陶瓷型芯智能机器人打磨装备及打磨系统的制作方法
本技术属于磨削设备,具体涉及一种陶瓷型芯智能机器人打磨装备及打磨系统。
背景技术:
1、陶瓷型芯具有较高的高温稳定性、耐腐蚀性和机械强度,在航空航天、汽车制造、能源等领域中逐渐得到较多应用。
2、陶瓷型芯在加工时需要进行打磨,而陶瓷型芯的体积小且易碎,而且陶瓷型芯零件的公差范围较大,也即,在打磨前不同的陶瓷型芯之间的尺寸差别较大,这也是本领域中的关键性难点之一。现有技术中,针对陶瓷型芯的打磨环节常由人工操作打磨头进行打磨的,目前没有采用整个设备实现全工序打磨的技术方案,现亟需一种具有较强的适应性的陶瓷型芯的智能打磨装备来填补空缺。
技术实现思路
1、因此,本技术要解决的技术问题在于提供一种陶瓷型芯智能机器人打磨装备及打磨系统,能够优化结构布局,提高打磨工作效率。
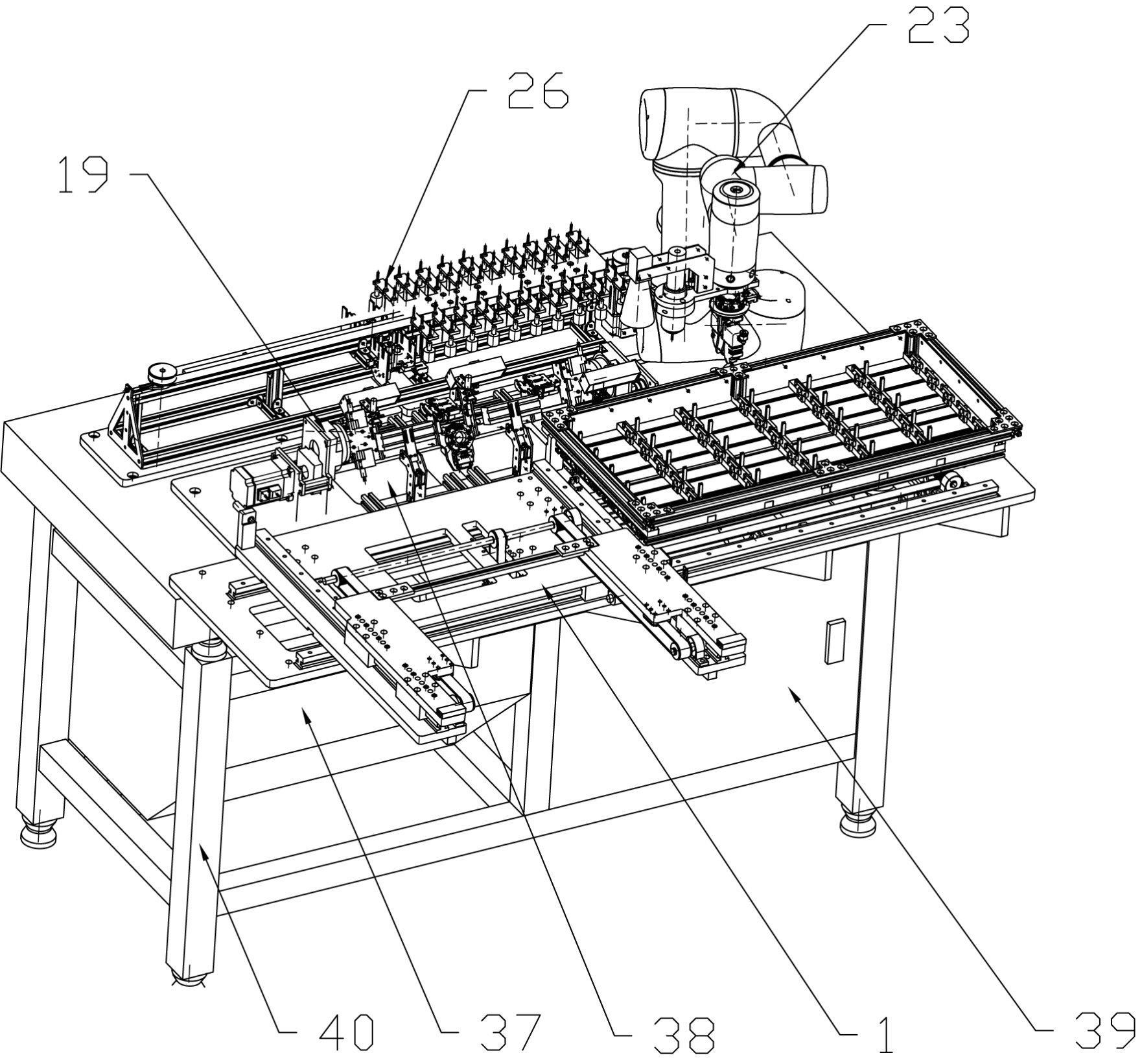
2、为了解决上述问题,本技术提供了一种陶瓷型芯智能机器人打磨装备,包括机架和设置在所述机架上的上下料装置、夹具、机械臂、刀库、夹爪放置装置、除尘装置和电控装置;
3、所述上下料装置的进出料口能够沿第一方向伸出所述机架,所述上下料装置的至少一部分在所述机架上可移动,以搬运所述陶瓷型芯;
4、所述上下料装置、所述夹具和所述刀库沿所述第一方向依次排布;
5、至少部分所述机械臂与所述夹具在第二方向上相对设置,至少部分所述机械臂在所述第一方向上位于所述上下料装置和所述刀库之间;
6、所述夹爪放置装置与所述刀库在所述第二方向上相对设置,所述夹爪放置装置在所述第一方向上与所述机械臂相对设置;
7、所述除尘装置的进尘口设置在所述夹具的下方;
8、所述电控装置分别与所述上下料装置、所述夹具、所述机械臂、所述刀库和所述除尘装置电性连接。
9、可选的,所述第一方向与所述第二方向相垂直。
10、可选的,所述上下料装置包括第一托架、第二托架和第一驱动部,所述第一托架用于承接料盘,所述料盘用于放置所述陶瓷型芯,所述第一托架沿所述第一方向延伸,所述进出料口位于所述第一托架伸出所述机架的一端,所述第二托架设置在所述机架的顶面上且沿所述第二方向延伸,所述第一托架设置在所述第二托架上,第一驱动部与所述第一托架相连接,以带动所述第一托架在所述第二托架上沿所述第二方向移动;
11、所述料盘的底部设置有第一标签,所述第二托架上设置有第一传感器,所述第一传感器位于所述第一标签沿所述第二方向的移动路径上,用于获取所述第一标签沿所述第二方向向第二托架的第一端移动到极限位置的到位信息;
12、所述第一托架包括托板、底板和第二驱动部,所述底板设置在所述第二托架上,所述托板设置在所述底板上,所述第二驱动部用于带动所述托板在所述底板上沿所述第一方向移动,所述底板上设置有第二传感器,所述第二传感器用于检测托板上是否存在所述料盘;
13、所述第一托架还设置有第三传感器和第四传感器,所述第三传感器和所述第四传感器沿所述第一方向排布,所述料盘上设置有第二标签,所述第三传感器和所述第四传感器位于所述第二标签沿所述第一方向移动的路径上,以获取所述料盘的到位信息;
14、所述第二托架上设置有第五传感器,所述第一托架上设置有第三标签,所述第五传感器位于所述第三标签沿所述第二方向的移动路径上,用于获取所述第一标签沿所述第二方向向第二托架的第二端移动到极限位置的到位信息;
15、所述机架上设置有第六传感器,所述料盘上沿所述第二方向依次设置有多个第四标签,所述第六传感器位于多个所述第四标签的移动路径上,用于获取各所述第四标签的到位信息;
16、所述第一传感器、所述第二传感器、所述第三传感器、所述第四传感器、所述第五传感器、第一驱动部和所述第二驱动部与所述电控装置电性连接。
17、可选的,所述夹具包括框架、搭设部和夹持部,所述搭设部设置在所述框架的端部,所述夹持部设置在所述框架的中部,所述陶瓷型芯搭设所述搭设部上,所述夹持部的至少一部分能够移动,以夹固所述陶瓷型芯。
18、可选的,所述机械臂上能够拆卸地设置有抓件爪和刀具,所述抓件爪用于抓取所述陶瓷型芯,所述刀具能够在所述机械臂上转动,以打磨所述陶瓷型芯。
19、可选的,所述刀库包括导向组件和刀盘,所述刀盘上设置有至少一个刀具存储区,所述导向组件包括第三驱动部、传动部和连接件,所述传动部通过所述连接件与所述刀盘相连接,所述传动部还与所述第三驱动部相连接,所述第三驱动部用于驱动所述传动部运动,以通过所述连接件带动所述刀盘沿所述第二方向移动。
20、可选的,所述抓件爪为多个,所述夹爪放置装置包括连接板、支撑柱和固定板,所述支撑柱的一端连接于所述连接板,另一端连接于所述固定板,所述固定板上形成有凸起和通孔,所述凸起的端面形成有第一斜面,所述抓件爪放置在所述固定板上,所述通孔用于收纳待用的所述抓件爪,所述抓件爪与所述凸起抵接。
21、可选的,所述除尘装置包括进风管、风机、排风管和集尘箱,所述进风管和所述排风管分别与所述风机相连接,所述进风管的进尘口设置在所述夹具的正下方,所述排风管的出尘口连通所述集尘箱。
22、可选的,所述电控装置包括电控箱和控制部,所述电控箱设置在所述机架内,所述控制部设置在所述电控箱内。
23、本技术的另一方面,提供了一种陶瓷型芯智能机器人打磨系统,包括如上述的陶瓷型芯智能机器人打磨装备,所述陶瓷型芯智能机器人打磨系统还包括货架和搬运机器人,所述货架用于存储所述陶瓷型芯,所述搬运机器人用于搬运所述陶瓷型芯。
24、有益效果:
25、本发明的实施例中所提供的一种陶瓷型芯智能机器人打磨装备及打磨系统,通过设置上下料装置能够实现自动上下料。通过设置夹具,能够实现牢固地夹固陶瓷型芯。通过设置机械臂,能够实现打磨陶瓷型芯。通过设置刀库,能够实现存储刀具,进而实现根据不同的陶瓷型芯的打磨要求而更换适合的刀具,提高了打磨装备的适用范围。通过设置夹爪放置装置,能够为夹爪提供放置位置,进而可实现根据不同的陶瓷型芯的形状和大小而更换适合夹具,提高了打磨装备的适用范围。通过设置除尘装置,能够减小打磨时形成的灰尘,净化工作环境,保障作业人员的人身健康,同时也能减少灰尘对设备造成的影响。通过将上下料装置的进出料口设置为能够沿第一方向伸出机架,能够使得上下料作业更为简单便捷,提高上下料的效率。同时通过将上下料装置设置为至少一部分在机架上可移动,可实现搬运陶瓷型芯,使得陶瓷型芯处于更容易被加工的位置,进一步提高了工作效率。通过将上下料装置、夹具和刀库沿第一方向依次排布,并使至少部分机械臂与夹具在第二方向上相对设置,能够便于机械臂对夹具上的陶瓷型芯进行加工,提高加工效率。使至少部分机械臂在第一方向上位于上下料装置和刀库之间,能够缩短上下料作业与换刀作业时机械臂的运动轨迹,同时也缩短上下料装置与夹具之间的间距,便于上下料。通过将夹爪放置装置与刀库设置为在第二方向上相对设置,且夹爪放置装置在第一方向上与机械臂相对设置,能够实现根据不同陶瓷型芯的加工要求快速更换刀具和夹爪,也提高了工作效率。通过将除尘装置的进尘口设置在夹具的下方,能够保证良好的吸尘效果,使得打磨产生的灰尘快速下降进入到吸尘装置内。通过设置电控装置,并使电控装置分别与上下料装置、夹具、机械臂、刀库和除尘装置电性连接,能够实现打磨装备的自动化运行,减少人工操作,提高智能化水平,保证了良好的加工质量的同时,也能大大提高加工效率。
- 还没有人留言评论。精彩留言会获得点赞!