿有安装口123,压料气缸51的输出端贯穿基准块12的顶部并抵入安装口123内部。压料块52焊接固定于压料气缸51的输出端,且压料块52位于安装口123的内部,以便于压料气缸51的输出端带动压料块52沿着基准块12的高度方向在安装口123内部进行移动。
50.参照图1和图2,承压块53通过螺栓固定于安装口123的内部,且承压块53位于压料块52的下方。承压块53靠近压料块52的侧壁开设有承压缺口531。当压料气缸51的输出端带动压料块52将钢管本体10压紧于承压缺口531内部时,钢管本体10靠近砂轮机11的一端与砂轮机11的输出端同轴,以便于砂轮机11对钢管本体10进行精准的倒角处理。
51.参照图1和图5,固定架2一侧的地面上放置有上料架6,上料架6的顶部焊接有若干倾斜杆61,所有的倾斜杆61均沿着上料架6的长度方向间隔分布。每一倾斜杆61靠近固定架2的一端均低于倾斜杆61远离固定架2的一端,以便于驱使固定架2上的钢管本体10朝向固定架2进行滚动。
52.参照图1和图5,上料架6内部焊接有若干挡料气缸63,所有的挡料气缸63均沿着上料架6的长度方向间隔分布。每一倾斜杆61靠近固定架2的一端均焊接固定有倾斜板62,每一挡料气缸63的输出端均焊接固定有贯穿倾斜板62的挡料杆631。当挡料气缸63的输出端带动挡料杆631伸出并贯穿倾斜板62时,挡料杆631与钢管本体10相抵,从而限制了上料架6上的钢管本体10脱离上料架6。
53.参照图1和图5,上料架6内部沿着上料架6的长度方向间隔焊接有若干顶撑气缸64,所有的顶撑气缸64均位于挡料气缸63远离固定架2的一侧。在本实施例中,倾斜板62、挡料气缸63和顶撑气缸64分别一一对应。每一顶撑气缸64的输出端均焊接固定有贯穿倾斜板62的顶撑板641,且每一顶撑板641和相邻的挡料杆631之间均留存有仅供放置单个钢管本体10的限料间隙65。
54.参照图1和图5,当顶撑气缸64的输出端带动顶撑板641伸出并穿过倾斜板62上,顶撑板641对倾斜板62上堆积的钢管本体10进行顶撑,使得挡料杆631和顶撑板641之间仅留存单个钢管本体10,以便于进行钢管本体10的上料。
55.参照图1和图5,固定架2远离上料架6一侧的地面上放置有下料架7,以用于收集倒角处理完毕的钢管本体10。固定架2内部沿着固定架2的长度方向间隔焊接固定有若干下料气缸71,每一下料气缸71的输出端均焊接固定有下料板72。每一下料板72的顶部均一体成型有导向板73,且导向板73靠近下料架7的一端低于导向板73远离下料架7的一端。当下料气缸71的输出端伸出,带动下料板72顶撑钢管本体10后,钢管本体10逐渐脱离转动辊21,然后钢管本体10沿着导向板73的倾斜方向朝向下料架7进行滚动。
56.本技术实施例一种无缝钢管倒角机的实施原理为:
57.钢管本体10进行倒角处理时,先控制顶撑气缸64的输出端伸出,使得顶撑板641贯穿倾斜板62并顶撑倾斜板62上堆积的钢管本体10,使得顶撑板641和挡料杆631之间仅留存有单个的钢管本体10;然后控制挡料气缸63的输出端收缩,使得挡料杆631脱离对钢管本体10的抵触,以便于钢管本体10沿着倾斜杆61的倾斜方向滚动至转动辊21上的导向环槽211内部,实现了钢管本体10的自动上料。
58.控制伸缩件22的输出端伸出,使得夹持杆33朝向靠近砂轮机11的方向进行移动;夹持杆33逐渐脱离与触发杆35的抵触,弹性件34通过自身弹力发生收缩形变,以驱动夹持
杆33进行转动,使得两组夹持杆33趋于相互平行,以缩小两组夹持杆33之间的间距,从而实现夹持杆33对钢管本体10的夹持。
59.伸缩件22的输出端驱动钢管本体10朝向靠近砂轮机11的方向进行移动,钢管本体10靠近砂轮机11的一端逐渐穿过基准块12的安装口123并且逐渐靠近定位块43。然后,通过钢管本体10与定位块43的抵接缺口431相抵,以快速定位钢管本体10和砂轮机11之间的距离。
60.然后,控制压料气缸51的输出端伸出,使得压料块52朝向靠近承压块53的方向进行移动,承压块53将钢管本体10抵紧于承压块53的承压缺口531内部,以实现对钢管本体10的固定,从而实现了快速定位钢管本体10和砂轮机11的相对位置,以便于提高钢管本体10的倒角精度和加工质量。
61.然后,定位气缸41的输出端收缩,使得定位块43逐渐脱离与钢管本体10的抵触,以便于通过调节气缸111控制砂轮机11对钢管本体10进行倒角处理。
62.砂轮机11对钢管本体10倒角处理完毕后,控制压料气缸51的输出端收缩,使得压料块52逐渐脱离对钢管本体10的抵压;然后,控制伸缩件22的输出端收缩,使得夹持杆33带动钢管本体10朝向靠近触发杆35的方向进行移动,并使得钢管本体10逐渐脱离基准块12。
63.夹持杆33远离钢管本体10的一端逐渐与触发杆35相抵,使得夹持杆33发生转动,增加了两组夹持杆33之间的间距,从而使得夹持杆33对钢管本体10的夹持。此时,控制下料气缸71的输出端伸出,使得下料板72和导向板73顶撑钢管本体10,以驱使钢管本体10逐渐脱离转动辊21的导向环槽211,并沿着导向板73的倾斜方向滚动至下料架7上进行收集,从而实现了钢管本体10自动化的上料、下料和精准倒角处理。
64.以上均为本技术的较佳实施例,并非依次限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1