一种发酵饲料搅拌控制方法及装置与流程
本发明涉及饲料发酵,具体而言,涉及一种发酵饲料搅拌控制方法及装置。
背景技术:
1、气体搅拌是一种在液体或半流体系统中使用气体来产生搅拌或混合效果的过程。这种搅拌方式通过向液体中注入气体,引起气泡的形成和上升,从而产生涡流和搅拌效应。气体搅拌能够在液体中形成气泡,从而实现液体的均匀混合。与传统机械搅拌相比,气体搅拌构造简单、机械性磨损小、运行费用低效率高。
2、然而,当前利用气体搅拌进行发酵饲料生产时存在一些问题,例如:相比于机械搅拌和水力搅拌,由于气体搅拌的气体来自储气柜,而冬天储气柜内气体温度相对较低,特别是无加热装置的分体式储气柜,用低温气体进行搅拌显然对饲料发酵过程不利;只利用单一的气体搅拌还会存在搅拌不充分的问题,当原料沉积较多时,单一的气体搅拌方式容易因管路堵塞造成搅拌不足问题,不利于发酵饲料的快速生产。
3、因此,有必要设计一种混合搅拌控制方法及装置用以解决当前发酵饲料生产中存在的问题。
技术实现思路
1、鉴于此,本发明提出了一种发酵饲料搅拌控制方法及装置,旨在解决当前发酵饲料生产中冬季使用气体搅拌致使发酵效果变差、单一气体搅拌造成搅拌不充分的问题。
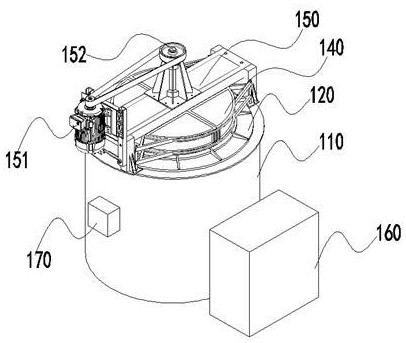
2、一方面,本发明提出了一种发酵饲料搅拌装置,包括:
3、外壳体;
4、搅拌罐,设置在所述外壳体内部,所述搅拌罐用于发酵饲料;所述搅拌罐的侧面且靠近底部的位置设置有气力装置,所述气力装置上设置有若干个吹气嘴,所述气力装置与所述搅拌罐连接位置设置有第一电磁阀;所述搅拌罐的侧部还设置有观察窗;
5、保温层,设置在所述外壳体与所述搅拌罐之间,所述保温层在与所述观察窗对应位置设置有图像传感器,所述图像传感器用于拍摄所述观察窗的图像数据;
6、密封层,设置在所述搅拌罐的上部,所述密封层用于对所述搅拌罐进行密封;
7、上盖体,设置在所述密封层的上部,所述上盖体上固定设置有机械电机和搅拌棒,所述搅拌棒穿过所述密封层并延伸至所述搅拌罐的腔体内,所述搅拌棒用于搅拌所述发酵饲料;所述机械电机用于驱动所述搅拌棒;
8、供气装置,设置在所述外壳体的一侧,所述供气装置的连接管道与所述气力装置相连通;所述连接管道在所述保温层与搅拌罐之间设置有第二电磁阀和第二吹气嘴,所述第二吹气嘴用于向所述保温层内充入气体;
9、控制装置,用于控制气体搅拌与机械搅拌,所述控制装置包括采集单元、调整单元和判断单元,其中,
10、所述采集单元被配置为通过所述图像传感器获取所述观察窗的第一图像数据,根据所述第一图像数据获取沉积层厚度,根据所述沉积层厚度判断是否进行气体搅拌;
11、当所述采集单元判定进行气体搅拌后,所述采集单元还被配置为采集环境温度并根据所述环境温度判定是否对充入所述搅拌罐的气体进行加热;
12、所述调整单元被配置为在判断是否对充入所述搅拌罐的气体进行加热后,所述气体搅拌运行第一预设时间后采集所述观察窗的第二图像数据,根据所述第二图像数据与所述第一图像数据获取沉积层的变化速率,根据所述变化速率判断是否对充气速率进行调整;
13、所述判断单元被配置为在确定是否调整所述充气速率后,经过第二预设时间后采集所述观察窗的第三图像数据,根据所述第三图像数据判断是否存在沉积层;
14、若所述判断单元判定存在沉积层,则开启所述机械电机进行机械搅拌;
15、若所述判断单元判定不存在沉积层,则不开启所述机械电机,并经过第三预设时间后停止所述气体搅拌。
16、进一步的,所述采集单元根据所述沉积层厚度判断是否进行气体搅拌,包括:
17、所述采集单元将沉积层厚度h与预先设定的沉积层厚度阈值hmax进行比对,根据比对结果判断是否进行所述气体搅拌;
18、在第一厚度比对结果下,所述采集单元判定开启所述气体搅拌;
19、在第二厚度比对结果下,所述采集单元判定不开启所述气体搅拌;
20、其中,所述第一厚度比对结果为h>hmax,所述第二厚度比对结果为h≤hmax。
21、进一步的,当所述采集单元判定开启所述气体搅拌时,还包括:
22、所述采集单元计算所述沉积层厚度h与所述沉积层厚度阈值hmax的厚度差值△h,△h=h-hmax;
23、所述采集单元控制所述供气装置的充气速率与所述厚度差值△h成正相关关系。
24、进一步的,当所述采集单元判定开启所述气体搅拌后,所述采集单元根据所述环境温度判断是否对充入的气体进行加热时,包括:
25、所述采集单元将环境温度w与预先设定的环境温度阈值wmin进行比对,根据比对结果判断是否对充入所述搅拌罐的气体进行加热;
26、在第一温度比对结果下,所述采集单元判定对充入所述搅拌罐的气体进行加热;
27、在第二温度比对结果下,所述采集单元判定不对充入所述搅拌罐的气体进行加热;
28、其中,所述第一温度比对结果为w<wmin,所述第二温度比对结果为w≥wmin。
29、进一步的,当所述采集单元判定对充入所述搅拌罐的气体进行加热时,还包括:
30、所述采集单元采集所述保温层内空气的温度wb与所述搅拌罐内的温度wj,将所述保温层内空气的温度wb与搅拌罐内的温度wj进行比对,根据比对结果判断是否对所述保温层进行加热;
31、在第一内层温度比对结果下,所述采集单元判定对所述保温层进行加热;
32、在第二内层温度比对结果下,所述采集单元判定不对所述保温层进行加热;
33、其中,所述第一内层温度比对结果为wb<wj,所述第二内层温度比对结果为wb≥wj。
34、进一步的,当所述采集单元判定对充入所述搅拌罐的气体进行加热后,包括:
35、所述采集单元获取所述环境温度w与环境温度阈值wmin的温度差值△w,△w=wmin-w;
36、所述采集单元控制所述供气装置对充入所述搅拌罐的气体的加热功率与所述温度差值△w成正相关关系。
37、进一步的,所述调整单元根据所述变化速率判断是否对充气速率进行调整时,包括:
38、所述调整单元根据所述第二图像数据获取第二沉积层厚度h20,根据所述第二沉积层厚度h20与沉积层厚度h获得所述变化速率s,s=(h-h20)/t1,其中t1表示所述第一预设时间;
39、所述调整单元将所述变化速率s与预先设定的变化速率阈值smin进行比对,根据比对结果判断是否对所述充气速率进行调整;
40、在第一速率判断结果下,所述调整单元判定对所述充气速率进行调整,并控制所述供气装置以调整后的充气速率运行;
41、在第二速率判断结果下,所述调整单元判定不对所述充气速率进行调整,并控制所述供气装置维持原充气速率运行;
42、其中,所述第一速率判断结果为s<smin,所述第二速率判断结果为s≥smin。
43、进一步的,当所述调整单元判定对所述充气速率进行调整时,包括:
44、所述调整单元还被配置为将所述变化速率s分别与预先设定的第一预设变化速率s1和第二预设变化速率s2进行比对,s1<s2<smin,根据比对结果确定速率调整系数对所述供气装置的充气速率进行调整;
45、在第一速率比对结果下,所述调整单元确定第一速率调整系数a1对所述供气装置的充气速率进行调整;
46、在第二速率比对结果下,所述调整单元确定第二速率调整系数a2对所述供气装置的充气速率进行调整;
47、在第三速率比对结果下,所述调整单元确定第三速率调整系数a3对所述供气装置的充气速率进行调整;
48、其中,所述第一速率比对结果为s≤s1,所述第二速率比对结果为s1<s≤s2,所述第三速率比对结果为s2<s<smin,a1>a2>a3。
49、进一步的,所述判断单元根据所述第三图像数据判断是否存在沉积层时,包括:
50、所述判断单元根据所述第三图像数据获取第三沉积层厚度h30,根据所述第三沉积层厚度h30判断是否存在沉积层;
51、当h30>0时,所述判断单元判定存在沉积层,并开启所述机械电机进行所述机械搅拌;
52、当h30=0时,所述判断单元判定不存在沉积层,不开启所述机械电机,并经过第三预设时间后停止所述气体搅拌;
53、当所述判断单元判定开启所述机械电机时,包括:
54、所述判断单元控制所述机械电机的转动速率与所述第三沉积层厚度h30成正相关关系,当所述第三沉积层厚度h30等于0时关闭所述机械电机。
55、与现有技术相比,本发明的有益效果在于:结合了气体搅拌和机械搅拌,气体搅拌能够以较低成本均匀混合液体,而当气体搅拌无法满足搅拌需求时,采用机械搅拌解决物料沉积问题,使得发酵饲料的生产更为高效。配备了控制装置,通过采集图像传感器的数据,智能判断发酵过程中是否存在沉积层,以及是否需要进行气体搅拌或机械搅拌。提高了发酵过程的自动化和可控性。根据环境温度判断是否对充入搅拌罐的气体进行加热,从而解决了冬天气体温度较低对气体搅拌效果的不利影响。通过检测沉积层的变化速率,调整气体的充气速率,从而更加精准地控制气体搅拌的效果,避免搅拌不足或过度的问题。设置了观察窗和图像传感器,可以实时观察发酵过程中的情况,并利用图像数据进行判断和调整,提高了生产过程的自动化程度。
56、另一方面,本技术还提出一种发酵饲料搅拌控制方法,应用于上述发酵饲料搅拌装置中,包括:
57、通过图像传感器获取观察窗的第一图像数据,根据所述第一图像数据获取沉积层厚度,根据所述沉积层厚度判断是否进行气体搅拌;
58、当判定进行气体搅拌后,采集环境温度并根据所述环境温度判定是否对充入搅拌罐的气体进行加热;
59、在判断是否对充入所述搅拌罐的气体进行加热后,所述气体搅拌运行第一预设时间后采集所述观察窗的第二图像数据,根据所述第二图像数据与所述第一图像数据获取沉积层的变化速率,根据所述变化速率判断是否对充气速率进行调整;
60、在确定是否调整所述充气速率后,经过第二预设时间后采集所述观察窗的第三图像数据,根据所述第三图像数据判断是否存在沉积层;
61、若判定存在沉积层,则开启机械电机进行机械搅拌;
62、若判定不存在沉积层,则不开启所述机械电机,并经过第三预设时间后停止所述气体搅拌。
63、可以理解的是,上述发酵饲料搅拌控制方法及装置具有相同的有益效果,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!