一种培养系统
1.本实用新型涉及培养技术领域,尤其涉及一种培养系统。
背景技术:
2.近年来,将计算机技术和人工智能应用在生物医学领域成为一种趋势。96孔板是一种适用于细胞培养的容器,在生物医学领域应用十分广泛。自动化系统中涉及振荡培养箱的自动化以及机械臂夹取、放置和转移96孔板。为了方便自动化系统整合以及实现96孔板培养过程自动化,需要一个结构合理的96孔板振荡培养系统。
技术实现要素:
3.有鉴于此,本技术提出了一种培养系统,以对现有的培养系统进行改进或提供一种备选的培养系统。
4.根据本技术的一个方面,提供了一种培养系统,其中,所述培养系统包括:
5.机械臂,其用于夹持或释放用于放置待培养物的培养容器;
6.培养箱,其内设有承载所述待培养容器的承载架并设于所述机械臂的工作行程内;以及
7.控制部,其与所述机械臂电连接,以控制所述机械臂夹持或释放所述培养容器,并且所述控制部与所述培养箱电连接,以控制所述培养箱对所述培养容器中的待培养物进行培养。
8.如上所述的培养系统,其中,还包括中转部,所述中转部设于所述机械臂的工作行程内,并用于中转所述培养容器。
9.如上所述的培养系统,其中,还包括实验台,所述机械臂、所述培养箱、所述控制部以及所述中转部中的一个或多个设置于所述实验台上。
10.如上所述的培养系统,其中,所述控制部包括计算机。
11.如上所述的培养系统,其中,所述培养箱内设有控制器、温度传感器以及空调器,其中,所述控制器与所述温度传感器和所述计算机相接,控制所述空调器进行升温或降温。
12.如上所述的培养系统,其中,所述培养箱内还设有电机以及用于感测所述电机的转速的光电传感器,其中,所述控制器基于所述光电传感器感测的转速和所述计算机发送来的设定转速,控制所述电机的转速。
13.如上所述的培养系统,其中,所述培养箱内还设有码盘,所述码盘设于所述电机的传动轴上,所述光电传感器通过感测所述码盘的转速以感测所述电机的转速。
14.如上所述的培养系统,其中,所述培养箱为能够进行振荡的振荡培养箱,所述计算机的计时器记录所述振荡培养箱振荡时间,所述振荡时间达到设定时间后,所述计算机发送停止转动指令给所述控制器使所述振荡培养箱停止转动。
15.如上所述的培养系统,其中,从所述振荡培养箱中夹取所述培养容器放置到所述中转部或从所述中转部夹取所述培养容器放置到所述振荡培养箱时,所述振荡培养箱停止
转动,所述振荡培养箱的特定承载架处于打开状态,所述振荡培养箱开门。
16.如上所述的培养系统,其中,所述承载架的侧部预留有机械臂抓取的空间,所述承载架的挡板具有折角。
17.本技术的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
18.构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施方式及其说明用于解释本技术。在附图中:
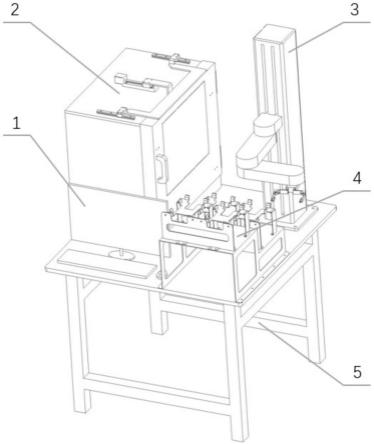
19.图1为本技术提供的培养系统的立体结构示意图;
20.图2为本技术提供的培养系统的系统框图;
21.图3为本技术提供的机械臂的夹爪的示意图;
22.图4为本技术提供的中转部的载板架的示意图;以及
23.图5为本技术提供的承载架的示意图。
24.附图标记说明:
25.1-计算机,2-培养箱,3-机械臂,4-中转部,5-实验台,6-承载架,7-载板架。
具体实施方式
26.需要说明的是,在不冲突的情况下,本技术中的实施方式及各个实施方式中的特征可以相互组合。
27.下面将参考附图并结合实施方式来详细说明本技术。
28.本技术提供了一种培养系统,其中,所述培养系统包括:机械臂3(例如scara机械臂)、培养箱2以及控制部,其中,机械臂3用于夹持或释放用于放置待培养物的培养容器,培养箱2内设有承载培养容器的承载架6并设于机械臂3的工作行程内;以及控制部,与机械臂3电连接,以控制机械臂3夹持或释放培养容器,并且控制部与培养箱2电连接,以控制培养箱2对培养容器中的待培养物进行培养。
29.进一步地,本技术的培养系统还包括中转部4(也可以称为中转站),中转部4设于机械臂3的工作行程内,并用于中转培养容器。
30.进一步地,本技术的培养系统,还包括实验台5,机械臂3、培养箱2、控制部以及中转部4中的一个或多个设置于实验台5上。具体地,机械臂3的夹爪样式和中转部4上载板架7样式以及培养箱2内承载架6样式匹配;为了提高机械臂3夹取或是放置96孔板的精确性,中转部4上的载板架7以及培养箱2内承载架6采用带有折角的样式。
31.在一具体实施例中,控制部包括计算机1。
32.本实用新型控制部分是将培养箱2和机械臂3的功能在计算机1上整合成一个上位机控制软件。
33.具体地,上位机控制软件可以通过指令控制机械臂3完成移动以及夹爪夹取或是放置96孔板的动作;暂存中转站的各个载板架7位置以及培养箱2内各个承载架6初始位置在设备调试过程中确定,设备运行时直接调用。
34.在一具体实施例中,培养容器为96孔板,当然也可以为其他形式的培养容器,在此不做具体限定,现以培养容器为96孔板为例对本技术进行说明,以使本技术清楚,其并非旨
于对本技术的限制。
35.具体地,本技术的培养系统包括计算机1、培养箱2(例如全自动振荡培养箱)、机械臂3、中转部4(还可以称为暂存中转站)以及实验台5组成。本实用新型控制部分是将全自动振荡培养箱和机械臂的功能在计算机上整合成一个上位机控制软件。
36.计算机1、培养箱2、机械臂3以及中转部4放置在实验台5上。培养箱2和暂存中转站4的放置位置需要在机械臂3的工作行程内。
37.设备固定方面,培养箱2、机械臂3和中转部4通过螺栓螺母安装在实验台5上,计算机1放置在实验台5上。线路连接方面,培养箱2和机械臂3的数据线与计算机1主机连接。
38.人机交互界面安装在计算机1上,整个系统的控制都由人机交互界面完成。
39.在一具体实施例中,培养箱2内设有控制器、温度传感器以及空调器,其中,控制器与空调器、温度传感器和计算机相接,其中,控制器基于温度传感器采集的温度和计算机发送来的设定温度,控制空调器进行升温或降温。设备工作时,可以通过人机交互界面设置培养箱2内的工作温度,培养箱2的控制器接收到该温度数值后,会和温度传感器获取的当前设备的实时温度值比较,控制空调器升高温度或是降低温度,实现控制温度的目标。
40.进一步地,培养箱2内还设有电机以及用于感测电机的转速的光电传感器,其中,控制器与电机和光电传感器相接,其中,控制器基于光电传感器感测的转速和计算机发送来的设定转速,控制电机的转速。码盘安装在传动轴上,传动轴转动时,码盘一同转动,光电传感器可以根据码盘转动计算当前传动轴的转速,设备工作时,可以通过人机交互界面设置培养箱2内的工作转速,培养箱2的控制器接收到该转速数值后,会和由光电传感器获取的信息计算得到的当前设备的实时转速值比较,控制电机提高转速或是降低转速,实现控制转速的目标。
41.进一步地,培养箱2为能够进行振荡的全自动振荡培养箱,计算机的计时器记录全自动振荡培养箱2振荡时间,振荡时间达到设定时间后,计算机发送停止转动指令给控制器使全自动振荡培养箱2停止转动。具体地,设备工作时,人机交互界面在设置完全自动振荡培养箱2工作所需的参数后,会设置一个设备的工作时间,将参数发送给全自动振荡培养箱控制器后计算机开启计时,全自动振荡培养箱2开始工作,在计算机计时完成后,人机交互界面会发送停止指令给全自动振荡培养箱2的控制器,全自动振荡培养箱2停止振荡,实现控制振荡时间的目标。
42.如图5所示,承载架6的侧部预留有机械臂3抓取的空间,承载架6的挡板具有折角。
43.此外,摇板上的固定装置可以根据上位机控制软件发送的指令固定96孔板或是松开96孔板。具体地,控制器控制直线电机转动,推板和磁铁固定支架通过螺栓安装在法兰上,直线电机转动带动法兰转动,由于直线轴承和导向轴的导向作用,法兰前后运动,推板和磁铁固定支架也一同运动,推板向前移动至靠前接近传感器的过程可以实现固定96孔板的目标,推板向后运动至靠后接近传感器的过程可以实现松开96孔板的目标。
44.具体地,上位机控制软件可以获取摇板的停止位置,以便机械臂3更新移动坐标值完成夹取或是放置96孔板的动作,其中,上位机控制软件获取摇板的停止位置实际上是全自动振荡培养箱2停止运动后获取全自动振荡培养箱2内激光测距传感器的数值。在一具体实施例中,机械臂3的前端安装了夹爪,可以通过人机交互界面控制机械臂3打开或是关闭夹爪。机械臂3运动到特定位置即可完成夹取或是放置96孔板的目标。
45.具体地,该系统的所有功能都进行了封装,不仅可以通过上位机控制软件控制该系统,自动化系统中其他设备发送指令也可以实现响应。在夹取或是放置96孔板时,需要提供起始板位信息和终止板位信息,放置96孔板到全自动振荡培养箱2时需要额外提供温度值、转速值以及振荡培养时间,接着系统会判断给出条件是否满足要求,从全自动振荡培养箱2中夹取96孔板放置到中转部4时,全自动振荡培养箱2的起始板位需要有板,中转部4的终止板位需要无板,从中转部4夹取96孔板放置到全自动振荡培养箱2时,中转部4的起始板位需要有板,全自动振荡培养箱2的终止板位需要无板,满足要求后,依次进行以下动作,全自动振荡培养箱2停止转动,反馈摇板停止位置给机械臂3,全自动振荡培养箱2内特定承载架处于打开状态,全自动振荡培养箱2开门,机械臂3完成夹取或是放置96孔板的动作,全自动振荡培养箱2关门,全自动振荡培养箱2内特定载板架处于固定状态,调整全自动振荡培养箱2内温度,开启振荡。系统运行时会更新每个载板架和承载架上是否有96孔板的信息。
46.此外,系统上位机控制软件不仅可以通过指令控制全自动振荡培养箱2和机械臂3,还可以获取全自动振荡培养箱2和机械臂3的实时状态信息,提高实验过程的安全性。
47.以上所述仅为本技术的较佳实施方式而已,并不用以限制本技术,凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1