一种高炉探尺控制方法、装置、电子设备及存储介质与流程
本发明涉及高炉探尺,尤其涉及一种高炉探尺控制方法、装置、电子设备及存储介质。
背景技术:
1、高炉探尺是一种用于监测高炉内部料位的设备,它对于炼铁生产过程中的高炉内部料位进行实时监测,以确保生产过程的稳定性和安全性。高炉探尺系统的探料情况是高炉上料的重要依据,准确的掌握料线是高炉正常工作的基本保障,探尺系统能否稳定运行直接关系到高炉的正常生产。对高炉探尺的控制方式包括直流驱动(dcm驱动)方式或变频器直接转矩驱动方式。
2、无论是直流驱动或是变频驱动,对探尺的控制一般都通过设置两个固定转矩值来对探料过程进行转矩控制,例如,放尺控制时采用固定的放尺转矩值驱动控制探锤下放,当探锤到达料面后则采用固定的浮尺转矩值进行控制。但是,采用固定转矩值方式,一方面,一旦固定值设置不合适很容易造成探锤无法下放或在料面发生倾倒的状况。另一方面。即便起初设置转矩值适用于当时的高炉状况,但随着设备老化、卷扬摩擦系数改变或者高炉炉内的气压、风量等因素发生较大变化时,采用固定转矩值方式也难以保证探尺的控制精度和稳定性,抗干扰能力较差。
技术实现思路
1、本发明提供了一种高炉探尺控制方法、装置、电子设备及存储介质,以解决现有高炉探尺固定转矩值控制方式,控制准确性较低、抗干扰能力较差的问题。
2、第一方面,本发明提供了一种高炉探尺控制方法,包括:
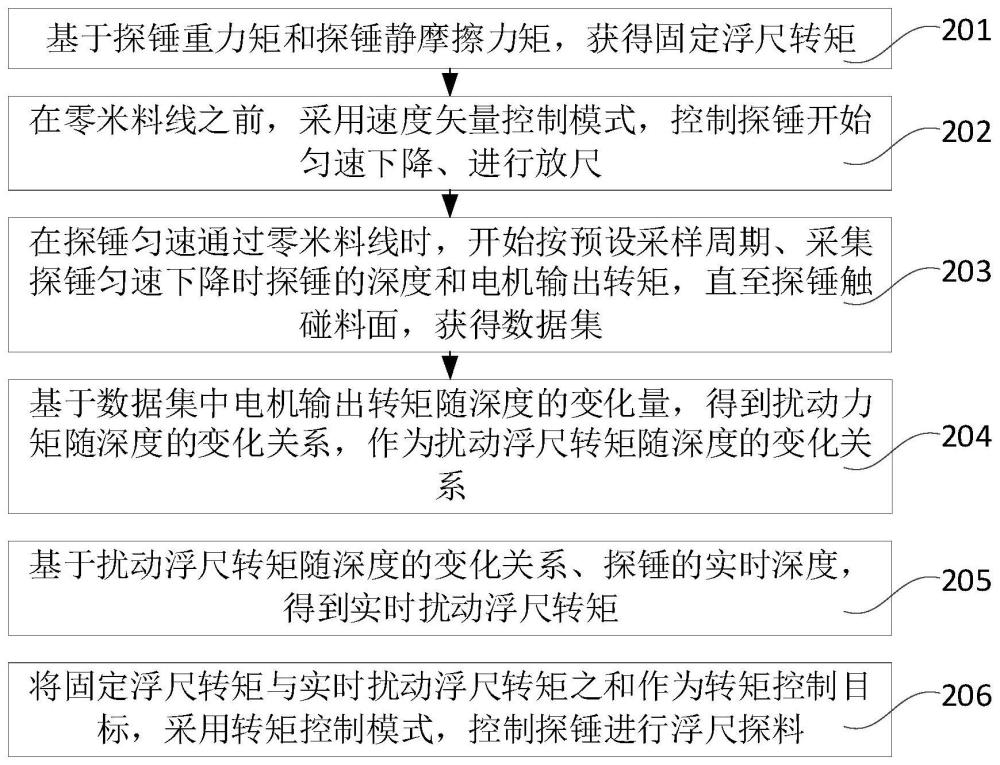
3、基于探锤重力矩和探锤静摩擦力矩,获得固定浮尺转矩。
4、在零米料线之前,采用速度矢量控制模式,控制探锤开始匀速下降、进行放尺。
5、在探锤匀速通过零米料线时,开始按预设采样周期、采集探锤匀速下降时探锤的深度和电机输出转矩,直至探锤触碰料面,获得数据集。
6、基于所述数据集中电机输出转矩随深度的变化量,得到扰动力矩随深度的变化关系,作为扰动浮尺转矩随深度的变化关系。
7、基于所述扰动浮尺转矩随深度的变化关系、探锤的实时深度,得到实时扰动浮尺转矩。
8、将固定浮尺转矩与实时扰动浮尺转矩之和作为转矩控制目标,采用转矩控制模式,控制探锤进行浮尺探料。
9、在一种可能的实现方式中,扰动力矩随深度的变化关系为一次函数关系。
10、在一种可能的实现方式中,基于所述数据集中电机输出转矩随深度的变化量,得到扰动力矩随深度的变化关系,作为扰动浮尺转矩随深度的变化关系包括:
11、基于最小二乘法对数据集中电机输出转矩随深度的变化量进行拟合计算,得到扰动力矩随深度的一次函数关系中的线性比例系数和截距值。
12、将所述扰动力矩随深度的一次函数关系,作为扰动浮尺转矩随深度的变化关系。
13、在一种可能的实现方式中,在所述获得数据集之后,还包括:
14、判断所述数据集中数据点的数量是否大于预设值。
15、相应的,所述基于所述数据集中电机输出转矩随深度的变化量,得到扰动力矩随深度的变化关系,作为扰动浮尺转矩随深度的变化关系包括:
16、若所述数据集中数据点的数量大于预设值,则基于所述数据集中电机输出转矩随深度的变化量,得到扰动力矩随深度的变化关系,作为扰动浮尺转矩随深度的变化关系。
17、在一种可能的实现方式中,在所述得到扰动浮尺转矩随深度的变化关系之后,还包括:
18、将探锤触碰到料面时的电机输出转矩减去零米料线时的电机输出转矩,得到电机输出转矩差异。
19、基于所述扰动浮尺转矩随深度的变化关系、探锤触碰到料面时的深度,得到触碰料面时的扰动浮尺转矩。
20、判断所述触碰料面时的扰动浮尺转矩是否小于等于所述电机输出转矩差异。
21、相应的,在基于所述扰动浮尺转矩随深度的变化关系、探锤的实时深度,得到实时扰动浮尺转矩之后,还包括:
22、如果所述触碰料面时的扰动浮尺转矩小于等于所述电机输出转矩差异,则所述实时扰动浮尺转矩乘以第一补偿系数,得到补偿后的实时扰动浮尺转矩。
23、如果所述触碰料面时的扰动浮尺转矩大于所述电机输出转矩差异,则将所述实时扰动浮尺转矩乘以第二补偿系数,得到补偿后的实时扰动浮尺转矩。
24、其中,第一补偿系数和第二补偿系数均大于0和小于1,第一补偿系数大于第二补偿系数。
25、在一种可能的实现方式中,所述基于探锤重力矩和探锤静摩擦力矩,获得固定浮尺转矩包括:
26、获取探锤重力矩和探锤静摩擦力矩。
27、将探锤重力矩减去探锤静摩擦力矩,作为固定浮尺转矩的上限。
28、将探锤重力矩乘以探锤最大预设倾倒角度的余弦,作为固定浮尺转矩的下限。
29、基于所述固定浮尺转矩的上限和下限,获得固定浮尺转矩。
30、在一种可能的实现方式中,在探锤匀速通过零米料线之后,还包括:
31、获取探锤匀速下降过程中的实时电机转速。
32、当所述实时电机转速低于预设速度阈值时,确定探锤触碰料面。
33、第二方面,本发明提供了一种高炉探尺控制装置,包括:
34、第一获得模块,用于基于探锤重力矩和探锤静摩擦力矩,获得固定浮尺转矩。
35、放尺控制模块,用于在零米料线之前,采用速度矢量控制模式,控制探锤开始匀速下降、进行放尺。
36、第二获得模块,用于在探锤匀速通过零米料线时,开始按预设采样周期、采集探锤匀速下降时探锤的深度和电机输出转矩,直至探锤触碰料面,获得数据集。
37、关系得到模块,用于基于所述数据集中电机输出转矩随深度的变化量,得到扰动力矩随深度的变化关系,作为扰动浮尺转矩随深度的变化关系。
38、转矩得到模块,用于基于所述扰动浮尺转矩随深度的变化关系、探锤的实时深度,得到实时扰动浮尺转矩。
39、浮尺控制模块,用于将固定浮尺转矩与实时扰动浮尺转矩之和作为转矩控制目标,采用转矩控制模式,控制探锤进行浮尺探料。
40、第三方面,本发明提供了一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
41、第四方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
42、本发明提供一种高炉探尺控制方法、装置、电子设备及存储介质。本发明将浮尺转矩划分为固定部分和扰动部分,基于固定不变的探锤自重、探锤静摩擦力确定固定部分,可确保无扰动情况下浮尺过程中探锤正常跟随料面,不悬浮、不倾倒。基于匀速放尺过程中,匀速状态下电机输出转矩随深度的变化量,确定扰动力矩随深度的变化关系、作为扰动浮尺转矩随深度的变化关系,进而基于探料深度变化确定实时的扰动浮尺转矩、作为转矩控制目标,实现浮尺探料控制。本发明基于匀速放尺状态下电机输出转矩变化,确定扰动的变化规律,进而得到随深度变化的浮尺转矩,随深度变化的浮尺转矩自适应当前高炉内干扰情况的变化,提升了控制准确性,提升了抗干扰能力。
- 还没有人留言评论。精彩留言会获得点赞!