一种超声波打磨系统及其控制方法与流程
本发明涉及超声波,具体涉及一种超声波打磨系统及其控制方法。
背景技术:
1、在超声波打磨应用中,由于需要携带的打磨头和锁头的款式非常多,需求的频率和震动幅度各不相同,甚至在同一个打磨头在损耗程度不同时也会造成需要不同的频率驱动,且频率相差较大。如2mm厚的纤维油石在完整状态时为27khz,在只有一半长度时可以升高到29khz。而金属条打磨头则可能只有21khz,使用传统的换能器根据电压电流相位去判断锁相,由于可能存在多个谐振工作区的情况并不能很好的工作。
2、传统技术使用单芯片锁相环的方式,在大范围的锁相中(如要求10k带宽的场合),由于是由模拟电路组成,受温度的影响较大,且能稳定工作的范围有限,存在无法实现宽频率跟踪范围的缺陷,常常还需要增加一个调谐旋钮用于可跟踪频率工作区域的调整;
3、并且传统电路的保护值不能随意调整,而是固化于电路中的一个值,只能起到保护发生器和换能器的作用,在使用较为脆弱的打磨头时并不能通过设置合适的参数保护打磨头。
技术实现思路
1、为了至少部分地解决上述问题,本发明提供了一种超声波打磨系统及其控制方法,以解决现有技术中,所存在的受温度等环境变化造成的影响,需要调谐旋钮,可使用频段的范围有限的缺陷。
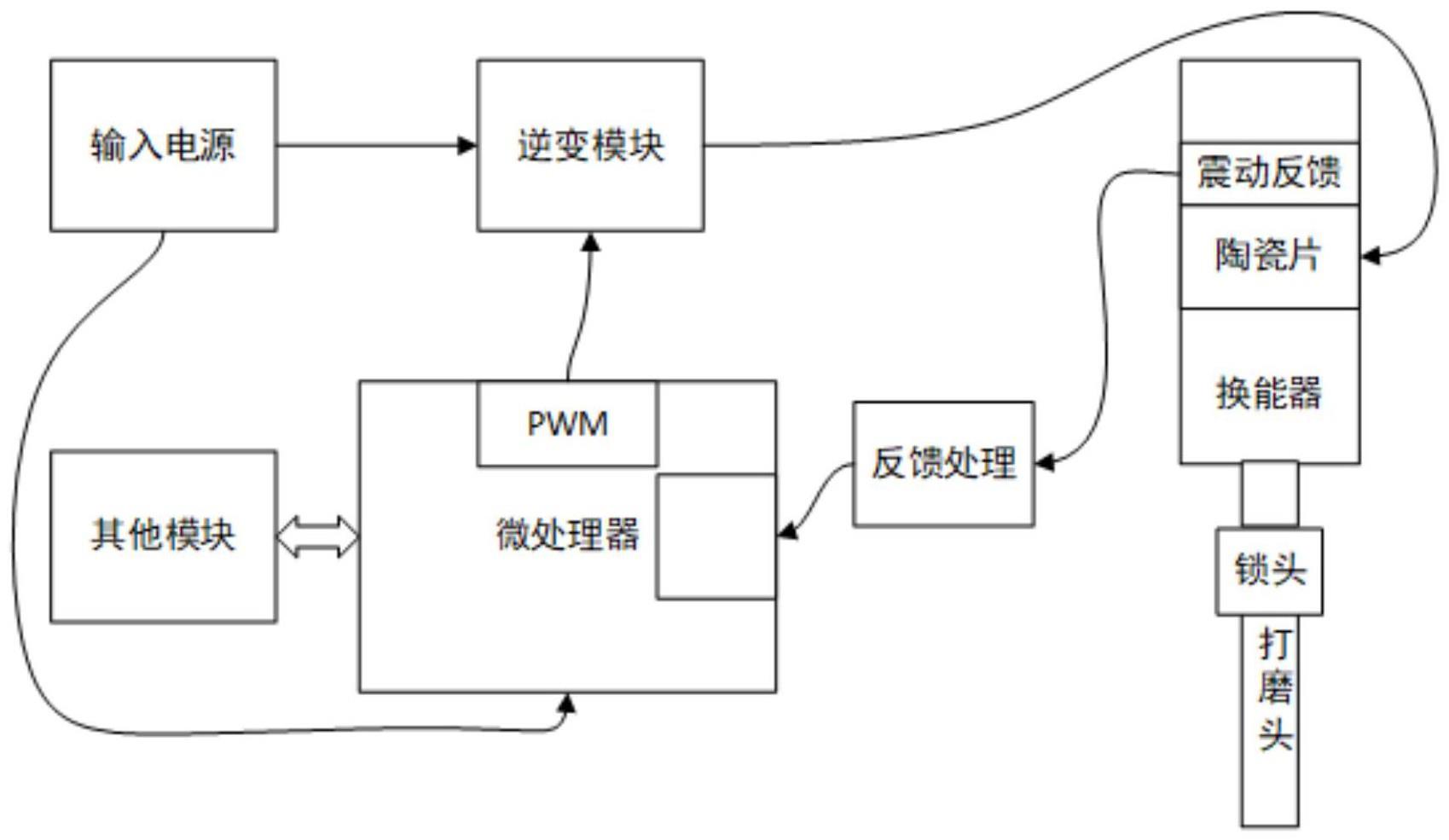
2、第一方面,一种超声波打磨系统,应用于换能器,包括微处理器、震动反馈装置、反馈处理模块和逆变模块;
3、所述微处理器与所述逆变模块连接,被配置为:
4、产生pwm信号,以驱动所述逆变模块工作;以及
5、利用所述微处理器内置的高精度定时器外设输出参考信号;
6、所述逆变模块,还与电源和所述换能器连接,并被配置为:
7、将输入的直流电转换为符合所述换能器使用的交流信号并驱动所述换能器工作;
8、所述震动反馈装置与所述反馈处理模块连接,被配置为:
9、基于所述换能器工作时生成反馈信号;
10、所述反馈处理模块与所述微处理器连接,被配置为:
11、将输入的所述反馈信号进行处理后与所述参考信号进行相位比较,以得到处理信号,并将所述处理信号传入所述微处理器中;
12、所述微处理器还被配置为:基于所述处理信号改变自身输出的pwm频率,以实现对所述换能器的频率跟踪。
13、作为优选地,所述的一种超声波打磨系统,还包括交互模块,所述交互模块与所述微处理器连接,以实现数据交互。
14、作为优选地,所述的一种超声波打磨系统,还包括接入在所述逆变模块和换能器之间的变换模块,所述变换模块采用串入电感、并入电感和调整变压器的变比中的至少一种。
15、作为优选地,所述震动反馈装置采用陶瓷片。
16、作为优选地,所述高精度定时器包括hrtim_master定时器,hrtim_timera定时器和hrtim_timerb定时器,其中,所述hrtim_master定时器作为参考定时器,所述hrtim_timera定时器和hrtim_timerb定时器的周期跟随master定时器,并使用半桥输出模式。
17、第二方面,一种超声波打磨系统的控制方法,应用于第一方面所述的一种超声波打磨系统,所述系统应用于换能器,包括微处理器、震动反馈装置、反馈处理模块和逆变模块;所述方法包括:
18、将所述微处理器配置为,在工作时,产生pwm信号,以驱动所述逆变模块工作;以及
19、利用所述微处理器内置的高精度定时器外设输出参考信号;
20、通过所述逆变模块,将输入的直流电转换为符合所述换能器使用的交流信号并驱动所述换能器工作;
21、将所述震动反馈装置与所述反馈处理模块连接,并基于所述换能器工作时生成反馈信号;其中,所述反馈信号为正弦交流信号,包括相位信息和幅度信息;
22、通过所述反馈处理模块将输入的所述反馈信号进行处理后与所述参考信号进行相位比较,以得到处理信号,并将所述处理信号传入所述微处理器中;
23、所述微处理器基于所述处理信号改变自身输出的pwm频率,以实现对所述换能器的频率跟踪。
24、作为优选地,所述方法还包括,通过所述反馈处理模块对输入的所述幅度信息进行处理,以得到震动幅度信号,具体包括:
25、首先,对所述反馈信号进行限流处理;
26、其次,对限流的信号进行分压调整后,传送至预设的运算放大器中,以得到震动幅度信号;
27、然后,通过有源低通滤波电路,对输入到所述微处理器的震动幅度信号进行进一步的滤波;
28、最后,通过所述微处理器对滤波后的震动幅度信号进行采样量化后,将其用于所述换能器输出恒定震动幅度的控制。
29、作为优选地,所述实现对所述换能器的频率跟踪,具体包括:
30、首先需要从所述微处理器内的flash或是eeprom存储器中读取设置数据;其中,所述设置数据包括最大频率、最小频率和驱动电压;
31、开启pwm输出并从最大频率以一定的速率匀速往最小频率扫描,在扫描过程中,将震动幅度和相位信息分别记录到数组中;
32、一个扫描周期完成后,在相位信息数组中找到最大值和最小值,根据得到的所述最大值和最小值重新定义一个允许的宽频率工作范围;
33、基于所述宽频率工作范围,并结合预设的设定公式得到需锁定的相位值;其中,所述需锁定的相位与所述参考信号相位差为扫描中获取的相位信息的(最大值+最小值)/2;
34、再根据反馈信号中的相位信息和所述参考信号之间的相位差,调整pwm输出频率,使得所述微处理器将根据所述相位差进行工作频率跟踪,实现对所述换能器的频率跟踪。
35、作为优选地,所述根据反馈信号中的相位信息和所述参考信号之间的相位差,调整pwm输出频率包括:
36、所述微处理器将反馈得到的相位信息经过pid计算,得出从当前相位值调整到需锁定的相位值时,所需要的频率调整量;
37、并对计算的频率调整量进行判断,如果频率调整量在预设的最大调整量以内,则根据实际计算量进行调整;
38、再根据所需要的频率调整量控制自身输出的pwm频率,以实现频率的跟踪调整。
39、作为优选地,所述恒定震动幅度的控制具体包括:
40、通过pid算法计算出基于振幅误差值所需要调整的pwm占空比量;其中,所述振幅误差值通过将所述幅度信息与预设的振幅进行计算所得;
41、判断调整量是否在阈值内,若是,则根据实际的计算调整量进行调整;
42、调整时,所述微处理器基于所述调整量将控制自身驱动输出的移相值或pwm占空比,实现震动幅度的恒定控制。
43、实施本发明实施例,通过将所述换能器工作时生成反馈信号进行处理,得到相应的相位信息,并将其与参考信号进行对比,使系统可以将工作频率锁定在任意相位角上,实现频率跟踪的数字化替代,极大的降低了温度等环境变化造成的影响,提高了可使用频段范围并且不需要调谐旋钮。
- 还没有人留言评论。精彩留言会获得点赞!