1.本发明涉及属于生物样本实验器材生产设备技术领域,特别涉及一种自动显微操作针拉制仪和拉制方法。
背景技术:2.在辅助生殖医疗以及生物胚胎研究过程中,往往需要利用显微操作针对生物胚胎的组织样本进行收集,再送入显微镜等分析仪器中进行观察和实验分析。而在胚胎培养过程中,由于胚胎发育不同阶段,在试验阶段进行操作时需要用到不同管径和长度的显微操作针。针对不同的实验需求,显微操作针可能需要实验人员进行现场制备。
3.在相关技术中,试验人员在对显微操作针进行拉制操作时,通常会利用两个间距可调的夹持装置对作为原材料的玻璃管两端进行夹持。之后利用酒精灯或者液化气点火器对玻璃管进行烧制加热,通过手动调整夹持装置的间距以将玻璃管拉制成不同的长度和管径,最后利用医用砂轮片对玻璃管进行切割以形成断口,得到能够使用的显微操作针。
4.采用相关技术中的方法对显微操作针进行制备,其采用酒精灯或者液化气点火器等明火设备对玻璃管进行加热,燃烧过程中的温度容易受外界环境影响导致加热不均匀,且容易对实验室环境造成污染。同时采用人工操作进行手动拉伸烧制,容易造成尺寸偏差导致无法准确控制拉伸长度和玻璃管的管径,导致显微操作针的制备精度低,材料报废率高。
技术实现要素:5.本发明实施例提供了一种自动显微操作针拉制仪和拉制方法,能够在试验室内对显微操作针进行流程化的自动拉制,提高制备精度,降低报废率。技术方案如下:
6.第一方面,本发明实施例提供了一种自动显微操作针拉制仪,该自动显微操作针拉制仪包括:
7.立式支架,第一夹持组件、第二夹持组件、加热装置、断针装置和控制器,所述第一夹持组件、所述第二夹持组件、所述加热装置和所述断针装置均与所述控制器电连接,
8.所述立式支架具有安装面;
9.所述第一夹持组件包括第一滑轨、第一滑块、第一夹爪和第一驱动装置,所述第一滑轨安装于所述安装面上,所述第一滑轨沿竖直方向布置,所述第一滑块可滑动地安装于所述第一滑轨上,所述第一夹爪安装于所述第一滑块上,所述第一驱动装置设置于所述立式支架上与所述第一滑块传动连接;
10.所述第二夹持组件包括第二滑轨、第二滑块、第二夹爪和第二驱动装置,所述第二滑轨安装于所述安装面上,所述第二滑轨与所述第一滑轨平行且设置于所述第一滑轨正下方,所述第二滑块可滑动地安装于所述第二滑轨上,所述第二夹爪安装于所述第二滑块上,所述第二驱动装置设置于所述立式支架上且与所述第二滑块传动连接;
11.所述加热装置安装于所述安装面上且位于所述第一滑轨和所述第二滑轨之间,所
述加热装置上设置有供玻璃管穿过的加热孔,所述加热孔内设置有加热器;
12.所述断针装置安装于所述安装面上且位于所述加热装置和所述第二滑轨之间,所述断针装置用于切割位于所述加热装置和所述第二夹爪之间的玻璃管。
13.可选地,所述断针装置包括第三滑轨、第三滑块、连接臂、切割刃和第三驱动装置,所述第三滑轨安装于所述安装面上,所述第三滑轨沿水平方向布置且与所述安装面平行,所述第三滑块可滑动地安装在所述第三滑轨上,所述连接臂的一端与所述第三滑块连接,所述切割刃通过所述连接臂与所述第三滑块连接,所述第三驱动装置与所述第三滑轨连接,所述第三驱动装置与所述第三滑轨传动连接。
14.可选地,所述第三滑块上具有避让复位组件,所述避让复位组件包括伸缩杆和复位座,所述伸缩杆与所述复位座沿垂直于所述安装面的方向间隔布置,所述伸缩杆位于所述复位座和所述安装面之间,所述伸缩杆垂直于所述安装面,所述复位座上可滑动的穿设有复位杆,所述复位杆与所述伸缩杆同轴,所述复位杆的一端位于所述复位座和所述伸缩杆之间,所述复位杆的另一端位于所述复位座背向所述安装面的一侧,所述复位杆上套设有弹簧,所述弹簧的一端与所述复位杆的另一端连接,所述弹簧的另一端与所述复位座连接,所述连接臂的中部通过转轴与所述第三滑块转动连接,所述转轴沿竖直方向布置,所述连接臂的一端伸入所述伸缩杆和所述复位座之间,所述伸缩杆和所述复位杆的一端分别由所述连接臂的两侧与所述连接臂抵接。
15.可选地,所述切割刃与所述连接臂可拆卸连接。
16.可选地,所述切割刃为呈圆盘状的钨钢刀片。
17.可选地,所述第一驱动装置、所述第二驱动装置和所述第三驱动装置为伺服电机。
18.可选地,所述加热器为铂铱合金环,所述铂铱合金换围绕所述加热孔的孔壁设置。
19.可选地,所述自动显微操作针拉制仪还包括管托,所述管托安装于所述第一滑块上且位于所述第一夹爪上方。
20.可选地,所述自动显微操作针拉制仪还包括外箱体,所述立式支架,所述第一夹持组件、所述第二夹持组件、所述加热装置和所述断针装置均安装于所述外箱体内部,所述外箱体上具有可开合的透明视窗。
21.第二方面,本发明实施例提供了一种拉制方法,基于前述第一方面所述的自动显微操作针拉制仪实现,该拉制方法包括:
22.对需要拉制的玻璃管进行上料,利用所述第一夹爪夹紧所述玻璃管的中部,利用所述第一驱动装置驱动所述第一滑块在所述第一滑轨上滑动,使所述玻璃管穿过所述加热孔,利用所述第二夹爪夹紧所述玻璃管的下端;
23.启动所述加热器,利用所述加热装置对所述玻璃管进行加热,达到设定加热时间后停止加热;
24.利用所述第二驱动装置驱动所述第二滑块在所述第二滑轨上滑动,对所述玻璃管进行拉制;
25.利用所述断针装置切割所述玻璃管,使所述玻璃管断开;
26.利用所述第一驱动装置驱动所述第一滑块回到初始位置,并松开所述第一夹爪,完成显微操作针的拉制。
27.本发明实施例提供的技术方案带来的有益效果至少包括:
28.采用本发明实施例所提供的自动限位操作针拉制仪对显微操作针进行制备,其通过间距可调整的第一夹爪和第二夹爪在竖直方向上对玻璃管进行夹持,并在配套的第一驱动装置和第二驱动装置驱动下进行指定距离的拉制,避免了人工操作造成尺寸偏差导致无法准确控制拉伸长度和玻璃管的管径的问题。同时在拉伸前的加热过程中,对于玻璃管的待拉制段落,在其径向上采用加热孔进行360
°
的包围式加热,使待拉制段落受热均匀,减少外界环境对加热过程的干扰。实现在试验室内对显微操作针进行流程化的自动拉制,提高制备精度,降低报废率。
附图说明
29.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
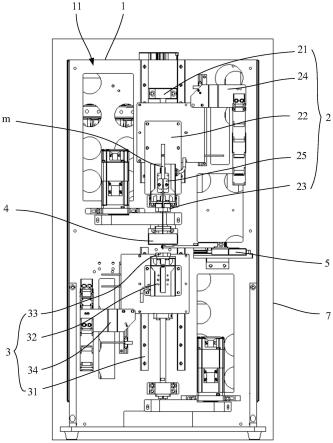
30.图1是本发明实施例提供的自动显微操作针拉制仪的正视结构示意图;
31.图2是本发明实施例提供的自动显微操作针拉制仪的左视结构俯视图;
32.图3是本发明实施例提供的自动显微操作针拉制仪的俯视结构仰视图;
33.图4是本发明实施例提供的加热装置的俯视结构示意图;
34.图5是本发明实施例提供的断针装置的立体结构示意图;
35.图6是本发明实施例提供的断针装置的俯视结构示意图;
36.图7是本发明实施例提供的断针装置的正视结构示意图;
37.图8是本发明实施例提供的断针装置的右视结构示意图;
38.图9是本发明实施例提供的外箱体的结构示意图;
39.图10是本发明实施例提供的自动显微操作针拉制仪的控制结构框图;
40.图11是本发明实施例提供的拉制方法的流程图。
具体实施方式
41.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地详细描述。
42.在相关技术中,试验人员在对显微操作针进行拉制操作时,通常会利用两个间距可调的夹持装置对作为原材料的玻璃管两端进行夹持。之后利用酒精灯或者液化气点火器对玻璃管进行烧制加热,通过手动调整夹持装置的间距以将玻璃管拉制成不同的长度和管径,最后利用医用砂轮片对玻璃管进行切割以形成断口,得到能够使用的显微操作针。
43.采用相关技术中的方法对显微操作针进行制备,其采用酒精灯或者液化气点火器等明火设备对玻璃管进行加热,燃烧过程中的温度容易受外界环境影响导致加热不均匀,且容易对实验室环境造成污染。同时采用人工操作进行手动拉伸烧制,容易造成尺寸偏差导致无法准确控制拉伸长度和玻璃管的管径,导致显微操作针的制备精度低,材料报废率高。
44.图1是本发明实施例提供的自动显微操作针拉制仪的正视结构示意图。图2是本发明实施例提供的自动显微操作针拉制仪的左视结构俯视图。图3是本发明实施例提供的自
动显微操作针拉制仪的俯视结构仰视图。图4是本发明实施例提供的加热装置的俯视结构示意图。图5是本发明实施例提供的断针装置的立体结构示意图。图6是本发明实施例提供的断针装置的俯视结构示意图。图7是本发明实施例提供的断针装置的正视结构示意图。图8是本发明实施例提供的断针装置的右视结构示意图。图9是本发明实施例提供的外箱体的结构示意图。图10是本发明实施例提供的自动显微操作针拉制仪的控制结构框图。如图1至图10所示,通过实践,本技术人提供了一种自动显微操作针拉制仪,包括立式支架1,第一夹持组件2、第二夹持组件3、加热装置4、断针装置5和控制器6,第一夹持组件2、第二夹持组件3、加热装置4和断针装置5均与控制器6电连接。
45.立式支架1具有安装面11。
46.第一夹持组件2包括第一滑轨21、第一滑块22、第一夹爪23和第一驱动装置24。第一滑轨21安装于安装面11上,第一滑轨21沿竖直方向布置。第一滑块22可滑动地安装于第一滑轨21上,第一夹爪23安装于第一滑块22上,第一驱动装置24设置于立式支架1上与第一滑块22传动连接。
47.第二夹持组件3包括第二滑轨31、第二滑块32、第二夹爪33和第二驱动装置34。第二滑轨31安装于安装面11上,第二滑轨31与第一滑轨21平行且设置于第一滑轨21正下方。第二滑块32可滑动地安装于第二滑轨31上,第二夹爪33安装于第二滑块32上,第二驱动装置34设置于立式支架1上且与第二滑块32传动连接。
48.加热装置4安装于安装面11上且位于第一滑轨21和第二滑轨31之间,加热装置4上设置有供玻璃管m穿过的加热孔41,加热孔41内设置有加热器42。
49.断针装置5安装于安装面11上且位于加热装置4和第二滑轨31之间,断针装置5用于切割位于加热装置4和第二夹爪33之间的玻璃管m。
50.在本发明实施中,可以通过控制器6接受外部计算机的控制指令,或者执行其内部预设的控制指令来对自动显微操作针拉制仪的各零部件进行控制操作。在需要制备显微操作针时,试验人员可以拿取需要拉制的玻璃管m进行上料。将玻璃管m对准加热装置4上的加热孔41后,首先利用第一夹爪23夹紧玻璃管m的中部,之后利用第一驱动装置24驱动第一滑块22在第一滑轨21上下降,带动玻璃管m穿过加热孔41,直到玻璃管m的下端滑动到第二夹爪33的位置停止,之后利用第二夹爪33夹紧玻璃管m的底部,完成玻璃管m的装夹。之后启动加热装置4内的加热器42对位于加热孔41内部的玻璃管m拉制段落进行加热,在到达设定加热时间后停止加热。之后利用第二驱动装置34驱动第二滑块32在第二滑轨31上下降至设定位置,将加热后的玻璃管m拉长到指定的长度。最后利用断针装置5由加热装置4和第二滑轨31之间对玻璃管m的拉制段落进行切割,使玻璃管m断开。利用第一驱动装置24驱动第一滑块22上升并回到初始位置,松开第一夹爪23后试验人员即可将第一夹爪23夹持的拉长并切割后的玻璃管m取下,完成显微操作针的制备。
51.采用本发明实施例所提供的自动限位操作针拉制仪对显微操作针进行制备,其通过间距可调整的第一夹爪23和第二夹爪33在竖直方向上对玻璃管m进行夹持,并在配套的第一驱动装置24和第二驱动装置34驱动下进行指定距离的拉制,避免了人工操作造成尺寸偏差导致无法准确控制拉伸长度和玻璃管的管径的问题。同时在拉伸前的加热过程中,对于玻璃管m的待拉制段落,在其径向上采用加热孔41进行360
°
的包围式加热,使待拉制段落受热均匀,减少外界环境对加热过程的干扰。实现在试验室内对显微操作针进行流程化的
自动拉制,提高制备精度,降低报废率。
52.可选地,断针装置5包括第三滑轨51、第三滑块52、连接臂53、切割刃54和第三驱动装置55,第三滑轨51安装于安装面11上,第三滑轨51沿水平方向布置且与安装面11平行,第三滑块52可滑动地安装在第三滑轨51上,连接臂53的一端与第三滑块52连接,切割刃54通过连接臂53与第三滑块52连接,第三驱动装置55与第三滑轨51连接,第三驱动装置55与第三滑轨51传动连接。示例性地,在本发明实施例中,在竖直方向上,断针装置5整体位于加热装置4和第二滑轨31之间。在进行玻璃管m的上料、加热和拉制时,第三滑块52位于第三滑轨51上距离加热装置4和第二滑轨31最远的一端。此时切割刃54距离装夹的玻璃管m仍具有一定间距。而在加热拉制完毕后,则可以利用第三驱动装置55驱动第三滑块52向靠近加热装置4和第二滑轨31的一端滑动,进而带动连接臂53以及位于连接臂53上的切割刃54向玻璃管m移动,切割刃54在接触玻璃管m后对玻璃管进行切割,并且在将玻璃管m切断后重新跟随第三滑块52滑动回初始位置,为一下次制备让出上料空间。
53.可选地,第三滑块52上具有避让复位组件56,避让复位组件56包括伸缩杆561和复位座562,伸缩杆561与复位座562沿垂直于安装面11的方向间隔布置,伸缩杆561位于复位座562和安装面11之间,伸缩杆561垂直于安装面11,复位座562上可滑动的穿设有复位杆563,复位杆563与伸缩杆561同轴,复位杆563的一端位于复位座562和伸缩杆561之间,复位杆563的另一端位于复位座562背向安装面11的一侧,复位杆563上套设有弹簧564,弹簧564的一端与复位杆563的另一端连接,弹簧564的另一端与复位座562连接,连接臂53的中部通过转轴565与第三滑块52转动连接,转轴565沿竖直方向布置,连接臂53的一端伸入伸缩杆561和复位座562之间,伸缩杆561和复位杆563的一端分别由连接臂53的两侧与连接臂53抵接。示例性地,在本发明实施例中,当利用第三驱动装置55驱动第三滑块52向靠近加热装置4和第二滑轨31的一端滑动的同时,伸缩杆561要会同步伸长,推动与其抵接的连接臂53一端,进而使连接臂53绕转轴565转动,连接有切割刃54的连接臂53的另一端则会向安装面11靠近。此时伸缩杆561持续提供顶紧力,复位杆563相应的向复位座562背向安装面11的一侧顶出并使弹簧564拉伸。在第三滑块52滑动到位后,由于连接臂53的旋转让位,切割刃54不会直接与玻璃管m接触。此时控制伸缩杆561缩短复位,复位杆563即会在弹簧的弹力作用下重新将连接臂53回顶。此时位于连接臂53另一端的切割刃54即会向玻璃管m转动,在接触切割玻璃管m的同时,会在惯性的作用下将玻璃管m的切割处崩断,保证切割处的稳定分离,避免出现切割不到位的情况,进一步提高了制备精度。
54.可选地,切割刃54与连接臂53可拆卸连接。示例性地,在本发明实施例中,在长时间使用后,切割刃54可以由连接臂53上拆下进行保养和替换,提高了自动限位操作针拉制仪的整体使用寿命。
55.可选地,切割刃54为呈圆盘状的钨钢刀片。示例性地,在本发明实施例中,钨钢是采用优质碳化钨+钴粉料经配方配比混合后通过压制烧结制成,具有高硬度、高强度、高耐磨性和高弹性模量。同时采用圆盘状的切割刃54,在一部分刀刃使用耗损后,可以通过旋转将其他未使用过的刀刃设置到切割位置进行反复使用,进一步提高了自动限位操作针拉制仪的整体使用寿命。
56.可选地,第一驱动装置24、第二驱动装置34和第三驱动装置55为伺服电机。其在接受控制指令后响应时间差小于50ms,控制精度高,能够准确控制拉制过程中的夹持力,以及
驱动行程,保证制备精度。
57.可选地,加热器42为铂铱合金环,铂铱合金换围绕加热孔41的孔壁设置。示例性地,在本发明实施例中,在进行加热后,可以通过向铂铱合金环的两端加载大电流,瞬间将铂铱合金环内,也即是加热孔41内的温度加热到800℃到900℃,加热速度快,有效保证制备精度需求。同时相比采用酒精灯或者液化气点火器等明火设备对玻璃管进行加热,不会对试验室内的环境造成污染。
58.可选地,自动显微操作针拉制仪还包括管托25,管托25安装于第一滑块22上且位于第一夹爪23上方。示例性地,在本发明实施例中,在进行玻璃管m的上料装夹之前,可以先将玻璃管m放入管托25上的安装孔中穿过,管托25的安装孔正对第一夹爪23和第二夹爪33,利用管托25的限位导向可以使玻璃管m准确滑动到第一夹爪23和第二夹爪33的夹持位置,有利于夹持紧固到位,确保拉制时始终保持同轴不会发生弯折,进一步提高了制备精度。
59.可选地,自动显微操作针拉制仪还包括外箱体7,立式支架1,第一夹持组件2、第二夹持组件3、加热装置4和断针装置5均安装于外箱体7内部,外箱体7上具有可开合的透明视窗71。示例性地,在本发明实施例中,在进行限位操作针的拉制过程中,在完成上料装夹后即可关闭透明视窗71在外部观察拉制流程,在完成后再打开进行上下料。进一步保证加热和拉制玻璃管m的过程中不受外界环境和温度的影响,进一步提高了制备精度。
60.图11是本发明实施例提供的拉制方法的流程图。如图11所示,本发明实施例还提供了一种拉制方法,基于图1至图10所述的自动显微操作针拉制仪实现,该拉制方法包括一下步骤:
61.s1,对需要拉制的玻璃管m进行上料,利用第一夹爪23夹紧玻璃管m的中部,利用第一驱动装置24驱动第一滑块22在第一滑轨21上滑动,使玻璃管m穿过加热孔41,利用第二夹爪33夹紧玻璃管m的下端。
62.具体地,在需要制备显微操作针时,试验人员可以拿取需要拉制的玻璃管m进行上料。将玻璃管m对准加热装置4上的加热孔41后,首先利用第一夹爪23夹紧玻璃管m的中部,之后利用第一驱动装置24驱动第一滑块22在第一滑轨21上下降,带动玻璃管m穿过加热孔41,直到玻璃管m的下端滑动到第二夹爪33的位置停止,之后利用第二夹爪33夹紧玻璃管m的底部,完成玻璃管m的装夹。
63.s2,启动加热器42,利用加热装置4对玻璃管m进行加热,达到设定加热时间后停止加热。
64.s3,利用第二驱动装置34驱动第二滑块32在第二滑轨31上滑动,对玻璃管m进行拉制。
65.具体地,利用第二驱动装置34驱动第二滑块32在第二滑轨31上下降至设定位置,将加热后的玻璃管m拉长到指定的长度。
66.s4,利用断针装置5切割玻璃管,使玻璃管m断开。
67.s5,利用第一驱动装置24驱动第一滑块22回到初始位置,并松开第一夹爪23,完成显微操作针的拉制。
68.具体地,利用第一驱动装置24驱动第一滑块22上升并回到初始位置,松开第一夹爪23后试验人员即可将第一夹爪23夹持的拉长并切割后的玻璃管m取下,完成显微操作针的制备。
69.采用本发明实施例所提供的自动限位操作针拉制仪和拉制方法对显微操作针进行制备,其通过间距可调整的第一夹爪23和第二夹爪33在竖直方向上对玻璃管m进行夹持,并在配套的第一驱动装置24和第二驱动装置34驱动下进行指定距离的拉制,避免了人工操作造成尺寸偏差导致无法准确控制拉伸长度和玻璃管的管径的问题。同时在拉伸前的加热过程中,对于玻璃管m的待拉制段落,在其径向上采用加热孔41进行360
°
的包围式加热,使待拉制段落受热均匀,减少外界环境对加热过程的干扰。实现在试验室内对显微操作针进行流程化的自动拉制,提高制备精度,降低报废率。
70.除非另作定义,此处使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本发明专利申请说明书以及权利要求书中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不表示数量限制,而是表示存在至少一个。“包括”或者“包含”等类似的词语意指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的元件或者物件极其等同,并不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则所述相对位置关系也可能相应地改变。
71.以上所述仅为本发明的可选实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。