一种带分体式前叉的墙面打磨机的制作方法
1.本实用新型涉及墙面打磨机技术领域,尤其是涉及一种带分体式前叉的墙面打磨机。
背景技术:
2.墙面打磨机,即一种代替传统人工手拿砂纸打磨墙面、物件的工具。
3.现有技术中,墙面打磨机的用于连接工作头与手柄的前叉均为一体塑制成型结构,这在制作时需要用到较大的注塑模具,不仅不方便,而且制作成本较高,同时,由于前叉采用单一的塑料材质结构,所以强度低,装饰性差,再者,当前叉在使用过程中出现损坏时,需要整体置换,这也会增加产品零部件的维护成本。
技术实现要素:
4.本实用新型的目的在于提供一种带分体式前叉的墙面打磨机,以方便前叉的制作,并降低其制作成本及维护成本,提高其强度和装饰性。
5.本实用新型的目的通过以下技术方案予以实现:
6.一种带分体式前叉的墙面打磨机,包括手柄、工作头以及将工作头与手柄前端相连的前叉,所述前叉包括左右对称设置的左叉臂和右叉臂;所述左叉臂和右叉臂均包括分体设置的前段、中间段及后段;所述左叉臂和右叉臂的前段呈左右间隔设置,且所述左叉臂和右叉臂的前段的一端分别与工作头的左右两侧活动连接,另一端分别与所述左叉臂和右叉臂的中间段一端固定插接;所述左叉臂和右叉臂的中间段呈左右间隔设置,且所述左叉臂和右叉臂的中间段的与前段连接相反的一端分别与所述左叉臂和右叉臂的后段一端固定插接;所述左叉臂和右叉臂的后段相向对接且外套于所述手柄的前端外侧面上与之固定在一起。
7.进一步的,所述左叉臂和右叉臂的后段均为半壳体结构,二者通过螺丝固定在一起,并且,其中一个叉壁的后段内侧面上设有定位插柱,所述手柄的前端侧壁上设有供该定位插柱插入的定位插孔。
8.进一步的,所述手柄为中空管体结构,所述左叉臂和右叉臂的后段之间形成用于套设所述手柄前端的中空腔体,该中空腔体的前端形成有开口部;所述墙面打磨机还包括吸尘软管,所述工作头包括有吸尘机构,所述吸尘软管一端与所述吸尘机构相连,所述吸尘软管另一端自所述开口部伸入所述中空腔体内并与所述手柄的前端通过连接件相连。
9.进一步的,所述左叉臂和右叉臂的中间段均为中空管体结构,所述左叉臂和右叉臂的前段后端均设有第一插接柱,所述左叉臂和右叉臂的后段前端均设有第二插接柱,所述第一插接柱分别插入所述左叉臂和右叉臂的中间段前端并与之通过螺丝固定连接,所述第二插接柱分别插入所述左叉臂和右叉臂的中间段后端并与之通过螺丝固定连接。
10.进一步的,所述左叉臂和右叉臂的前段及后段均为塑料构件,所述左叉臂和右叉臂的中间段为金属管状构件。
11.进一步的,所述左叉臂和右叉臂的中间段为铝型材管状构件。
12.进一步的,所述左叉臂和右叉臂的中间段均为斜直管结构,二者呈后窄前宽的外八字间隔设置。
13.进一步的,所述左叉臂和右叉臂的前段均为相对于中间段的前端向内收缩一定角度的杆体结构。
14.进一步的,所述工作头还包括护罩、设置在护罩内的磨盘、设置在护罩上端外部用于驱动磨盘的电机以及可左右摆动地枢接于护罩上端外部的摆动架,所述左叉臂和右叉臂的前段前端分别可前后转动地枢接于所述摆动架的左右两侧。
15.与现有技术相比,本实用新型具有如下有益效果:
16.首先,本实用新型中,组成前叉的左叉臂和右叉臂均由分体设置的前段、中间段及后段组成,因此在制作时,可以选用常规小型注塑模具制作即可,既方便,又能减少制作成本,而且,当前叉在使用过程中出现损坏时,也只需要将其中损坏的部分拆卸更换即可,而无需整体置换,从而还能够降低维护成本。
17.其次,本实用新型中,左叉臂和右叉臂的前段及后段均为塑料构件,中间段为金属管状构件(例如铝型材管状构件),这样不仅可以提高前叉的装饰性,而且也能在前叉的最薄弱处起到加强作用,从而提高前叉的整体强度,使之不容易出现折断现象。
附图说明
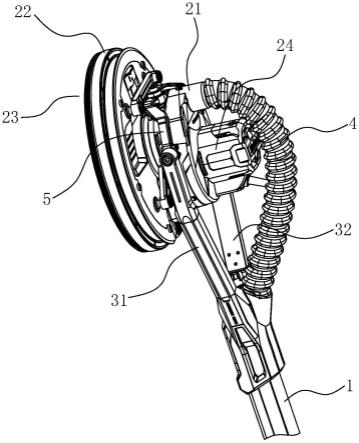
18.图1是本实用新型一种带分体式前叉的墙面打磨机的立体示意图。
19.图2是本实用新型一种带分体式前叉的墙面打磨机的头部放大示意图。
20.图3是本实用新型中前叉的结构示意图。
21.图4是本实用新型中前叉的分解示意图。
具体实施方式
22.下面结合附图给出的实施例对本实用新型作进一步详细说明。
23.如图1至图4所示,本实施例所述一种带分体式前叉的墙面打磨机,包括手柄1、工作头2以及将工作头2与手柄1前端相连的前叉3,前叉3包括左右对称设置的左叉臂31和右叉臂32;左叉臂31包括分体设置的前段311、中间段312及后段313,右叉臂32包括分体设置的前段321、中间段322及后段323;左叉臂31和右叉臂32的前段311、321呈左右间隔设置,且左叉臂31和右叉臂32的前段311、321的一端分别与工作头2的左右两侧活动连接,另一端分别与左叉臂31和右叉臂32的中间段312、322一端固定插接;左叉臂31和右叉臂32的中间段312、322呈左右间隔设置,且左叉臂31和右叉臂32的中间段312、322的与前段311、321连接相反的一端分别与左叉臂31和右叉臂32的后段313、323一端固定插接;左叉臂31和右叉臂32的后段313、323相向对接且外套于手柄1的前端外侧面上与之固定在一起。
24.本实施例中,左叉臂31和右叉臂32的后段313、323均为半壳体结构,二者通过螺丝固定在一起,并且,其中左叉壁31的后段313内侧面上设有定位插柱3130,手柄1的前端侧壁上设有供该定位插柱3130插入的定位插孔101,从而使得前叉3不会相对于手柄1发生轴向移动和周向转动。
25.本实施例中,手柄1为中空管体结构,左叉臂31和右叉臂32的后段313、323之间形
成用于套设手柄1前端的中空腔体300,该中空腔体300的前端形成有开口部3001;墙面打磨机还包括吸尘软管4,工作头2包括有吸尘机构21,吸尘软管4一端与吸尘机构21相连,吸尘软管4另一端自开口部3001伸入中空腔体300内并与手柄1的前端通过连接件相连。工作头2在打磨墙面时产生的灰尘依次经吸尘机构21、吸尘软管4进入手柄1内,并自手柄1尾部的出尘口进入外部集尘装置。
26.本实施例中,左叉臂31和右叉臂32的中间段312、322均为中空管体结构,左叉臂31和右叉臂32的前段311、321后端均设有第一插接柱3111、3211,左叉臂31和右叉臂32的后段313、323前端均设有第二插接柱3131、3231,所述第一插接柱3111、3211分别插入左叉臂31和右叉臂32的中间段312、322前端并与之通过螺丝固定连接,所述第二插接柱3131、3231分别插入左叉臂31和右叉臂32的中间段312、322后端并与之通过螺丝固定连接。当左叉臂31和/或右叉臂32的某段出现损坏需要维护时,只需拆开相应的螺丝,并将该损坏段拆出更换即可。
27.本实施例中,左叉臂31和右叉臂32的前段311、321及后段313、323均为塑料构件,左叉臂31和右叉臂32的中间段312、322为金属管状构件,这样不仅可以提高前叉的装饰性,而且也能在前叉的最薄弱处起到加强作用,从而提高前叉的整体强度,使之不容易出现折断现象。
28.优选的,左叉臂31和右叉臂32的中间段312、322为铝型材管状构件,这样在确保前叉强度的基础上,还能减少前叉重量,使之质轻、轻便。
29.本实施例中,左叉臂31和右叉臂32的中间段312、322均为斜直管结构,二者呈后窄前宽的外八字间隔设置。并且,左叉臂31和右叉臂32的前段311、321均为相对于中间段312、322的前端向内收缩一定角度的杆体结构。
30.本实施例中,工作头2还包括护罩22、设置在护罩22内的磨盘23、设置在护罩22上端外部用于驱动磨盘23的电机24以及可左右摆动地枢接于护罩22上端外部的摆动架5,左叉臂31和右叉臂32的前段前端分别可前后转动地枢接于摆动架5的左右两侧。
31.以上所述者,仅为本实用新型的较佳实施例而已,当不能以此限定本实用新型实施的范围,即大凡依本实用新型申请专利范围及实用新型说明内容所作的简单的等效变化与修饰,皆仍属本实用新型专利涵盖的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1