一种细胞显微注射装置及其鲁棒阻抗控制方法
1.本发明涉及精密控制技术领域以及生物医学工程领域,特别是涉及一种细胞显微注射装置及其鲁棒阻抗控制方法。
背景技术:
2.显微注射技术是在高倍倒置显微镜下,操纵显微操作器来控制显微注射针进行细胞或早期胚胎操作的技术,广泛应用于药物开发、体外受精、生物克隆、转基因等领域。显微注射技术的核心在于高效率、低损伤地进行细胞或早期胚胎穿刺。由于人工穿刺成功率、效率低的原因,穿刺过程开始向自动化发展。自动穿刺技术广泛采用压电驱动器驱动显微注射针完成穿刺过程。但研究表明,压电信号会引发针尖振动,导致细胞变形,其中横向振动相较于轴向振动对细胞变形产生的影响更大。过大的细胞变形会压迫并改变细胞内部细胞器的相对位置,进而对细胞产生损伤。
3.目前,在结构上,柔顺导向机构可以有效地抑制显微注射针尖的横向振动。柔顺机构主要依靠机构中柔性构件的变形来实现机构的主要运动和功能,因其高分辨率、高精度等优点广泛应用于精密传动领域。柔顺导向机构是对运动进行导向的柔顺机构,对输入位移具有导向作用,故可以有效抑制针尖的横向振动,进而减小细胞的损伤。因此,目前自动穿刺技术下细胞损伤的程度很大程度上取决于柔顺机构的结构设计。柔顺机构可分为集中式柔顺机构和分布式柔顺机构,区别在于前者柔顺段应力集中分布,后者柔顺段应力分散分布;柔顺机构根据其结构形式还可以分为空间柔顺机构、平面柔顺机构等。目前应用于微注射器的柔顺机构广泛采用平面集中型柔顺机构,具有以下问题:
4.(1)疲劳问题:疲劳问题是柔顺机构失效的一大原因,尤其对于采取高频振动策略进行穿刺的柔顺导向机构更需要考虑这一问题。集中型柔顺机构固有的应力集中问题更容易使机构产生疲劳失效。
5.(2)刚度问题:柔顺机构的横向振动大小原理上取决于横向刚度,平面机构只能通过增大厚度来增大垂直于平面方向的刚度,这会导致各方向刚度的耦合,无法使柔顺机构达到一个理想的刚度比例。
6.(3)寄生运动问题:平面机构周向不对称,无法消除输入造成的周向耦合误差,导致横向寄生运动的产生,机械效率与传动精度降低。
7.此外,在自动穿刺过程中,由于细胞膜的高弹性,穿刺过程的几何非线性以及细胞内部环境复杂的特点,导致了细胞穿刺的失败或者穿刺过程中细胞损伤较大,为了提高细胞穿刺的成功率以及穿刺后细胞的存活率,需要在更短的位移以及时间内刺破细胞,这对穿刺力和穿刺速度往往具有很高的要求,故细胞穿刺中需要进行力、位控制。现有应用于细胞穿刺的力、位控制需要在两种不同控制律之间进行切换,而这可能会导致整个系统的不稳定性,进而导致收敛时间较长,无法在高频率振动情况下进行力、位跟随控制;压电驱动器的迟滞、摩擦等扰动也对现有的力、位控制提出了很大的挑战,这些外界干扰大大增加了稳态力误差和稳态位置误差。所以,现有的力、位控制系统存在收敛时间长、不稳定以及稳
态误差较大的弊端,不能很好地应用于细胞穿刺,尤其是目前更具发展前景的高频振动穿刺。
技术实现要素:
8.发明目的:本发明的目的在于提供一种细胞显微注射装置,该细胞显微注射装置基于轮毂式柔顺机构的导向作用,能够减小了显微注射装置中针头的横向振动,减小细胞穿刺的过程中细胞的损伤。同时,本发明还提供一种鲁棒阻抗控制方法,更易于完成对细胞穿刺力、位置的控制,提高了控制系统的稳定性。
9.技术方案:一种细胞显微注射装置,包括连接杆、与连接杆连接的封装器、固定在封装器内的压电驱动器、显微注射针,还包括注入器和轮毂式柔顺机构,注入器的两端分别与封装器和轮毂式柔顺机构连接,显微注射针与轮毂式柔顺机构固连;所述的轮毂式柔顺机构上设有用以将轴向振动传递至显微注射针的簧片型柔顺单元。
10.有益效果:本发明与现有技术相比具有优点:采用分布式柔顺机构,可以增加轴向与横向的刚度比,从而减小装配误差、加工误差等各种误差引起的横向振动,根本上规避了横向振动损伤细胞,从而提高了细胞穿刺的成功率。
11.进一步的,轮毂式柔顺机构具有两个同心的空心圆柱体,两个空心圆柱体的端面通过若干簧片型柔顺单元进行连接,且若干簧片型柔顺单元沿两空心圆柱体的周向均匀分布。相比与平面型柔顺机构,减小了寄生运动。
12.进一步的,显微注射针的针尖头部弯折角度为0
°
,防止产生附加横向振动。
13.进一步的,注入器内部设有呈“l”型的孔道,孔道的一端口设于注入器的侧面,显微注射针贯穿柔顺机构并插入孔道的另一端口。通过孔道的设置实现向细胞注射液体。
14.进一步的,位于轮毂式柔顺机构外表面的固定夹头,固定夹头与连接杆的一端限位活动连接,通过调整固定夹头与连接杆的位置,对于固定在封装器的压电驱动器产生预紧力作用。
15.进一步的,孔道与显微注射针接口处安装有密封圈,防止液体泄漏。
16.本发明还提供了上述细胞显微注射装置的鲁棒阻抗控制方法的技术方案:
17.在显微注射针的底部安装有微力传感器,在压电驱动器内部集成有位移传感器,采用一个控制器同时调节所述显微注射针的穿刺力和位置;该控制器的控制系统中具有显微注射针的控制环,显微注射针的控制环为位置变量x,当显微注射针的针尖与被注射对象接触时,产生接触力f,f与理想接触力f
d
进行作差得到接触力误差e
f
,e
f
作为阻抗模型的输入,得到响应的位置误差e
p
,反馈到显微注射针的控制环,调整位置输入,使得显微注射针的位置以及显微注射针与环境的接触力满足预定的理想轨迹;其中,阻抗模型中设计滑模函数进行自适应控制补偿以减小外界扰动的影响。
18.进一步的,阻抗模型的动力学方程为:
[0019][0020]
其中,m
i
是虚拟有效质量,b
i
是虚拟有效阻尼系数,k
i
是虚拟有效刚度系数,k
f
是外力系数,e
p
是位置误差,e
f
是力误差,是对位置误差进行时间求导得到的速度误差,是对位置误差进行时间二次求导得到的加速度误差。
[0021]
进一步的,稳态位置误差和稳态接触误差的解析表达为:
[0022][0023]
其中,k
i
是虚拟有效刚度系数,k
f
是外力系数,用以调整力误差e
f
的权重,是外部环境有效刚度系数,f
d
是理想所需力,x
d
是理想所需位移,x
e
是没有相互作用力时环境的平衡位置,e
pss
是稳态位置误差,e
fss
是稳态力误差,n为根据阻抗模型变化的系数。
[0024]
进一步的,所给出的位移
‑
时间参考信号斜率k以及所给出的力
‑
时间信号的最大值f
max
满足:0.5≤k≤1,10mn≤f
max
≤40mn。
[0025]
有益效果:本发明所述的一种鲁棒阻抗控制方法,与现有技术相比:规避了控制切换时所造成的系统不稳定的问题,利用阻抗模块更易于完成对细胞穿刺力、位置的控制,提高了控制系统的稳定性并减小了细胞的损伤。
附图说明
[0026]
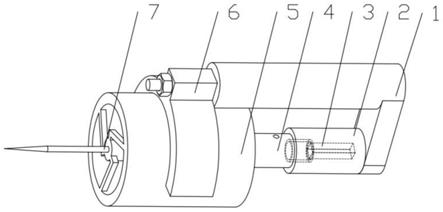
图1为本发明中显微注射装置的立体结构示意图;
[0027]
图2为本发明中连接杆的立体结构示意图;
[0028]
图3为本发明中注入器的立体结构示意图;
[0029]
图4为本发明中轮毂式柔顺机构的立体结构示意图;
[0030]
图5为本发明中细胞显微注射装置穿刺及注射过程的流程图;
[0031]
图6为本发明中鲁棒阻抗控制方法的控制框架;
[0032]
图7为本发明中理想所需力f
d
‑
时间t图以及理想所需力位移x
d
‑
时间t图。
具体实施方式
[0033]
下面结合附图对本发明的技术方案作进一步说明。
[0034]
如图1至图4所示,本发明所述的细胞显微注射装置,包括连接杆1,封装器2,压电驱动器3,注入器4,轮毂式柔顺机构5,固定夹头6,显微注射针7。
[0035]
连接杆1包括螺纹部11、连接部12、压紧部13,其中螺纹部11与固定夹头6连接,固定夹头6固定在轮毂式柔顺机构5的外侧,螺纹部11上还设有一个螺母,通过旋转螺母来调整连接杆1与固定夹头6的相对位置;压紧部13与封装器2的一端相抵,当旋紧螺母的时候,会对封装器2内的压电驱动器3产生预紧力的作用,压电驱动器3采用带柔性运放机构的压电陶瓷。
[0036]
注入器4包括螺纹部41、孔道42、配合部43。孔道42是注射物质的流入通道,呈“l”型,孔道42的弯折部分为光滑圆弧,其中一个端口位于注入器4的侧面,另一个端口与显微注射针7相连接;配合部43呈圆柱状,嵌入封装器2的一端,以传递压电驱动器3的高频振动。
[0037]
轮毂式柔顺机构5具有两个中空的同心圆柱体,分别为内中空圆柱体螺纹部53、外中空圆柱体54,其中外中空圆柱体54受固定夹头6夹紧力作用,将轮毂式柔顺机构5固连在固定夹头6上;轮毂式柔顺机构5还包括螺纹部51、簧片型柔顺单元52。螺纹部51与螺纹部41形成螺纹连接,以传递压电驱动器3的高频振动,螺纹部51与螺纹部41的连接处适当润滑,减小磨损;簧片型柔顺单元52分别与外空心圆柱体54的内端面、内空心圆柱体53外端面连
接,并沿着周向方向均匀分布,簧片型柔顺单元52总共有6片,对传递到轮毂式柔顺机构5的运动方向进行轴向导向作用;显微注射针7穿过内中空圆柱体53并与内中空圆柱体53的内侧面贴合,使得显微注射针7与轮毂式柔顺机构5固定连接,显微注射针7跟随轮毂式柔顺机构5振动。
[0038]
如图5的流程图所示,细胞穿刺开始,信号发生器产生高频正弦信号,并经带阻滤波器得到滤波后的信号,封装器2内固定的压电驱动器3接收到该信号后开始产生高频振动,由于受与固定夹头6螺纹连接的连接杆1的预紧力作用,将振动传递到与封装器2连接的注入器4中,注入器4将振动又传递到通过螺纹连接的轮毂式柔顺机构5,通过簧片型柔顺单元52的导向作用将轴向振动运动传递到显微注射针7中,使显微注射针7针尖产生高频轴向振动而刺入细胞完成细胞穿刺过程。在细胞注射过程中,待注射液体通过外部注射装置将待注射液体注入注入器4的孔道处,液体经孔道42传递到与之相通的显微注射针7内部中空腔体,待注射液体再经由显微注射针7内部腔体进入已完成细胞穿刺的细胞内,完成细胞注射过程。
[0039]
如图6所示,本发明中鲁棒阻抗控制方法是采用一个控制器同时调节所述显微注射针7的穿刺力和位置;在显微注射针7底部安装有微力传感器,在压电驱动器内部集成有位移传感器,以得到理想所需位移x
d
和理想所需穿刺力f
d
;该控制器的控制框架具有两个闭环控制,其中内环为位置反馈环,通过反馈控制器对显微注射针位置x进行闭环控制,显微注射针位置x为位置变量;当注射针的针尖与被注射对象接触时,产生接触力f,通过力传感器获得显微注射针与细胞的接触力f,与理想需求力f
d
做差后通过阻抗模型后获得δx,将δx作为输入信号反馈到位置反馈环,通过调整位置输入,使得注射针的位置以及注射针与环境的接触力满足预定的理想轨迹。
[0040]
其中,接触力f与理想需求力f做差通过阻抗模型获得δx是利用模型阻抗的动力方程,即(其中,m
i
是虚拟有效质量,b
i
是虚拟有效阻尼系数,k
i
是虚拟有效刚度系数,k
f
是外力系数,e
p
是位置误差,e
f
是力误差,是对位置误差进行时间求导得到的速度误差,是对位置误差进行时间二次求导得到的加速度误差),将穿刺过程中的力误差e
f
转化为位置误差e
p
,从而达到了显微注射针高鲁棒性的穿刺力与位置的控制。
[0041]
具体的,细胞穿刺的实际过程中,位置误差e
p
和力误差e
f
是相对变动的值,故一般利用稳定状态下的e
pss
和e
fss
进行描述,通过相应的表达式计算出显微镜注射针穿刺细胞过程中的稳态位置误差e
pss
、稳态力误差e
fss
。其中,e
pss
和e
fss
满足表达式:
[0042][0043]
其中,k
i
是虚拟有效刚度系数,k
f
是外力系数,用以调整力误差e
f
的权重,是外部环境有效刚度系数,f
d
是理想所需力,x
d
是理想所需位移,x
e
是没有相互作用力时环境的平衡位置,e
pss
是稳态位置误差,e
fss
是稳态力误差,n为根据阻抗模型变化的系数。此外,阻抗模型中设计滑模函数进行自适应控制补偿以减小外界扰动的影响。
[0044]
如图7所示,为以小鼠卵母细胞穿刺为例时的控制系统输入参数随时间变化的坐标图。左图为理想所需力f
d
‑
时间t图,右图为理想所需力位移x
d
‑
时间t图。对于左图,穿刺小
鼠卵母细胞时理想所需力应维持在20mn;对于右图,理想所需位移随时间的斜率k,即理想穿刺速度的大小应维持在0.7m/s。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1