一种智能机器人仿生外形皮肤材料及制作工艺的制作方法
本发明涉及材料加工,具体为一种智能机器人仿生外形皮肤材料及制作工艺。
背景技术:
1、机器人在我们日常生活中已经无处不在,机器人在无接触配送、货物分选、紫外线消毒以及防疫应急处理和辅助作业等方面,都扮演了不可或缺的特殊角色,甚至有人将机器人称为科技 “战疫” 中的汹涌 “后浪”,但是受限于目前触觉传感器在空间分辨率和精度方面存在的瓶颈以及其他原因,机器人在执行复杂任务上的能力远远低于人类。
2、相反作为人类最大的器官,皮肤不仅可以感知力的大小和方向自解耦,对外界刺激的定位精度也可以超越触觉感受器间的平均间距超分辨率,因此人的双手可以完成非常精巧和复杂的任务,比如抓取易碎物品,进行灵巧操作,识别纹理和阅读盲文,而现有的机器人触觉传感器与人类皮肤相比还存在较大差距,为此仿生外形皮肤材料研发成为目前智能机器人领域发展方向之一。
3、然而传统的皮肤材料制作工艺主要提供基本防护功能,所制备材料较为刚性,材料不易发生形变,虽然可以提供外部防护,但是难以适应复杂的形变和外部环境的变化,特殊环境下的适应性较差,对于变化较大的工作条件无法有效应对,因此亟需一种可以灵活变化的智能机器人仿生外形皮肤材料及制作工艺来解决此类问题。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种智能机器人仿生外形皮肤材料及制作工艺,解决现有技术中存在的防护皮肤制备材料较为刚性,材料不易发生形变,难以适应复杂的形变和外部环境的变化的问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现,本发明提供了一种智能机器人仿生外形皮肤材料,成分包括:聚二甲基硅氧烷pdms、磁性纳米流体、可再生生物基、pdms交联剂、聚氨酯弹性体、硅胶。
5、本发明还提供一种智能机器人仿生外形皮肤材料的制作工艺,包括:
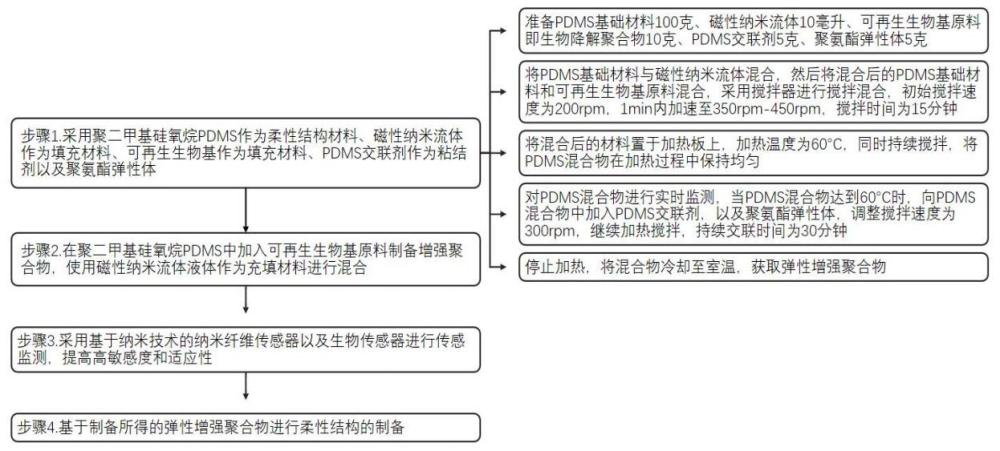
6、步骤1:材料准备,采用聚二甲基硅氧烷pdms作为柔性结构材料、磁性纳米流体作为填充材料、可再生生物基作为填充材料、pdms交联剂作为粘结剂以及聚氨酯弹性体;
7、步骤2:流体填充,在聚二甲基硅氧烷pdms中加入可再生生物基原料制备增强聚合物,使用磁性纳米流体液体作为充填材料进行混合;
8、步骤3:传感器准备,采用基于纳米技术的纳米纤维传感器以及生物传感器进行传感监测,纳米纤维传感器采用可降解材料构成;
9、步骤4:柔性结构制备,基于制备所得的弹性增强聚合物进行柔性结构的制备;
10、本发明进一步地设置为:所述步骤2中,在pdms中加入可再生生物基原料制备增强聚合物步骤具体包括:
11、(1)准备pdms基础材料100克、磁性纳米流体10毫升、可再生生物基原料即生物降解聚合物10克、pdms交联剂5克、聚氨酯弹性体5克;
12、(2)在干燥条件下,首先将pdms基础材料与磁性纳米流体混合,然后将混合后的pdms基础材料和可再生生物基原料混合,采用搅拌器进行搅拌混合,初始搅拌速度为200rpm,1min内加速至350rpm-450rpm,搅拌时间为15分钟;
13、(3)将混合后的材料置于加热板上,加热温度为60°c,同时持续搅拌,将pdms混合物在加热过程中保持均匀;
14、(4)对pdms混合物进行实时监测,当pdms混合物达到60°c时,向pdms混合物中加入pdms交联剂,以及聚氨酯弹性体,调整搅拌速度为300rpm,继续加热搅拌,持续交联时间为30分钟;
15、(5)停止加热,将混合物冷却至室温,获取弹性增强聚合物;
16、本发明进一步地设置为:所述步骤2中,将pdms基础材料和磁性纳米流体混合方式具体为:
17、将pdms基础材料和磁性纳米流体分别称量;
18、使用搅拌器持续以200rpm的搅拌速度,搅拌10分钟,将磁性纳米流体均匀分散在pdms中;
19、再将混合后的材料置于加热板上,加热温度为50°c,继续持续搅拌10分钟,制得混合后的pdms基础材料;
20、本发明进一步地设置为:所述生物降解聚合物为聚乳酸、聚羟基脂肪酸酯、淀粉基塑料、壳聚糖中的一种或几种;
21、本发明进一步地设置为:所述纳米纤维传感器基础材料包括聚合物和碳纳米管,传感器的支架结构采用生物降解材料;
22、将纳米纤维传感器嵌入生物降解支架结构中,形成完整的传感器装置;
23、本发明进一步地设置为:所述纳米纤维传感器表面细微结构用于模拟自然皮肤的纤维结构,纳米纤维传感器用于感应温度、湿度变化,检测光线的强度和颜色信息;
24、本发明进一步地设置为:所述生物传感器集成生物识别元件,包括特定dna探针和抗体,用于检测周围环境中的生物体和细菌、病毒微生物;
25、本发明进一步地设置为:所述步骤4中,根据实际机器人的形状和运动需求设计柔性结构的外形;
26、本发明进一步地设置为:所述步骤4中,进行柔性结构的制备步骤具体包括:
27、准备柔性材料,包括步骤1中制备得到的弹性增强聚合物,以及硅胶、聚氨酯弹性体,其中弹性增强聚合物占比70%,聚氨酯弹性体占比10%,硅胶占比20%;
28、在室温下,将聚氨酯弹性体和硅胶按照1:2的比例混合,采用搅拌器以200rpm的搅拌速度进行搅拌,持续15分钟;
29、将混合物放置在加热板上,然后加入交联剂同时进行搅拌,温度保持在60°c持续30min,制得柔性混合物,将柔性混合物涂覆包裹在弹性增强聚合物外部,然后在外层柔性混合物内嵌入传感器;
30、停止加热后让混合物自然冷却至室温,制得皮肤材料。
31、(三)有益效果
32、本发明提供了一种智能机器人仿生外形皮肤材料及制作工艺。具备以下有益效果:
33、本技术所提供的智能机器人仿生外形皮肤材料制作工艺,首先,采用聚二甲基硅氧烷pdms作为柔性结构材料,为机器人外形提供了高度可塑性和适应性,pdms具有卓越的柔软性、形状记忆效应和可调节的硬度,同时,加入可再生生物基原料,生物降解聚合物,提高弹性,然后在pdms中加入磁性纳米流体,在外部磁场的调节下,可以进行形体灵活变化,使得机器人的外形调整更为迅速、精准,为机器人在复杂环境中执行任务提供了更高的灵活性,同时传感器的集成进一步提高了机器人的感知能力,纳米纤维传感器通过基于纳米技术的制备,模拟自然皮肤的纤维结构,同时采用可降解材料制成,增加了与生物体的相容性,传感器在皮肤外层进行嵌入整合,能够感知温度、湿度、光线强度和颜色信息,为机器人提供了更为丰富的环境感知,生物传感器的集成增加了机器人使用场景,通过集成特定dna探针和抗体,生物传感器能够检测周围环境中的生物体、细菌和病毒微生物,可以为机器人在医疗、环境监测领域提供应用支持。
34、解决了现有技术中存在的防护皮肤制备材料较为刚性,材料不易发生形变,难以适应复杂的形变和外部环境的变化的问题。
- 还没有人留言评论。精彩留言会获得点赞!