一种釉水自动配制生产系统结构的制作方法
1.本发明涉及釉水自动配制生产系统。
背景技术:
2.在一些瓷器产品的生产中,前期的釉水配制是一道较为繁琐、复杂、耗时的配制过程。目前,生产企业中的釉水配制主要是由人工来完成,人工进行存在着较多的问题,如配制釉水的各种原料通常是分别单独盒装存放在仓库内,配制时需人工数次往返一一拿取各种原料,用完后还要放回原位,人工消耗了较多体力,影响工作精力,间接的会出现影响釉水原料配制的情况发生,人工查找原料比较慢,且存在取料出错、放料没有放在原位的可能,这也会导致出现配制出错的情况发生;再如釉水配好原料需进行球磨,球磨后获得釉水需试验使用看效果,配制生产出来的釉水需进行包装等,这些在生产企业中都没有一些自动化进行的设备,更没有整合在一条系统生产线上,无法进行规范的管理。因此,也存在着较多生产管理上的问题。
技术实现要素:
3.本发明的目的在于提供一种布局结构紧凑合理,多工序整合型且能够机械自动化进行配制生产工作的一种釉水自动配制生产系统。
4.为实现上述目的,本发明的技术方案是:一种釉水自动配制生产系统结构,包括用于存放配制用的原料的库存区、其工作端上设有复合手抓部件的多轴机械臂以及围绕在多轴机械臂周围布设并且在多轴机械臂的复合手抓部件活动能及的范围布设的配制区、球磨工作区和清洗排料区。
5.还包括有围绕在多轴机械臂周围布设并且在多轴机械臂的复合手抓部件活动能及的范围布设的还包括有烧制区和自动包装区,和/或围绕在多轴机械臂周围布设的人工操作区。
6.所述库存区内整齐布设有一排或多排用于放置盒类物料的立体库架以及进行抓取或放置盒类物料的机械取放料装置,立体库架的一侧为供取放料工作的巷道,所述机械取放料装置活动在巷道内并且巷道的一端为盒类物料的进出料端对应配制区;所述配制区设有配制平台,所述配制平台包括对应进出料端进行用料和回放接应的传输装置以及能够放置球磨罐并且实现将传输装置传输过来的盒类物料进行定量取料在球磨罐内和取料后放回传输装置的配制装置;所述球磨工作区布设有一台或多台球磨机;所述清洗排料区设有用于清洗分类研磨球和排出釉水的清洗分类装置。
7.所述烧制区包括有用于搅拌釉水的搅拌装置、用于输送桶装釉水的桶装釉水输送线、用于放置陶瓷胚料的胚料放置台、用于陶瓷胚料烧制的窑炉以及胚料抓取机械臂,所述桶装釉水输送线的一端朝向多轴机械臂为多轴机械臂活动能及的一端并且所述搅拌装置对应该端设置,所述胚料抓取机械臂工作在桶装釉水输送线、胚料放置台与窑炉之间用于抓取陶瓷胚料蘸取釉水放置在窑炉内烧制和烧制后抓取出;所述自动包装区设有釉水分包
装设备。
8.所述烧制区还包括有设置在胚料抓取机械臂工作活动能及的位置上用于给陶瓷胚料表面进行打标的打标装置,所述窑炉多个并排布设,所述胚料抓取机械臂包括沿窑炉布设方向一侧延伸设置在地面上的移动轨道和移动在移动轨道上的抓取机械臂,所述桶装釉水输送线与窑炉相对设置在移动轨道的另一侧,所述胚料放置台设置在桶装釉水输送线与移动轨道之间。
9.所述库存区和烧制区以巷道进出料端和桶装釉水输送线供多轴机械臂活动能及的一端为相同朝向并排设置,以多轴机械臂朝向烧制区的一侧为工作前侧,所述球磨工作区内有多台球磨机并排布设在烧制区与多轴机械臂的前侧之间,所述清洗排料区设置在多轴机械臂的右侧,所述自动包装区设置在多轴机械臂的后侧,所述人工操作区设置在多轴机械臂的左侧,球磨工作区、清洗排料区、自动包装区和人工操作区四者将多轴机械臂围合在内,所述配制区设置在球磨工作区与人工操作区的拐角处,配制区内的配制装置与球磨工作区并排同行并且与人工操作区并行同列,配制区的传输装置设置在配制装置与库存区之间。
10.通过采用上述技术方案,本发明的有益效果是:上述一种釉水自动配制生产系统结构整合了库存取放—原料传输—取料(包含原料和研磨球)入罐制备—转至球磨进行—球磨后的清洗分类和排出釉水、研磨球—釉水试用烧制—成品釉水分袋包装等等工序整合在同一个可视范围空间内,相比现有生产企业内的杂乱无章的分布,本发明的布局结构紧凑合理,能够缩减占用空间,且在该空间内可达到一台较大的多轴机械臂即能够进行多道工序的应用操作,可减少大型设备的成本投入,各道工序中均为机械自动化设备,可代替人工操作,可提高准确性,减少人工操作带来的问题情况,通过进行管理程序的设计可达到系统规范的管理进行,工作过程中可无需人工记录,而是由控制系统统一管理,能够随时获取系统工作数据,从而达到本发明的上述目的。
11.综上,本发明的一种釉水自动配置生产系统结构具有利于系统管理、自动化进行、布局结构紧凑、缩小占用空间、可视范围内工作、便于人工管理等等优异之处,解决了现在生产企业中人工操作进行存在的诸多问题。
附图说明
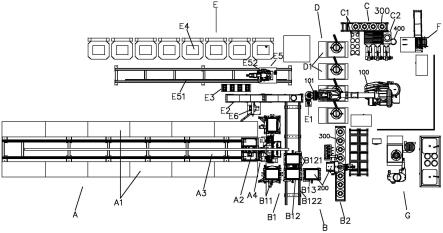
12.图1是本发明涉及的一种釉水自动配置生产系统的布局结构示意图;
13.图2是本发明涉及的机械取放料装置的结构示意图;
14.图3和图4是本发明涉及的取放料机构的不同角度结构示意图;
15.图5是本发明涉及的配制装置的结构示意图;
16.图6是本发明涉及的螺旋绞龙的结构示意图;
17.图7是本发明涉及的对接驱动机构的结构示意图;
18.图8和图9是本发明涉及的绞龙放置清洗箱的不同角度结构示意图;
19.图10是本发明涉及的清洗分类装置的结构示意图;
20.图11是本发明涉及的研磨球筛板的结构示意图;
21.图12是本发明涉及的的复合手抓部件的结构示意图;
22.图13是本发明涉及的一种釉水自动配置生产系统(去掉立体库架)的立体角度结
构示意图。
23.图中:
24.多轴机械臂100;复合手抓部件101;盒类物料200;球磨罐300;釉水桶400;
25.库存区a;立体库架a1;机械取放料装置a2;巷道a3进出料端a4
26.平移底板a1;升降立柱a2;平移机构a3;
27.地面轨道a31;上端轨道a32;驱动平移结构a33;滑轮组件a34;
28.升降移动机构a4;驱动升降结构a41;升降安装板a42;
29.取放料机构a5;载物平台a51;底板a511;载物架a512;
30.横移带动机构a513;顶升气缸a5131;顶升安装板a5132;
31.水平移动机构a5133;带动块a5134;
32.抱紧装置a514;支架a5141;横板a5142;
33.抱紧夹杆a5143;开合气缸a5144;铰接架a5145;
34.推拉机构a52;导向滑动结构部件a521;升降架a522;
35.升降气缸a523;伸缩气缸a524;推拉部件a525;
36.配制区b;传输装置b1;可转向输送装置b11;
37.多输送带输送装置b12;输送带b121;往复横移机构b122;对接输送装置b13;
38.配制装置b2;翻转台b1;绞龙对接驱动机构b2;安装架b21;驱动电机b22;
39.对接传动头b23;伸缩对接部b231;连接传动部b232;
40.伸缩带动机构b24;连接板b241;伸缩驱动缸b242;出料定位板b25;
41.螺旋绞龙b3;外套管b31;端盖b311;限位结构b312;
42.螺旋绞龙杆b32;出料管b33;
43.绞龙放置清洗箱b4;主箱体b41;隔板b411;独立清洗格b412;
44.插入孔b413;定位结构b414;排水口b415;
45.清洗管件b42;出料管清洗管b421;格内清洗管b422;
46.机械手抓b5;手指气缸夹b51;活动机构b52;
47.称重装置b6;称重盘61;顶升机构b62;
48.球磨罐输送装置b7;底座框架b71;输送板b72;
49.球磨工作区d;球磨机d1;清洗排料区c;放置台c1;清洗分类下料装置c2;
50.排料分类池c1;排料槽c11;排出口c12;
51.倒扣架c2;通孔c21;定位结构c22;
52.清洗管件c3;清洗头c31;研磨球筛板c4;落料槽c41;
53.研磨球储料斗c5;料斗本体c51;进料口c511;出料口c512;
54.排料机构c52;接料斗c53;倒料机构c54;
55.烧制区e;搅拌装置e1;桶装釉水输送线e2;胚料放置台e3;
56.窑炉e4;胚料抓取机械臂e5;移动轨道e51;抓取机械臂e52;打标装置e6;
57.自动包装区f;人工操作区g。
具体实施方式
58.为了进一步解释本发明的技术方案,下面通过具体实施例来对本发明进行详细阐
述。
59.本实施例公开的一种釉水自动配制生产系统,如图1-图13所示,包括库存区a、配制区b、球磨工作区d、清洗排料区c、烧制区e、自动包装区f、人工操作区g、多轴机械臂100和控制系统(图中不可见,所述控制系统用于控制整个系统的工作运行,因此主要是根据釉水制备生产过程进行的各区域各设备的机械控制,主要是电控和控制程序的部分)。
60.所述库存区a用于存放配制釉水用的原料;
61.所述配制区b用于釉水原料的取料进罐配比;
62.所述球磨工作区d用于原料的球磨配制工作进行;
63.所述清洗排料区c用于球磨罐内和研磨球清洗及研磨球和釉水的分类排出;
64.所述烧制区e用于配制出来的釉水进行陶瓷胚料的使用烧制;
65.所述自动包装区f用于成品釉水的分包装进行;
66.所述人工操作区g用于一些需要人工进行以及整个系统监控操作进行;
67.所述多轴机械臂100用于实现代替人工的拿取、放置、搬运等的动作进行;
68.其中,所述烧制区e、自动包装区f、人工操作区g可根据系统需要进行设置,如本系统中的烧制区e主要是进行一些少数试验、定制等产品的烧制,不适合于大批量的生产,本系统的人工操作区g不仅能作为系统的监控操作区域,该区域还另设置了独立的球磨机、清洗分离操作的装置等,还有自动包装区f,如无需在此系统中就进行包装,可不用设置。
69.所述多轴机械臂100是一种现有技术的智能机械臂,其工作精度高、动作灵活性高且动作可靠稳定,其工作端上设有复合手抓部件101,本实施例中该复合手抓部件101为能够实现稳定抓取现有结构的球磨罐、球磨罐的盖子、盛放釉水的桶的结构设置,具有上下两组抱夹臂,每组抱夹臂上具有弧形的抱紧条,同一组抱夹臂的两抱紧条弧形内凹的一侧相对设置,这样现有的球磨罐和釉水桶都能够达到抱夹使用,抱夹臂也可用于其他动作的使用,如抬起、下压等的动作使用。根据不同生产企业厂房结构或现有室内结构本发明的系统可适应性的布局应用,需要注意的是,布设时首先以工作进行由多轴机械臂100进行的,围绕在多轴机械臂100周围布设并且在多轴机械臂100的复合手抓部件101活动能及的范围布设,其他在周围延伸开,如本实施例后面详细公开的一种布局结构,详见下面的描述内容,下面继续描述一下各区域内的装置结构设置以及详细的结构位置连接关系。
70.所述配制区b、球磨工作区d、清洗排料区c和控制系统,特别是前三者是配制的主要工作进行区域,这些围绕在多轴机械臂100周围布设并且在多轴机械臂100的复合手抓部件101活动能及的范围内布设;所述库存区a内整齐布设有一排或多排用于放置盒类物料200的立体库架a1以及进行抓取或放置盒类物料200的机械取放料装置a2,所述立体库架a1的一侧为供取放料工作的巷道 a3,所述机械取放料装置a2活动在巷道a3内并且巷道的一端为盒类物料200 的进出料端a4对应配制区b,如图2所述的为两排,两排之间间隔开为机械取放料装置a2取放料的巷道a3。
71.本实施例的机械取放料装置a2,如图2、图3、图4和图5所示,主要有以下几个主要部分构成,平移底板a1、升降立柱a2、平移机构a3、升降移动机构 a4和取放料机构a5。所述平移底板a1为一平板,所述升降立柱a2的下端连接在平移底板上并垂直立设,为达到升降立柱a2的垂直稳定,所述升降立柱a2 与平移底板a1之间可设有用于稳定升降立柱垂直的垂直支撑结构,如图中所示的是通过支架连接构成的三角形稳定结构等来实现垂直稳定支
撑。
72.本实施例中,所述平移机构a3以能够实现工作使用中保持平移和升降的稳定性来进行设置,如果是一些立体库架a1是较低的、盒类物料200较轻的,该平移机构a3可采用一些移动小车来实现智能的移动,而对于立体库架较高且盒类物料可较重的,那机械结构和工作的稳定性就需要慎重,本实施例如图中所示采用的是所述平移机构a3设置在平移底板a1和升降立柱a2上端由其带动平移,具体是,所述平移机构a3包括地面轨道a31、与地面轨道a31平行的上端轨道a32、设置在底面轨道a31与平移底板a1之间的驱动平移结构a33以及设置在升降立柱a2上端并滑动在上端轨道a32上的滑轮组件a34,所述上端轨道 a32与立体库架a1连接架设,驱动平移结构a33可采用现有的轨道驱动技术,如图中所示的是电机、齿轮和传动齿条配合的一种方式,该方式为现有常见技术,这里就不再详细描述,不影响本领域技术人员对本案技术方案的清楚理解,还有本实施例公开的平移机构a3是在升降立柱a2的上端和下端均有轨道导向滑道限定,能够对升降立柱a2的上下端有较为稳定的支撑,因为在平移和承重升降时都能够达到较好的稳定较好。所述升降移动机构a4是设置在升降立柱a2 上的,而取放料机构a4是对应在升降立柱a2的一侧面设置在升降移动机构a4 上由其带动升降,所述升降移动机构a4包括有通过驱动升降结构a41带动实现升降移动的升降安装板a42,所述取放料机构a4安装设置在升降安装板a42上,这里驱动升降结构a41如上述驱动平移结构a33可采用现有的升降驱动技术,如电机、滚珠丝杠副等的结构配合的方式,该方式为现有常见技术,升降动作稳定顺畅可靠,这里就不再详细描述,不影响本领域技术人员对本案技术方案的清楚理解。
73.所述取放料机构a5是本实施的机械取放料装置的主要部分,特别是针对用于盒类物料200的取放应用进行的结构设置,如图所示的,包括上下间隔开设置在升降移动机构a4的升降安装板a42上的供盒类物料200放置的载物平台a51 和用于将盒类物料200拉入或推出载物平台a51的推拉机构a52,载物平台a51 可在是使用工作时接驳立体库架a1,确保盒类物料200推拉的承载接触,不会掉落,推拉机构a52进行从盒类物料架200上拉出或推入的立体库架a1的稳定操作。具体的,所述载物平台a51包括固定连接在升降安装板a42上的底板a511、设置在底板a511上的供盒类物料200放置的载物架a512以及设置在底板a511 上横移带动机构a513。如图中所示的,所述载物架a512为一中间裸空的方形框架,框架底部固定连接在底板a511上,框架的上表面则供盒类物料搭放,所述横移带动机构a513对应框架裸空部分内设置,其能够实现相对载物架a512实现升降与盒类物料接触或分离并且能够在接触时带动盒类物料移动放置在载物架a512上或移动出载物架a512,具体包括固定安装在载物架a512或底板a511 (图中为底板a511上)上的顶升气缸a5131、连接在顶升气缸a5131的活塞杆上由其带动顶升动作的顶升安装板a5132、固定设置在顶升安装板a5132上的水平移动机构a5133和固定设置在水平移动机构a5133上由其带动水平移动的带动块a5134,所述带动块a5134用于与盒类物料定位接触带动,如此在使用时,初始横移带动机构a513是下降的带动块a5134的上表面低于载物架a512框架的上表面,待推拉机构a52将盒类物料拉入搭放在载物架a512框架一端的上表面后,顶升气缸a5131动作推动顶升安装板a5132上升,此时带动块a5134能够与盒类物料上底部的结构部位能够对应接触,如图中所述带动块a5134上有一条嵌入槽可供盒类物料底部上的一带动板嵌入,接着再通过水平移动机构 a5133(这里水平移动机构a5133如上述驱动升降结构a41可采用现有的升降驱动技术,如电机、滚
珠丝杠副等的结构配合的方式,该方式为现有常见技术,升降动作稳定顺畅可靠,这里就不再详细描述,不影响本领域技术人员对本案技术方案的清楚理解)动作,带动带动块a5133在载物架a512框架内向另一端移动,同时拉动盒类物料移动到载物架a512的中间位置,从而将盒类物料在载物架a512稳定放置,此时横移带动机构a513保持顶升状态可达到定位盒类物料的作用,而在需要将盒类物料移动出载物架a512时,顶升气缸a5131动作下降使带动块a5133脱离盒类物料,水平移动机构a5133动作带动带动块a5133 回到原来位置与盒类物料底部上的另一带动板对应,然后顶升嵌入接触达到可带动,接着带动块水平移动机构a5133动作带动带动块a5133在载物架a512框架内向另一端移动,这样即能够将盒类物料移动出载物架a512。
74.本实施例中如需进一步防止盒类物料在本发明装置平移过程中出现滑动可在增加设置有用于防止放置在载物平台51上的盒类物料滑动的抱紧装置a514,如图中所示,所述抱紧装置a514包括对应载物平台a51的侧边安装设置的支架 a5141、设置在支架a5141上部的横板a5142、横板a5142的两端上分别铰接设置的抱紧夹杆a5143、连接两抱紧夹杆a5143同朝向一端的开合气缸a5144和供开合气缸a5144可活动架设在横板a5142上的铰接架a5145,两抱紧夹杆a5143 的同朝向另一端朝向横移带动机构a513方向延伸,通过该结构设置盒类物料置于载物架a512的中间位置后开合气缸a5144伸出动作,两抱紧夹杆a5143活动对应盒类物料的两相对侧壁抱紧,从而实现有效可靠的作用效果,而盒类物料要移动时,开合气缸a5144缩回动作,两抱紧夹杆a5143相对张开,松开抱紧,且张开后产生角度偏移,两抱紧夹杆a5143不会阻挡到盒类物料的移动。另外,本实施例的所述推拉机构a52包括通过导向滑动结构部件a521连接在升降安装板a42上的升降架a522、设置在升降安装板a42上并其活塞杆与升降架a522连接的升降气缸a523、设置在升降架a522上的伸缩气缸a524以及设置在伸缩气缸a524的活塞杆上的推拉部件a525,所述推拉部件a525供与盒类物料定位接触带动,图中为l型勾状的部件,如此使用工作时,在达到高度位置后,推拉部件a525的高度略高于盒类物料的上表面高度,然后伸缩气缸a524伸出动作,使得推拉部件a525的l型勾状部分处于盒类物料的上表面边沿上方,接着升降气缸a523动作带动升降架a522下降,此时推拉部件a525的l型勾状部分勾住盒类物料的上表面边沿,接着伸缩气缸a524缩回动作将盒类物料拉出在载物架 a513上,此时升降气缸a523动作带动升降架a522略微上升使得推拉部件a525 的l型勾状部分脱离盒类物料的上表面边沿,最后再由上述的横移带动机构a513 的动作调整盒类物料的稳定放置,而推拉机构a52的推送盒类物料至盒类物料上的工作方式通过上述动作方式反向推导能够清楚,这里就不再描述。上述所述升降架a522上的伸缩气缸a524和推拉部件a525,为适应与两侧均有立体库架的取放盒类物料使用所述升降架a522上的伸缩气缸a524和推拉部件a525的设置在升降上可对应载物平台a51的进出料方向的两端设置,从而可实现左右两侧的取放料工作。
75.所述配制区b设有配制平台,所述配制平台包括对应进出料端a4进行用料和回放接应的传输装置b1以及能够放置球磨罐300并且实现将传输装置b1传输过来的盒类物料200进行定量取料在球磨罐300内和取料后放回传输装置b1 的配制装置b2。本实施中,所述传输装置b1如所示包括对应在进出料端a4的一侧或相对两侧并且可与载物平台51接驳的可转向输送装置b11、对应接驳可转向输送装置b11的多输送带输送装置b12以及接驳多输送带输送装置b12和配制装置b2的对接输送装置b13,这里可转向输送装置b11是可达到转
向的传输,如图中所示的在进出料端a4的相对两侧设置能够提供进出料传输的避让,有利于提供取放料输送的效率,如设置为较为简易的布局,那主要起避让作用的一侧可无需达到能够转向的功能作用;所述多输送带输送装置b13具有并排设置的多个输送带b121(多个输送带b121之间为分离并排的设置)并且具有能够带动多个输送带b121往复横移的往复横移机构b122,通过往复横移机构b122 带动多输送带输送装置b13的其一输送带b121接驳在可转向输送装置b12与对接输送装置b14之间,从而实现从进出料端a4至配制装置b2之间的来回传输,多输送带输送装置b13的多个输送带b121的设置提供进出料传输的避让,有利于提供取放料输送的效率,也是提高配制过程的工作效率。
76.所述配制装置b2如图7-11所示,包括翻转台b1、绞龙对接驱动机构b2、螺旋绞龙b3、绞龙放置清洗箱b4、机械手抓b5、称重装置b6和球磨罐输送装置b7,应用于釉水配制使用时放置操作区,该球磨罐输送装置b7用于实现自动化的输送原料球磨罐,如无需该自动输送需要可去除该装置,本实施例为有球磨罐输送装置b7的设置,下面结合附图详细描述本各部分的结构位置连接关系以及使用工作过程。
77.所述球磨罐输送装置b7包括底座框架b71、通过滑动驱动结构设置在底座框架b71上移动的输送板b72,所述输送板b72上间隔设有多个球磨罐定位放置通孔(图中不可见)供放置球磨罐300,通过输送板b72的移动来对应至下料位置以盛装原料,还有所述球磨罐输送装置b7的一端为多轴机械臂100的复合手抓部件101能够活动能及抓取其上球磨罐300至球磨工作区d的球磨机内的手抓能及工作端,如图中朝向球磨工作区d一端,这样通过输送板b72的移动可将配好原料的球磨罐300移动至该端给复合手抓部件101抓取进入下一工序。本实施例中定量取料是通过称重的方式定量的,即设置用于取料称重所述称重装置b6,本实施例中其设置在底座框架b71上,其包括有可对应在各定位放置通孔下方的称重盘61以及用于顶升称重盘的顶升机构b62,顶升机构b62可采用气缸顶升的方式,在顶升时称重盘61与穿过球磨罐定位放置通孔的球磨罐底部接触并上推使得称重盘61完全承载住球磨罐重量进行重量感应,因此称重装置b6的设置为对应下料的位置。
78.所述翻转台b1用于放置盛装有原料的盒装物料200,其结构为可实现往复翻转定位的结构设置,还可具有达到定位盒装物料200和推动盒装物料200的结构设置,图中所示,翻转台b1对应称重装置b6铰接在输送框架71上,翻转为水平时可与对接输送装置b13接驳进行盒装物料200进出或进行拔插螺旋绞龙b3。
79.所述绞龙对接驱动机构b2用于连接插入在翻转台b1的盒装物料200内的螺旋绞龙b3和驱动螺旋绞龙b3转动实现取料,其结构包括对应称重装置b6并且与翻转台b1相对方向连接在输送框架71上的安装架b21、设置在安装架b21 上的驱动电机b22、连接在驱动电机b22输出轴上的可伸缩活动的对接传动头 b23以及带动对接传动头b23实现伸缩动作的伸缩带动机构b24,这里所述对接传动头b23包括一端具有对接结构与螺旋绞龙b3上端对接的伸缩对接部b231 以及一端连接驱动电机b22输出轴并另一端连接伸缩对接部b231的连接传动部 b232,可采用市场上现有部件,所述伸缩带动机构b24包括供与伸缩对接部b231 固定连接的连接板b241和设置在安装架b21上并且其活塞杆连接在连接板b241 上的伸缩驱动缸b242,工作使用时,翻转台b1将插上了螺旋绞龙b3的盒装物料200翻转为取料状态,此时螺旋绞龙b3的上端不接触在伸缩对接部b231,通过伸缩驱动缸b242推动连接板b241带动伸缩对接部b231向前伸出对螺旋绞龙 b3的上端插接,接着就可通过驱动电机b22的工作带
动螺旋绞龙b3转动实现出料,而拆卸螺旋绞龙b3时反之动作。本实施例中如图所示的,所述安装架b21 上进一步的设有出料定位板b25,所述出料定位板b25端部上开设有供下述的螺旋绞龙b3上的出料管嵌33入从而定位住出料的u型口251,图中出料定位板b25为可伸缩的方式设置,在翻转台翻转后伸出定位住出料管,取料后缩回,从而能够确保出料位置以及避免影响其他动作进行。
80.所述螺旋绞龙b3用于插入在放置在翻转台b1上的盒装物料200内进行取料,其结构如图所示,包括外套管b31、螺旋绞龙杆b32和出料管b33,所述外套管b31的上端设有端盖b311,其下端为开放口供原料的螺旋上升进入,所述螺旋绞龙杆b32上端穿入在外套管b31内并可转动穿设在端盖b311上,其下部裸露在外套管b31的下端外,所述出料管b33的一端连接在外套管b31的外壁上并连通至外套管内形成螺旋出料的通道,所述外套管b31的下部外侧壁上设有用于使用放置的限位结构b312,结构简单,可方便内部清洗。
81.所述绞龙放置清洗箱b4用于更换放置螺旋绞龙b3和清洗螺旋绞龙b3,其结构如图所示,包括主箱体b41和清洗管件b42;所述主箱体b41内通过间隔布设隔板b411分隔为多个独立清洗格b412,并且主箱体b41的上部对应各独立清洗格b412设有供螺旋绞龙b3插入独立清洗格b412内的插入孔b413以及供定位架设出料管b33的定位结构b414,图中定位结构b414为供出料管b33嵌入的凹槽,所述主箱体b41的底部设有清洗的排水口b415;所述清洗管件b42对应各个独立清洗格b412设置,其包括对应出料管b33的外端口从而对出料管b33 内部清洗的出料管清洗管b421以及穿入在独立清洗格b412内对螺旋绞龙杆b32 清洗的格内清洗管b422,通过该结构的绞龙放置清洗箱b4能够同时放置多根螺旋绞龙b3供下一次取料的使用和使用后的清洗,清洗能够清洗到外套管b31、出料管b33的内部,且图中格内清洗管b422是对应螺旋绞龙杆b32的长度方向布设,因此能够达到较好的清洗效果。另外,所述机械手抓b5用于抓取绞龙放置清洗箱b4上的螺旋绞龙b3插入翻转台b1盒装物料200内或者抓取翻转台b1 盒装物料200内的螺旋绞龙b3插入绞龙放置清洗箱b4内,其可采用现有技术产品,如图中所示的所述机械手抓b5位包括手指气缸夹b51和带动手指气缸夹 b51实现多维方向移动的活动机构b52,通过机械手抓b5的移动或者机械手抓 b5与绞龙放置清洗箱b4的相对配合移动来抓取对应位置。
82.所述球磨工作区d布设有一台或多台球磨机c1,设置的台数可根据多轴机械臂100的活动能及范围设置或根据以往的釉水制备生产经验需要的台数来配置。
83.所述清洗排料区c设有用于清洗分类研磨球和排出釉水的清洗分类装置。如图中所示,所述清洗分类装置包括复合手抓部件101活动能及的放置台c1和清洗分类下料装置c2,所述放置台c1主要供球磨罐300和球磨罐300的罐盖放置,清洗分类下料装置c2包括排料分类池c1、倒扣架c2、清洗管件c3、排釉水过滤组件(图中不可见)、研磨球筛板c4和研磨球储料斗c5,下面结合附图详细描述各部分的结构位置连接关系以及使用的工作过程。
84.所述排料分类池c1,如图12和图13中所示,为一长方形的分类池,其内底部分隔为多个排料槽c11,排料槽c11为利于下落滑料的结构设置,具有下落的排出口c12,多个排料槽c11为并排为一排的设置。所述研磨球筛板c4设置在排料分类池内并对应在所有排料槽c11上方,其结构为可实现自动将研磨球分类筛滤到各对应的排料槽c11内的结构设置,如图中所示的,所述研磨球筛板c4为从一侧的排料槽c11向另一侧的排料槽c11倾斜设置,这样能够使得落在研磨球筛板c4上的研磨球能够从有一个从高处向低处方向滚动的作用,所
述研磨球筛板c4的结构还有为其上均布间隔设有多条落料槽c41,整齐排布满,各条落料槽c41为对应研磨球筛板c4倾斜方向延伸,即高低方向延伸,并且各条落料槽c41的槽宽为从研磨球筛板c4倾斜设置高的一端到低的一端对应下方的排料槽c11依次扩大宽度,如图所示,各条落料槽c41对应下方排料槽分为多段,各段宽度不同可供不同直径的研磨球落入,这样不同直径的研磨球均从高处开始下落,在向低处滚动的时候会接触落料槽c41,直径大研磨球会持续被落料槽c41阻隔着滚动,而直径较小的则对穿过落料槽c41下落到对应的排料槽c11内,从而达到上述的结构作用效果。
85.所述倒扣架c2用于倒扣球磨罐倒出釉水和研磨球,如此如图,所述倒扣架 c2应对应架设在在研磨球筛板c4倾斜设置的高的一端上方,所述倒扣架c2上开设有通孔c21,并且在通孔c21的周围设有供定位球磨罐的定位结构c22,便于倒扣定位放置,确保管内的釉水和研磨球能够排出。所述排釉水过滤组件设置在倒扣架c2与研磨球筛板c4之间用于倒扣球磨罐时分离釉水和研磨球并排出釉水,该组件具有盛接釉水的接料管路结构延伸至排料分类池c1外,其可为自动控制的机械结构,这里不具体限定,排料分类池c1外且在复合机械手抓101 活动能及的范围内放置有釉水桶400供盛装排出的釉水;所述清洗管件c3对应倒扣架c2设置,其具有可伸入到球磨罐300内进行清洗工作的清洗头c31,如图中所示的为用于蒸汽清洗用的结构设置,清洗管件c3的从通孔c21下方向上延伸穿过通孔c21,清洗头c31对应在通孔c21中心处上方,在球磨罐倒扣时即能够穿入罐内,清洗效果更好。
86.所述研磨球出料斗5对应各排料槽c11设置分别盛接从各排料槽c11排出的研磨球,如图中所述,分别设置存放各种不同直径的研磨球,所述研磨球储料斗c5包括料斗本体c51、排料机构c52、接料斗c53、重量传感器(图中不可见)和倒料机构c54,所述料斗本体c51的上部具有进料口c511对应在排料槽 c11的排出口c12下方,所述料斗本本体51的下部具有出料口c512,所述排料机构c52对应出料口c512设置用于打开和关闭出料口c512,图中为一由气缸带动滑动的挡板,所述倒料机构c54为能够实现往复翻转动作的结构设置,如图上的为电机的输出轴上连接为翻转架,翻转架上设有翻转角度限定的限定结构,所述接料斗c53设置在倒料机构c54上的翻转架上并且对应出料口c512用于盛接从出料口c512排出的研磨球,通过倒料机构c54的翻转动作可将盛接在其内的研磨球倒出,所述重量传感器用于感应接料斗c53重量,这样通过本发明装置的控制设定,获取重量传感器数值,当达到所需重量时通过排料机构c52动作关闭出料口c512阻挡下料,然后控制倒料机构c54将接料斗c53内的研磨球倒出,从而能够达到定量、自动下料的作用效果。
87.所述烧制区e包括有用于搅拌釉水桶400内的釉水的搅拌装置e1、用于输送桶装釉水的桶装釉水输送线e2、用于放置陶瓷胚料的胚料放置台e3、用于陶瓷胚料烧制的窑炉e4以及胚料抓取机械臂e5,还包括有设置在胚料抓取机械臂 e5工作活动能及的位置上用于给陶瓷胚料表面进行打标的打标装置e6。所述桶装釉水输送线e2的一端朝向多轴机械臂100为多轴机械臂100活动能及的一端并且所述搅拌装置e1对应该端设置,所述胚料抓取机械臂e5工作在桶装釉水输送线e2、胚料放置台e3与窑炉e4之间用于抓取陶瓷胚料蘸取釉水放置在窑炉e4内烧制和烧制后抓取出;所述窑炉e4多个并排布设,所述胚料抓取机械臂e5包括沿窑炉e4布设方向一侧延伸设置在地面上的移动轨道e51和移动在移动轨道e51上的抓取机械臂e52,所述桶装釉水输送线e2与窑炉e4相对设置在移动轨道e51的另一侧,所述胚料放置台e3设置在桶装釉水输送线e2与移动轨道之间。
88.所述自动包装区f设有釉水分包装设备,该釉水分包装设备可采用现有的分包装设备,如食品、浆料领域的一些分包装设备,这里不具体限定结构设置。
89.本实施中在设置了上述结构的机械设备结构的基础上进行了整个系统的下述结构布局,下述布局结构具有紧凑可缩小占用空间,可囊括在管理人员的可视及快速行动范围内,且各道工序能够依次顺利进行等的有益效果,所述库存区a和烧制区e以巷道a3的进出料端a4和桶装釉水输送线e2供多轴机械臂100 活动能及的一端为相同朝向并排设置,以多轴机械臂100朝向烧制区e的一侧为工作前侧,所述球磨工作区d内有多台球磨机d1并排布设在烧制区e与多轴机械臂100的前侧之间,所述清洗排料区c设置在多轴机械臂100的右侧,所述自动包装区f设置在多轴机械臂100的后侧,所述人工操作区g设置在多轴机械臂100的左侧,球磨工作区d、清洗排料区c、自动包装区f和人工操作区 g四者将多轴机械臂100围合在内,所述配制区b设置在球磨工作区d与人工操作区g的拐角处,配制区b内的配制装置b2与球磨工作区d并排同行并且与人工操作区g并行同列,配制区b的传输装置b1设置在配制装置b2与库存区a 之间。
90.上述实施例和图式并非限定本发明的产品形态和式样,任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应视为不脱离本发明的专利范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1