一种碳块打磨方法、装置、设备以及存储介质与流程
本发明涉及数据处理,尤其涉及一种碳块打磨方法、装置、设备以及存储介质。
背景技术:
1、阳极碳块是一种用于电化学过程的材料,在电解铝行业作为重要材料广泛应用,通常用作电解池中的阳极材料,在制作时首先使用高纯度的石墨烧结成方形,然后继续进行表面处理使其达到使用要求,但其清理和打磨一直是一个技术难题。
2、目前的技术现状是依靠人工清理和打磨,效率低下且成本高昂。人工打磨的打磨效果不佳,并且在进行人工清理打磨时,现场生产环境嘈杂、高温并存在严重粉尘污染,会对工人健康造成负面影响。
技术实现思路
1、本发明提供了一种碳块打磨方法、装置、设备以及存储介质,以解决需要人工对碳块进行打磨的技术问题。
2、为了解决上述技术问题,本发明实施例提供了一种碳块打磨方法,包括:
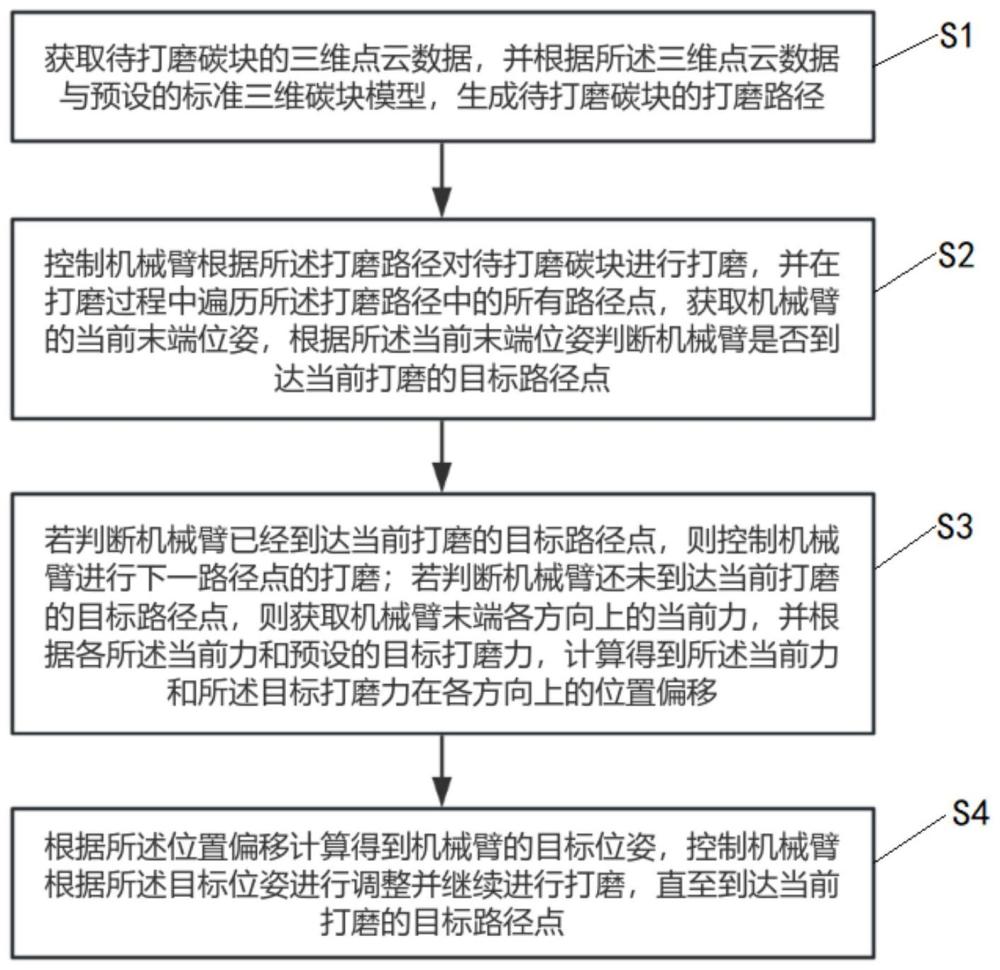
3、获取待打磨碳块的三维点云数据,并根据所述三维点云数据与预设的标准三维碳块模型,生成待打磨碳块的打磨路径;
4、控制机械臂根据所述打磨路径对待打磨碳块进行打磨,并在打磨过程中遍历所述打磨路径中的所有路径点,获取机械臂的当前末端位姿,根据所述当前末端位姿判断机械臂是否到达当前打磨的目标路径点;
5、若判断机械臂已经到达当前打磨的目标路径点,则控制机械臂进行下一路径点的打磨;若判断机械臂还未到达当前打磨的目标路径点,则获取机械臂末端各方向上的当前力,并根据各所述当前力和预设的目标打磨力,计算得到所述当前力和所述目标打磨力在各方向上的位置偏移;
6、根据所述位置偏移计算得到机械臂的目标位姿,控制机械臂根据所述目标位姿进行调整并继续进行打磨,直至到达当前打磨的目标路径点。
7、作为优选方案,所述根据所述三维点云数据与预设的标准三维碳块模型,生成待打磨碳块的打磨路径,包括:
8、根据待打磨碳块的三维点云数据,确定待打磨碳块在当前空间中的位置信息和姿态信息;
9、根据待打磨碳块在当前空间中的位置信息和姿态信息,与预设的标准三维碳块模型的边缘轮廓,生成待打磨碳块的离散路径点;
10、根据预设的路径规划约束,对所述离散路径点进行插补,生成待打磨碳块的插补路径点,并在预设的位置增加过渡路径点;其中,所述路径规划约束包括:机械臂的工作空间、碳块打磨节拍、机械臂的关节速度以及机械臂的加速度;
11、根据所述离散路径点、插补路径点以及过渡路径点,生成待打磨碳块的打磨路径。
12、作为优选方案,所述根据所述三维点云数据,确定待打磨碳块在当前空间中的位置和姿态信息,包括:
13、对所述三维点云数据进行预处理;其中,所述预处理包括:去噪和滤波;
14、提取预处理后的三维点云数据的碳块特征;其中,所述碳块特征包括:边缘和角点;
15、将所述碳块特征与预设的特征模板进行匹配,得到对应的模板匹配结果;
16、根据所述碳块特征和所述模板匹配结果,计算得到待打磨碳块在当前空间中的位置和姿态信息。
17、作为优选方案,所述获取机械臂末端各方向上的当前力,并根据各所述当前力和预设的目标打磨力,计算得到所述当前力和所述目标打磨力在各方向上的位置偏移,包括:
18、获取机械臂末端各方向上的当前力;
19、根据机械臂末端各方向上的当前力和预设的各方向上的目标打磨力,计算得到所述当前力和所述目标打磨力在各方向上的偏差;
20、根据所述当前力和所述目标打磨力在各方向上的偏差,计算得到所述当前力和所述目标打磨力在各方向上的位置偏移。
21、作为优选方案,所述根据机械臂末端各方向上的当前力和预设的各方向上的目标打磨力,计算得到所述当前力和所述目标打磨力在各方向上的偏差,包括:
22、以打磨机器人基座为原点,建立三维的机器人基座坐标系;
23、将所述机器人基座坐标系作为基准坐标系,将机械臂末端各方向上的当前力和预设的各方向上的目标打磨力转换为所述基准坐标系下的力;
24、计算在所述基准坐标系下,所述当前力和所述目标打磨力在各方向上的偏差。
25、作为优选方案,所述根据所述当前力和所述目标打磨力在各方向上的偏差,计算得到所述当前力和所述目标打磨力在各方向上的位置偏移,包括:
26、根据所述当前力和所述目标打磨力在各方向上的偏差,以及预设的基于导纳控制的mbk模型,计算得到所述当前力和所述目标打磨力在各方向上的位置偏移。
27、作为优选方案,通过以下公式计算所述当前力和所述目标打磨力在各方向上的位置偏移:
28、
29、
30、其中,fe为所述当前力和所述目标打磨力在各方向上的偏差,xe为所述当前力和所述目标打磨力在各方向上的位置偏移,t为导纳控制的周期,m为导纳控制的惯性响应;b为导纳控制的阻尼系数,k为导纳控制的弹性系数。
31、在上述实施例的基础上,本发明另一实施例提供了一种碳块打磨装置,包括:磨路径生成模块、路径点遍历模块、位置偏移计算模块以及目标位姿调整模块;
32、所述打磨路径生成模块,用于获取待打磨碳块的三维点云数据,并根据所述三维点云数据与预设的标准三维碳块模型,生成待打磨碳块的打磨路径;
33、所述路径点遍历模块,用于控制机械臂根据所述打磨路径对待打磨碳块进行打磨,并在打磨过程中遍历所述打磨路径中的所有路径点,获取机械臂的当前末端位姿,根据所述当前末端位姿判断机械臂是否到达当前打磨的目标路径点;
34、所述位置偏移计算模块,用于若判断机械臂已经到达当前打磨的目标路径点,则控制机械臂进行下一路径点的打磨;若判断机械臂还未到达当前打磨的目标路径点,则获取机械臂末端各方向上的当前力,并根据各所述当前力和预设的目标打磨力,计算得到所述当前力和所述目标打磨力在各方向上的位置偏移;
35、所述目标位姿调整模块,用于根据所述位置偏移计算得到机械臂的目标位姿,控制机械臂根据所述目标位姿进行调整并继续进行打磨,直至到达当前打磨的目标路径点。
36、在上述实施例的基础上,本发明又一实施例提供了一种电子设备,所述设备包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现上述发明实施例所述的碳块打磨方法。
37、在上述实施例的基础上,本发明又一实施例提供了一种存储介质,所述存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述存储介质所在设备执行上述发明实施例所述的碳块打磨方法。
38、相比于现有技术,本发明实施例具有如下有益效果:
39、本发明提供了一种碳块打磨方法,获取待打磨碳块的三维点云数据,并根据所述三维点云数据与预设的标准三维碳块模型,生成待打磨碳块的打磨路径;控制机械臂根据所述打磨路径对待打磨碳块进行打磨,并在打磨过程中遍历所述打磨路径中的所有路径点,获取机械臂的当前末端位姿,根据所述当前末端位姿判断机械臂是否到达当前打磨的目标路径点;若判断机械臂已经到达当前打磨的目标路径点,则控制机械臂进行下一路径点的打磨;若判断机械臂还未到达当前打磨的目标路径点,则获取机械臂末端各方向上的当前力,并根据各所述当前力和预设的目标打磨力,计算得到所述当前力和所述目标打磨力在各方向上的位置偏移;根据所述位置偏移计算得到机械臂的目标位姿,控制机械臂根据所述目标位姿进行调整并继续进行打磨,直至到达当前打磨的目标路径点。
40、通过本发明,可以实现碳块打磨过程的自动化和智能化,自动化碳块打磨技术的实现可以显著提高碳块打磨和生产的效率,减少人力成本,同时改善工作环境,保障工人身体健康。
- 还没有人留言评论。精彩留言会获得点赞!