有机肥堆肥处理箱及其智慧堆肥系统
1.本技术涉及环保技术领域,具体而言,涉及一种有机肥堆肥处理箱及其智慧堆肥系统。
背景技术:
2.相关技术中,随着秸秆和畜禽粪便等废弃物的处理逐年加大;目前处理的方式多样,相对而言环境较为友好的处理方式为生物处理方式;其中好氧处理方式多选用堆肥方式。由于堆肥手段还仅仅停留在过去对农用废弃物处理的方式;
3.堆肥过程中翻堆进程一般为人工经验控制,翻堆形式为铲车或移动式翻堆设备。整体工艺上控制系统上设计都比较粗放简单,往往容易造成堆肥失败或厌氧过度臭气产量过大。
技术实现要素:
4.本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术提出一种有机肥堆肥处理箱及其智慧堆肥系统,解决造成堆肥失败或厌氧过度臭气产量过大的问题。
5.第一方面,本发明实施例提供的一种有机肥堆肥处理箱,包括箱体和翻堆器;
6.所述箱体顶部开设有进料口,所述箱体底部开设有出料口;所述翻堆器包括翻堆电机、翻料板和无轴绞龙,所述无轴绞龙转动安装在所述箱体内,所述翻料板与所述无轴绞龙固定连接,所述翻堆电机固定在所述箱体外部,所述翻堆电机的驱动轴与所述无轴绞龙传动连接。
7.根据本技术实施例的有机肥堆肥处理箱,箱体顶部开设有进料口用于废弃物的投入,箱体底部开设有出料口,用于对处理后的物料进行排放;由于翻堆电机的驱动轴与无轴绞龙传动连接,通控制翻堆电机的驱动轴旋转,使得无轴绞龙在箱体内转动,翻料板与无轴绞龙固定连接,翻堆电机正反转,使得无轴绞龙正反转,进而推动向一侧翻料,翻料板贴合箱体内壁,无轴绞龙正反转带动翻料板将底层物料推到物料上表面,无轴绞龙多次正反转,可实现翻料板进行多层次翻料操作,在相互配合下无轴绞龙与翻料板对物料进行翻堆操作,整个过程通过电气设备控制,可实现多次或连续翻堆操作,不仅减少人工投入,而且提高堆肥效率,避免了翻堆不彻底导致厌氧过度臭气产量过大,结构简单,适用性强。
8.另外,根据本技术实施例的有机肥堆肥处理箱还具有如下附加的技术特征:
9.在本技术的一些具体实施例中,由于秸秆和畜禽粪便好氧方式处理的难点主要是秸秆和畜禽粪便粘度大,含水率高,导致通风曝气效果不佳,为此提供所述箱体固定安装有排气风机和进气风机,所述箱体顶部开设有出气口,所述箱体底部开设有进气口;所述排气风机的抽气端与所述出气口通过管路连接,所述进气风机的出气端与所述进气口通过管路连接。
10.在本技术的一些具体实施例中,还包括有混合器,所述混合器包括混合电机、混合箱以及搅拌杆,所述搅拌杆转动安装在所述混合箱内,所述混合电机固定在所述混合箱的
顶部,所述混合电机的驱动轴与所述搅拌杆同轴固定连接,所述混合箱上端开设有入料口,所述混合箱底部开设有排料口,所述排料口与所述进料口连通,使得混合均匀,保障充分反应。
11.在本技术的一些具体实施例中,还包括有输送器,所述输送器包括输送电机、输送筒和输送绞龙,所述输送绞龙转动安装在所述输送筒内,所述输送电机固定安装在所述输送筒上端,所述输送电机的驱动轴与所述输送绞龙同轴固定连接,所述输送筒下端与所述混合箱底部开设的排料口连接,所述输送筒上端侧壁开设有导料口,所述导料口与所述进料口连接。
12.在本技术的一些具体实施例中,所述输送绞龙下端延申至所述混合箱底部开设的排料口内,所述搅拌杆侧壁固定有搅拌叶,所述混合箱顶部开设的入料口表面铰接有盖板。
13.为了便于对易损结构进行拆卸更换或维护,为此,提供下面参照附图描述根据本技术实施例的有机肥堆肥处理箱的工作过程:
14.在本技术的一些具体实施例中,所述无轴绞龙端部同轴固定有花键轴套,所述花键轴套设置有两个,两个所述花键轴套对称设置在所述无轴绞龙的两端;
15.所述箱体端部嵌装有花键轴,所述花键轴与所述箱体转动连接,所述花键轴配合插接于所述花键轴套内,所述翻堆电机的驱动轴与所述花键轴同轴固定连接。
16.无轴绞龙端部同轴固定的花键轴套与箱体端部转动嵌装的花键轴相配合插接设置,由于通过箱体两端转动安装的花键轴插接花键轴套内,翻堆电机的驱动轴与花键轴同轴固定连接,通过带动花键轴旋转,进而带动与花键轴套连接的无轴绞龙旋转,使得无轴绞龙转动设置在箱体内,便于对无轴绞龙构进行拆卸更换或维护。
17.在本技术的一些具体实施例中,所述花键轴套表面开设有螺纹孔,所述螺纹孔内螺纹连接有连杆,所述连杆另一端与所述翻料板表面开设的螺纹孔螺纹连接,所述连杆开设的外螺纹的螺纹方向相反;
18.所述翻料板设置在所述无轴绞龙一侧,所述翻料板与所述无轴绞龙的轴线平行设置。
19.在本技术的一些具体实施例中,为了便于对箱内进行检修,所述箱体顶部固定有密封盖,所述密封盖表面开设有检修口,所述检修口表面覆盖有检修门,所述检修门的一侧与所述密封盖铰接,所述检修门的另一侧与所述密封盖之间安装有相卡接的卡扣。
20.在本技术的一些具体实施例中,还包括有支架,所述支架下端固定有防滑垫,所述防滑垫表面开设有安装孔,所述箱体固定安装在所述支架上端,所述控制柜安装在所述支架的一侧。
21.由于处理后的物料自身流动性较差,为了便于下料,为此提供下面参照附图描述根据本技术实施例的有机肥堆肥处理箱的工作过程:
22.在本技术的一些具体实施例中,还包括有排料机构,所述排料机构包括推料电机、推料绞龙和推料管道,所述推料管道上表面开设有通槽,该通槽与所述箱体底部开设的出料口连接,所述推料管道设置在所述箱体底部,所述推料绞龙转动安装在所述推料管道内,所述推料电机与所述推料绞龙的一端同轴固定连接,所述推料电机固定在所述推料管道的一端,所述推料管道的一端开设排出口。
23.推料管道上表面开设有通槽,该通槽与箱体底部开设的出料口连接,该通槽与出
料口连接处可以插接挡板,用于控制物料的下料,以及调节出料口的大小控制下料量,便于接收处理后的物料,推料绞龙转动安装在推料管道内,推料电机与推料绞龙的一端同轴固定连接,通过控制推料电机带动推料绞龙在推料管道内旋转,便于推动物料从推料管道的一端开设的排出口排出,方便控制排料速度,便于使用。
24.在本技术的一些具体实施例中,所述推料管道与所述支架固定连接,所述推料管道的排出口处安装有阀控机构。
25.在本技术的一些具体实施例中,所述阀控机构包括阀板、螺纹套和螺纹杆,所述阀板覆盖于所述推料管道的排出口处,所述螺纹套固定在所述阀板表面,所述支架固定连接有外壳,所述螺纹杆与所述外壳转动连接,所述螺纹套螺纹连接在所述螺纹杆表面,所述螺纹杆的一端固定有手轮。
26.第二方面,由于传统形式一般选用条垛式或槽式堆肥形式,选用自然通风曝气或底部曝气方式进行好氧堆肥,曝气方式一般为经验式、单纯氧含量控制或单纯温度控制;堆肥过程中翻堆进程一般为人工经验控制,整体工艺上控制系统上设计都比较粗放简单,往往容易造成堆肥失败,或厌氧过度臭气产量过大等问题,为此,本发明实施例另提供一种智慧堆肥系统,包括:上述任意一项所述的有机肥堆肥处理箱;以及
27.控制装置,所述控制装置包括plc控制器、温湿度控制器、温湿度探头、温度传感器、氧气浓度传感器和控制组按钮;
28.所述plc控制器的控制端通过控制按钮分别与翻堆电机、混合电机、输送电机、排气风机以及进气风机电性连接。
29.在本技术的一些具体实施例中,所述氧气浓度传感器包括出气口氧浓度传感器和进气口氧浓度传感器,所述出气口氧浓度传感器安装在所述排气风机的抽气端与所述出气口连接处;所述进气口氧浓度传感器安装在所述箱体底部开设的进气口正上方;所述出气口氧浓度传感器与所述进气口氧浓度传感器分别与所述plc控制器的信号接收端电性连接。
30.在本技术的一些具体实施例中,还包括控制柜,所述plc控制器、温湿度控制器安装在所述控制柜内,所述控制柜内固定有控制面板,所述控制面板表面固定安装有plc控制器控制操作屏、电压表、电流表以及电压转换开关;
31.还包括有报警装置和打印机,所述报警装置固定安装在所述控制柜顶部,该报警装置和打印机分别与所述plc控制器电性连接;通过利用与plc控制器电性连接的plc控制器控制操作屏上的触摸屏配合打印机对实时数值进行打印;
32.通过控制柜对混合器、输送器、翻堆器进行控制。混合器进口为待处理物料的进口;由输送器将混合器中预混后的物料输送至箱体中。
33.在本技术的一些具体实施例中,温湿度探头包括温度探头和湿度探头,所述温度探头和湿度探头设置在翻堆的物料中,所述温度探头与所述翻料板或所述无轴绞龙固定连接,所述湿度探头与所述翻料板或所述无轴绞龙固定连接;温度传感器包括中心温度传感器和边缘温度传感器,所述中心温度传感器设置于所述箱体中心处,所述边缘温度传感器安装在所述箱体边缘处;所述的温湿度控制器分别与温度探头、湿度探头以及排气风机相连,所述中心温度传感器、边缘温度传感器、温度探头以及湿度探头通过无线设备传输电信号。
34.在本技术的一些具体实施例中,所述控制组按钮安装在控制面板表面,所述控制组按钮包括曝气进程停止按钮、曝气进程启动按钮、翻堆进程停止按钮、翻堆进程启动按钮、排气进程停止按钮、排气进程启动按钮、曝气进程手动-自动旋钮、翻堆进程手动-自动旋钮、排气进程手动-自动旋钮、混合进程停止按钮、混合进程启动按钮、输送进程停止按钮、输送进程启动按钮;其中,plc控制器通过曝气进程停止按钮、曝气进程启动按钮、和曝气进程手动-自动旋钮与进气风机相连;plc控制器通过翻堆进程停止按钮、翻堆进程启动按钮和翻堆进程手动-自动旋钮与翻堆电机相连;plc控制器还与设置在箱体上的温度探头、湿度探头相连;温度控制器通过排气进程停止按钮、排气进程启动按钮和排气进程手动-自动旋钮与排气风机相连;混合进程停止按钮、混合进程启动按钮与输送电机相连;输送进程停止按钮、输送进程启动按钮与混合电机相连;
35.由于选用plc控制器plc控制器对各因素进行数值转换和控制,人工操作上反而十分简便;为了方便实际应用,在本系统工作也设计了手动、自动切换模式,以适应用户的各种要求;操作简便、自动化程度高、可通过多参数测量自动对曝气时间频率进行调节,可以有效地控制秸秆和畜禽粪便堆肥的发酵过程,达到加快发酵时间,提高发酵质量,改善发酵效率,简化操作过程,实现智慧化管理,能有效的节省人力,提高工作效率。
36.本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
附图说明
37.为了更清楚地说明本技术实施例的技术方案,下面将对本技术实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
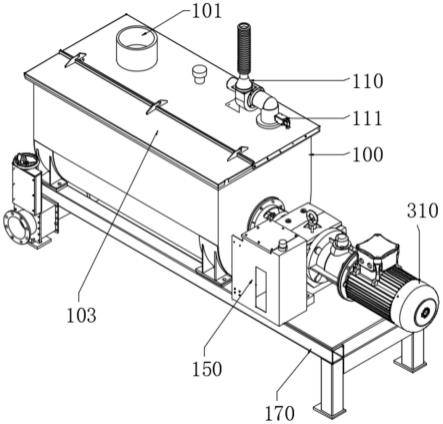
38.图1是根据本技术实施例的有机肥堆肥处理箱的结构示意图;
39.图2是根据本技术实施例的用箱体的剖开结构示意图;
40.图3是根据本技术实施例的用翻堆器的结构示意图;
41.图4是根据本技术实施例的用混合器的结构示意图;
42.图5是根据本技术实施例的用输送器的剖开结构示意图;
43.图6是根据本技术实施例的用排料机构的结构示意图;
44.图7是根据本技术实施例的用阀控机构的结构示意图。
45.图标:100、箱体;101、进料口;103、检修门;105、花键轴;110、排气风机;111、出气口氧浓度传感器;130、进气风机;131、进气口氧浓度传感器;150、控制柜;170、支架;300、翻堆器;310、翻堆电机; 330、翻料板;350、无轴绞龙;351、花键轴套;353、连杆;500、混合器; 510、混合电机;530、混合箱;550、搅拌杆;700、输送器;710、输送电机;730、输送筒;750、输送绞龙;900、排料机构;910、推料电机; 930、推料绞龙;950、推料管道;970、阀控机构;971、阀板;973、螺纹套;975、螺纹杆;977、外壳;979、手轮。
具体实施方式
46.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述。
47.为使本技术实施方式的目的、技术方案和优点更加清楚,下面将结合本技术实施方式中的附图,对本技术实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本技术一部分实施方式,而不是全部的实施方式。基于本技术中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围。
48.实施例
49.下面参考附图描述根据本技术实施例的有机肥堆肥处理箱及其智慧堆肥系统;
50.如图1-7所示,根据本技术实施例的有机肥堆肥处理箱,包括箱体100和翻堆器300;
51.箱体100顶部开设有进料口101,箱体100底部开设有出料口;翻堆器300包括翻堆电机310、翻料板330和无轴绞龙350,无轴绞龙350转动安装在箱体100内,翻料板330与无轴绞龙350固定连接,翻堆电机310固定在箱体100外部,翻堆电机310的驱动轴与无轴绞龙350传动连接。
52.根据本技术实施例的有机肥堆肥处理箱,箱体100顶部开设有进料口 101用于废弃物的投入,箱体100底部开设有出料口,用于对处理后的物料进行排放;由于翻堆电机310的驱动轴与无轴绞龙350传动连接,通控制翻堆电机310的驱动轴旋转,使得无轴绞龙350在箱体100内转动,翻料板330与无轴绞龙350固定连接,翻堆电机310正反转,使得无轴绞龙350 正反转,进而推动向一侧翻料,翻料板330贴合箱体100内壁,无轴绞龙350 正反转带动翻料板330将底层物料推到物料上表面,无轴绞龙350多次正反转,可实现翻料板330进行多层次翻料操作,在相互配合下无轴绞龙350 与翻料板330对物料进行翻堆操作,整个过程通过电气设备控制,可实现多次或连续翻堆操作,不仅减少人工投入,而且提高堆肥效率,避免了翻堆不彻底导致厌氧过度臭气产量过大,结构简单,适用性强。
53.另外,根据本技术实施例的有机肥堆肥处理箱还具有如下附加的技术特征:
54.在本具体实施例中,由于秸秆和畜禽粪便好氧方式处理的难点主要是秸秆和畜禽粪便粘度大,含水率高,导致通风曝气效果不佳,为此提供箱体100固定安装有排气风机110和进气风机130,箱体100顶部开设有出气口,箱体100底部开设有进气口;排气风机110的抽气端与出气口通过管路连接,进气风机130的出气端与进气口通过管路连接。
55.根据本技术的一些实施例,如图4-5所示,在一些具体实施例中,还包括有混合器500,混合器500包括混合电机510、混合箱530以及搅拌杆550,搅拌杆550转动安装在混合箱530内,混合电机510固定在混合箱 530的顶部,混合电机510的驱动轴与搅拌杆550同轴固定连接,混合箱530 上端开设有入料口,混合箱530底部开设有排料口,排料口与进料口101 连通,使得混合均匀,保障充分反应。
56.在具体实施例中,还包括有输送器700,输送器700包括输送电机 710、输送筒730和输送绞龙750,输送绞龙750转动安装在输送筒730内,输送电机710固定安装在输送筒730上端,输送电机710的驱动轴与输送绞龙750同轴固定连接,输送筒730下端与混合箱530底部开设的排料口连接,输送筒730上端侧壁开设有导料口,导料口与进料口101连接。
57.在本技术的一些具体实施例中,输送绞龙750下端延申至混合箱530 底部开设的排料口内,搅拌杆550侧壁固定有搅拌叶,混合箱530顶部开设的入料口表面铰接有盖板。
58.为了便于对易损结构进行拆卸更换或维护,为此,提供下面参照附图描述根据本
申请实施例的有机肥堆肥处理箱的工作过程:
59.根据本技术的一些实施例,如图1-3所示,在本技术具体实施例中,无轴绞龙350端部同轴固定有花键轴套351,花键轴套351设置有两个,两个花键轴套351对称设置在无轴绞龙350的两端;
60.箱体100端部嵌装有花键轴105,花键轴105与箱体100转动连接,花键轴105配合插接于花键轴套351内,翻堆电机310的驱动轴与花键轴105 同轴固定连接。
61.无轴绞龙350端部同轴固定的花键轴套351与箱体100端部转动嵌装的花键轴105相配合插接设置,由于通过箱体100两端转动安装的花键轴105插接花键轴套351内,翻堆电机310的驱动轴与花键轴105同轴固定连接,通过带动花键轴105旋转,进而带动与花键轴套351连接的无轴绞龙350旋转,使得无轴绞龙350转动设置在箱体100内,便于对无轴绞龙350构进行拆卸更换或维护。
62.在具体实施例中,花键轴套351表面开设有螺纹孔,螺纹孔内螺纹连接有连杆353,连杆353另一端与翻料板330表面开设的螺纹孔螺纹连接,连杆353开设的外螺纹的螺纹方向相反;
63.翻料板330设置在无轴绞龙350一侧,翻料板330与无轴绞龙350的轴线平行设置。
64.在本技术的一些具体实施例中,为了便于对箱内进行检修,箱体 100顶部固定有密封盖,密封盖表面开设有检修口,检修口表面覆盖有检修门103,检修门103的一侧与密封盖铰接,检修门103的另一侧与密封盖之间安装有相卡接的卡扣。
65.在本技术的一些具体实施例中,还包括有支架170,支架170下端固定有防滑垫,防滑垫表面开设有安装孔,箱体100固定安装在支架170 上端,控制柜150安装在支架170的一侧。
66.由于处理后的物料自身流动性较差,为了便于下料,为此提供下面参照附图描述根据本技术实施例的有机肥堆肥处理箱的工作过程:
67.根据本技术的一些实施例,如图6-7所示,在本技术的一些具体实施例中,还包括有排料机构900,排料机构900包括推料电机910、推料绞龙930和推料管道950,推料管道950上表面开设有通槽,该通槽与箱体100底部开设的出料口连接,推料管道950设置在箱体100底部,推料绞龙930转动安装在推料管道950内,推料电机910与推料绞龙930的一端同轴固定连接,推料电机910固定在推料管道950的一端,推料管道950 的一端开设排出口。
68.推料管道950上表面开设有通槽,该通槽与箱体100底部开设的出料口连接,该通槽与出料口连接处可以插接挡板,用于控制物料的下料,以及调节出料口的大小控制下料量,便于接收处理后的物料,推料绞龙930转动安装在推料管道950内,推料电机910与推料绞龙930的一端同轴固定连接,通过控制推料电机910带动推料绞龙930在推料管道950内旋转,便于推动物料从推料管道950的一端开设的排出口排出,方便控制排料速度,便于使用。
69.在具体实施例中,推料管道950与支架170固定连接,推料管道950 的排出口处安装有阀控机构970。
70.需要说明的是,阀控机构970包括阀板971、螺纹套973和螺纹杆 975,阀板971覆盖于推料管道950的排出口处,螺纹套973固定在阀板971 表面,支架170固定连接有外壳977,螺纹杆975与外壳977转动连接,螺纹套973螺纹连接在螺纹杆975表面,螺纹杆975的一端固定有手轮979。
71.第二方面,由于传统形式一般选用条垛式或槽式堆肥形式,选用自然通风曝气或底部曝气方式进行好氧堆肥,曝气方式一般为经验式、单纯氧含量控制或单纯温度控制;堆肥过程中翻堆进程一般为人工经验控制,整体工艺上控制系统上设计都比较粗放简单,往往容易造成堆肥失败,或厌氧过度臭气产量过大等问题,为此,本发明实施例另提供一种智慧堆肥系统,包括:上述任意一项的有机肥堆肥处理箱;以及
72.控制装置,控制装置包括plc控制器、温湿度控制器、温湿度探头、温度传感器、氧气浓度传感器和控制组按钮;
73.plc控制器的控制端通过控制按钮分别与翻堆电机310、混合电机510、输送电机710、排气风机110以及进气风机130电性连接。
74.在本技术的一些具体实施例中,氧气浓度传感器包括出气口氧浓度传感器111和进气口氧浓度传感器131,出气口氧浓度传感器111安装在排气风机110的抽气端与出气口连接处;进气口氧浓度传感器131安装在箱体100底部开设的进气口正上方;出气口氧浓度传感器111与进气口氧浓度传感器131分别与plc控制器的信号接收端电性连接。
75.在本技术的一些具体实施例中,还包括控制柜150,plc控制器、温湿度控制器安装在控制柜150内,控制柜150内固定有控制面板,控制面板表面固定安装有plc控制器控制操作屏、电压表、电流表以及电压转换开关;
76.还包括有报警装置和打印机,报警装置固定安装在控制柜150顶部,该报警装置和打印机分别与plc控制器电性连接;通过利用与plc控制器电性连接的plc控制器控制操作屏上的触摸屏配合打印机对实时数值进行打印;
77.通过控制柜150对混合器500、输送器700、翻堆器300进行控制。混合器500进口为待处理物料的进口;由输送器700将混合器500中预混后的物料输送至箱体100中。
78.在本技术的一些具体实施例中,温湿度探头包括温度探头和湿度探头,温度探头和湿度探头设置在翻堆的物料中,温度探头与翻料板330或无轴绞龙350固定连接,湿度探头与翻料板330或无轴绞龙350固定连接;温度传感器包括中心温度传感器和边缘温度传感器,中心温度传感器设置于箱体100中心处,边缘温度传感器安装在箱体100边缘处;的温湿度控制器分别与温度探头、湿度探头以及排气风机110相连,中心温度传感器、边缘温度传感器、温度探头以及湿度探头通过无线设备传输电信号。
79.在本技术的一些具体实施例中,控制组按钮安装在控制面板表面,控制组按钮包括曝气进程停止按钮、曝气进程启动按钮、翻堆进程停止按钮、翻堆进程启动按钮、排气进程停止按钮、排气进程启动按钮、曝气进程手动-自动旋钮、翻堆进程手动-自动旋钮、排气进程手动-自动旋钮、混合进程停止按钮、混合进程启动按钮、输送进程停止按钮、输送进程启动按钮;其中,plc控制器通过曝气进程停止按钮、曝气进程启动按钮、和曝气进程手动-自动旋钮与进气风机130相连;plc控制器通过翻堆进程停止按钮、翻堆进程启动按钮和翻堆进程手动-自动旋钮与翻堆电机310相连;plc控制器还与设置在箱体100上的温度探头、湿度探头相连;温度控制器通过排气进程停止按钮、排气进程启动按钮和排气进程手动-自动旋钮与排气风机110相连;混合进程停止按钮、混合进程启动按钮与输送电机710相连;输送进程停止按钮、输送进程启动按钮与混合电机510相连;
80.由于选用plc控制器plc控制器对各因素进行数值转换和控制,人工操作上反而十分简便;为了方便实际应用,在本系统工作也设计了手动、自动切换模式,以适应用户的各
种要求;操作简便、自动化程度高、可通过多参数测量自动对曝气时间频率进行调节,可以有效地控制秸秆和畜禽粪便堆肥的发酵过程,达到加快发酵时间,提高发酵质量,改善发酵效率,简化操作过程,实现智慧化管理,能有效的节省人力,提高工作效率。
81.混合电机510通过手动开关控制,由混合进程启动按钮、混合进程停止按钮对混合电机510进行停启控制。
82.输送电机710通过手动开关控制,由输送进程启动按钮、输送进程停止按钮对输送电机710进行停启控制。
83.对箱体100的曝气、翻堆、排气三个进程进行控制,三个进程皆为手动-自动转换控制,其中曝气、翻堆二个进程由plc控制器负责自动控制,排气进程由温湿度控制器负责自动控制。
84.出气口氧浓度传感器111、中心温度传感器、边缘温度传感器、进气口氧浓度传感器131与plc控制器相连;plc控制器与报警装置、曝气进程手动-自动旋钮、翻堆进程手动-自动旋钮、排气进程手动-自动旋钮相连;plc 控制器、曝气进程停止按钮、曝气进程启动按钮、进气风机130与曝气进程手动-自动旋钮相连;plc控制器、翻堆进程停止按钮、翻堆进程启动按钮、翻堆电机310与翻堆进程手动-自动旋钮相连;温湿度控制器、排气进程停止按钮、排气进程启动按钮、排气风机110与排气进程手动-自动旋钮相连;混合电机510与混合进程停止按钮、混合进程启动按钮相连;输送电机710与输送进程停止按钮、输送进程启动按钮相连。电压表、电流表与电压转换开关均采用常规产品,三者组合使用负责转换测量接入控制柜 150的三相电压电流。
85.对曝气进程的控制由曝气进程手动-自动旋钮负责进行手动-自动控制的切换。手动控制时由曝气进程启动按钮、曝气进程停止按钮控制进气风机130的停启;自动控制时为温度控制与氧浓度时间控制联合控制plc控制器负责曝气进程的自动控制。温度控制由箱体100中心温度传感器采集温度数值,而后将数值发送至plc控制器,通过plc控制器中设定的数值来判断是否进行氧浓度时间控制。当plc控制器接收到的数值高于设定值时,进气风机130就常开。当plc控制器接收到的数值低于设定值时,根据氧浓度时间控制的方式控制进气风机130运行和停止。氧浓度时间控制由出气口氧浓度传感器111、进气口氧浓度传感器131采集出气口与进气口的氧浓度数值,而后将数值发送至plc控制器,通过plc控制器中设定曝气的时间频率数值,通过此数值对plc控制器内置时间继电器进行设定来控制进气风机130的间断启停。
86.对翻堆进程的控制,由翻堆进程手动-自动旋钮负责进行手动-自动控制的切换;手动控制时由翻堆进程启动按钮、翻堆进程停止按钮控制翻堆电机310的启停;自动控制时由中心温度传感器、边缘温度传感器采集箱体100中心与箱体100边缘的温度数值,而后将数值发送至plc控制器,通过plc控制器中设定的程序计算出温度差值,用温度差值与设定的数值比较来判断是否进行间断启停控制。当程序计算出的温度差值高于plc控制器中的设定值,且曝气进程在有效时间范围内不能有效减少温度差值时,翻堆电机310就常开进行翻堆以减少温度差值;当程序计算出的温度差值低于plc控制器中的设定值时,通过plc控制器内置时间继电器上的设定对翻堆电机310进行间断启停控制。
87.对排气进程的控制,由排气进程手动-自动旋钮负责进行手动-自动控制的切换。手动控制时由排气进程启动按钮、排气进程停止按钮控制排气风机110的停启;自动控制时
由温度探头、湿度探头采集物料内的温度、湿度数值,而后将数值发送至温湿度控制器,通过温湿度控制器设定的数值与采集的数值比较进行启停控制。当温湿度控制器接收到的数值大于设定值时排气风机110启动,低于设定值时排气风机110停止。
88.报警功能随曝气、翻堆二个进程启动而启动,由中心温度传感器采集箱体100中心的温度数值发送至plc控制器中,plc控制器将从中心温度传感器处收到的数值和plc控制器通过设定值生成曲线进行比较,当收到的数值超出了设定的曲线变化范围时,开启报警装置进行报警。
89.本实施例中各器件的具体选用的产品说明如下:
90.电压表选用正泰的电压表6l2-v450v,电流表选用正泰的电流表 6l2-a50/5a,电压转换开关选用正泰的转换开关lw5/16yh3-3。报警装置选用上海二工的蜂鸣器ad16-22sm。温湿度控制器选用北京北方大河的温湿度控制器ht10-1mn。温度探头30、湿度探头31为温湿度控制器ht10-1mn 自带。
91.plc控制器选用西门子s7-200系列,配有触摸屏、模拟量输入模块、温度输入模块。打印机选用天津顾铭的嵌进式微型热敏打印机gmp-i6。曝气进程停止按钮、翻堆进程停止按钮、排气进程停止按钮选用施耐德按钮 xb2ea14红,曝气进程启动按钮、翻堆进程启动按钮、排气进程启动按钮选用施耐德按钮xb2ea135绿。
92.曝气进程手动-自动旋钮,翻堆进程手动-自动旋钮,排气进程手动-自动旋钮选用施耐德旋钮xb2ed21c。混合进程停止按钮、输送进程停止按钮选用施耐德的带灯按钮xb2ew33m1c绿,混合进程启动按钮、输送进程启动按钮选用施耐德的带灯按钮xb2ew34m1c红。控制柜150为自制锈钢柜。混合电机510选用杰牌传动的jrtfaf87d112m4/56.75/4kw减速机。输送电机710选用杰牌传动的jrtfaf57d80n4/0.75/68.22减速机。排气风机110 选用卡固电设的ka1238ha3-2(ip55)mg风机。翻堆电机310选用杰牌传动的jrtfaf107/132m4/7.5kw减速机。进气风机130选用上海应达风机厂的9-19型离心风机。
93.箱体100的中心温度传感器、箱体100的边缘温度传感器选用杭州热电偶厂的铂电阻wzp3-330。出气口氧浓度传感器111、进气口氧浓度传感器131选用科力恒氧浓度探测仪sp-4101。打印机嵌进式微型热敏打印机 gmp-i6与西门子s7-200系列plc控制器配备的触摸屏相连,可对西门子 s7-200系列plc控制器的数据进行打印。plc控制器西门子s7-200系列,通过触摸屏进行参数设定。
94.工作过程为:将秸秆和畜禽粪便物料放入混合箱550内,按下混合进程启动按钮对物料进行预混并送入输送器700中,当物料进入输送器700 后按下输送进程启动按钮将预混后的物料输送至箱体100中。当全部物料预混完成后按下混合进程停止按钮停止混合电机510运行;当全部物料输送至箱体100内后按下输送进程停止按钮停止输送电机710运行,当全部物料进入箱体100后操作曝气进程手动-自动旋钮、翻堆进程手动-自动旋钮、排气进程手动-自动旋钮三个旋钮,选择手动或自动控制。
95.当手动控制时将曝气进程手动-自动旋钮、翻堆进程手动-自动旋钮、排气进程手动-自动旋钮三个旋钮转到手动位置,然后按照堆肥的要求对曝气进程停止按钮、曝气进程启动按钮、翻堆进程停止按钮、翻堆进程启动按钮、排气进程停止按钮、排气进程启动按钮进行操作控制翻堆器300运行直到堆肥完成。
96.当自动控制时将曝气进程手动-自动旋钮、翻堆进程手动-自动旋钮、排气进程手
动-自动旋钮三个旋钮转到自动位置,箱体100中心温度传感器、箱体100边缘温度传感器、出气口氧浓度传感器111、进气口氧浓度传感器 131开始采集数值并发送至plc控制器,然后通过plc控制器上的设定对翻堆电机310运行进行控制,而当堆肥中温度异常时plc控制器接收到箱体 100中心温度传感器采集的数值,通过plc控制器上的设定开启报警装置进行报警。同时温度探头、湿度探头也将采集数值发送至温湿度控制器,通过温湿度控制器上的设定对曝气、翻堆进程中的物料进行降温及抽湿。当翻堆器300工作时间达到plc控制器内置时间继电器上设定的时间,翻堆器300工作停止进行出料。通过采用手动-自动切换功能通过排气进程手动
‑ꢀ
自动旋钮、曝气进程手动-自动旋钮、翻堆进程手动-自动旋钮三个旋钮来实现。
97.根据本技术实施例的排气风机110、出气口氧浓度传感器111、进气风机130、进气口氧浓度传感器131、翻堆电机310、混合电机510、输送电机710以及推料电机910的其他构成以及操作对于本领域普通技术人员而言都是已知的,这里不再详细描述。
98.需要说明的是,排气风机110、出气口氧浓度传感器111、进气风机 130、进气口氧浓度传感器131、翻堆电机310、混合电机510、输送电机710 以及推料电机910具体的型号规格需根据该装置的实际规格等进行选型确定,具体选型计算方法采用本领域现有技术,故不再详细赘述。
99.排气风机110、出气口氧浓度传感器111、进气风机130、进气口氧浓度传感器131、翻堆电机310、混合电机510、输送电机710以及推料电机910 的供电及其原理对本领域技术人员来说是清楚的,在此不予详细说明。
100.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括要素的过程、方法、物品或者设备中还存在另外的相同要素。
101.需要说明的是,当元件被称为“固定于”、“设置于”、“固设于”或“安设于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。进一步地,当一个元件被认为是“固定连接”另一个元件,二者可以是可拆卸连接方式的固定,也可以不可拆卸连接的固定,如套接、卡接、一体成型固定、焊接等,在现有技术中可以实现,在此不再累赘。当元件与另一个元件相互垂直或近似垂直是指二者的理想状态是垂直,但是因制造及装配的影响,可以存在一定的垂直误差。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
102.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
103.以上仅为本技术的实施例而已,并不用于限制本技术的保护范围,对于本领域的
技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
104.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应所述以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1