一种细胞转瓶培养自动换液机的制作方法
本发明涉及生物培养领域,尤其是一种细胞换液机。
背景技术:
1、目前实验人员在进行转产进行大规模培养实验摸索阶段时,需要对细胞培养转瓶进行大量的重复性倾倒操作,繁复且耗费精力。重复性操作持续时间长,会造成操作人员疲劳,从而导致操作动作变形而引起的污染从而影响实验的数据准确性。
2、在无菌生产过程中人的活动是引起所在环境污染的最大因素,所以降低人参与生产过程的比重就显得尤为重要。
3、根据gmp要求无菌生产需要在洁净室或无菌生物隔离器内进行,洁净室和隔离器内环境为无尘无菌环境,人在代谢过程中会释放和分泌污染物,人体表面、衣服能沾染、携带污染物,人在洁净室内的各种动作也会产生微粒和微生物,会污染破坏无菌环境。
4、目前在细胞培养中,无菌环境是最大的难题,如何保证自动化设备表面无菌,且满足gmp标准是很难的保证的。恒温转瓶培养自动化技术方面,要在一定时间内对转瓶迅速升温至恒温,也是很难保证细胞培养环境温度。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种细胞转瓶培养自动换液机。本发明通过自动化的方式,将操作人员在生产过程中解放出来,既有利于实现标准化操作流程,又能保证产品的均一性。
2、本发明解决其技术问题所采用的技术方案是:
3、一种细胞转瓶培养自动换液机包括无菌隔离器和无菌执行组件,无菌隔离器处于无菌环境中,无菌执行组件位于无菌隔离器的内部;
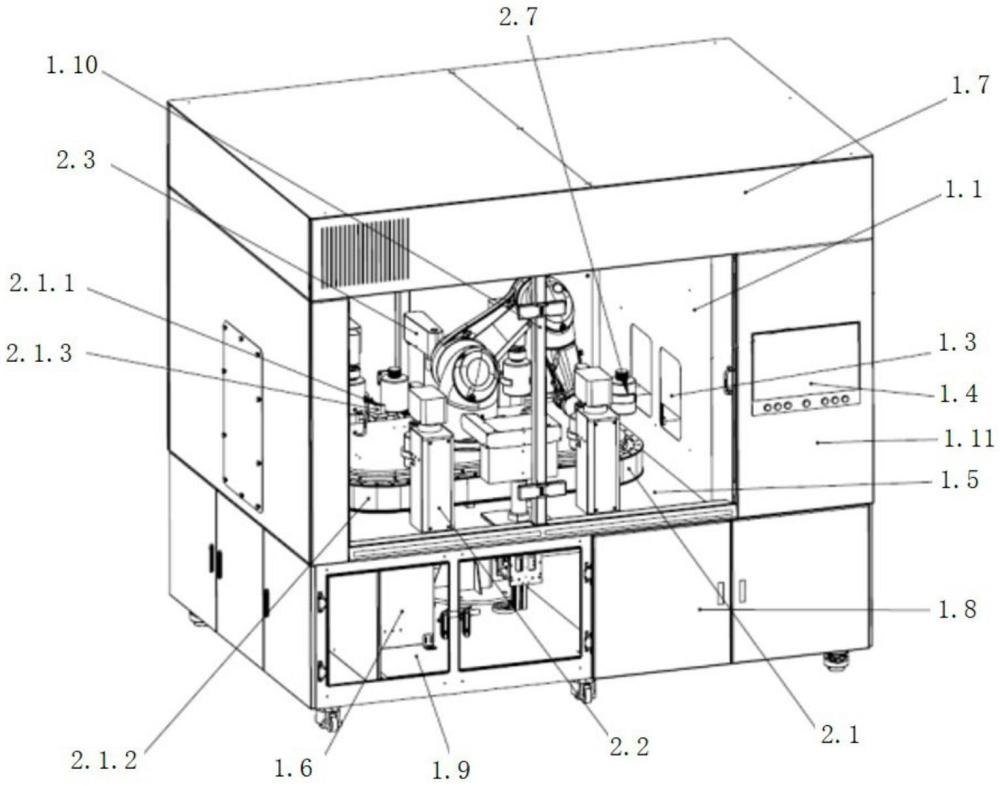
4、操作仓(1.5)为与外界传递物料的一个内部传递空间,操作仓(1.5)由316l级别不锈钢板,通过焊接组成一个带有一侧开口的箱体,箱体的上方为空气净化系统(1.7),正下方是回风系统(1.8),空气净化系统(1.7)的下方并排设有传递仓(1.1)和操作仓(1.5),传递仓(1.1)和操作仓(1.5)的下方并排设有电控箱(1.6)和回风系统(1.8),传递仓(1.1)和操作仓(1.5)与电控箱(1.6)和回风系统(1.8)之间由底板隔开,传递仓(1.1)内部设有上架体框架(1.10),上架体框架(1.10)竖立于操作仓(1.5)中,转瓶仓门(1.12)与上架体框架(1.10)通过螺栓连接,电控箱(1.6)的下方设有底部支撑板(1.9),电控箱(1.6)中安装电控设备;电控箱(1.6)和底部支撑板(1.9)通过螺栓连接,空气净化系统(1.7)与上架体框架(1.10)通过螺栓连接,人机交互屏(1.4)位于传递仓(1.1)外侧,位于无菌隔离器的正面,镶嵌于外部钣金(1.11)内,并通过螺栓进行固定,人机交互屏(1.4)为操作界面,设备的运行参数及控制交互在此屏幕上完成;无菌执行组件中,多载体运输组件(2.1)中的多载体动子(2.1.1)利用磁吸吸附在多载体运输组件(2.1)的外围磁铁上,多载体动子(2.1.1)工作时在多载体运输组件(2.1)的轨道上进行运动,多载体动子(2.1.1)在工作时围绕本体(2.1.2)外围运动,多载体动子(2.1.1)上安装的夹具(2.1.3)夹持住细胞培养转瓶,将处理完毕的细胞培养转瓶运至下一工位,细胞培养转瓶在传递仓(1.1)进行静置后,用洁净版本机械臂(2.6)上的洁净版抓手(2.7)将细胞培养转瓶抓放至多载体运输组件(2.1)上,完成上瓶操作;全自动旋盖组件(2.2)、无菌灌装组件(2.3)、无菌换液组件(2.5)的底部均有螺纹孔,采用螺栓将全自动旋盖组件(2.2)、无菌灌装组件(2.3)、无菌换液组件(2.5)固定于操作仓内底板(1.13),围绕多载体动子(2.1.1)进行工作,。全自动旋盖组件(2.2)、无菌灌装组件(2.3)、无菌换液组件(2.5)环绕在多载体运输组件(2.1)周围,带动细胞培养转瓶移动至全自动旋盖组件(2.2)、无菌灌装组件(2.3)、无菌换液组件(2.5)的工作范围,并进行相应组件动作。
5、所述无菌隔离器中,操作仓(1.5)的一侧开口,设有操作主仓门(1.3),传递仓(1.1)与操作仓(1.5)之间设有传递仓门(1.2),传递仓(1.1)的一侧固定传递仓门(1.2),另外一侧固定操作主仓门(1.3);转瓶仓门(1.12)与操作仓(1.5)内的上架体框架(1.10)通过螺栓相连,空气净化系统(1.7)通过螺栓固定于传递仓(1.1)和操作主仓(1.5)的上方;传递仓门(1.2)为手动平开门,操作主仓门(1.3)的运动方式为上下运动,两者均设有密封硅胶条,传递仓门(1.2)关闭后,操作仓(1.5)内不与外界的气流交换,操作主仓门(1.3)与传递仓门(1.2)不可同时打开,造成操作仓(1.5)的空气不通过空气净化系统(1.7)与外界有气体交换造成环境的破坏。
6、转瓶仓门(1.12)为上下运动,有密封硅胶条,在关闭以后起到的作用为转瓶区域温度保护。
7、空气净化系统(1.7)将舱外的非洁净空气通过净化系统,将干净的空气吹垂直吹至操作仓底板(1.13),将灌装位置保持a级环境。
8、回风系统(1.8)将空气净化系统(1.7)吹来的空气引出,防止空气反弹。
9、无菌转瓶机(2.4)用螺栓固定于转瓶仓内,工作时转瓶仓门(1.12)自动开关,无菌转瓶机(2.4)对细胞转瓶进行旋转作业,对细胞培养转瓶进行旋转培养以及匀液,步进电机(2.6.1)在无菌转瓶机(2.4)一侧排布两个,细胞培养转瓶放置在辊轮(2.6.2)上方,步进电机(2.6.1)与辊轮(2.6.2)相连,步进电机(2.6.1)带动辊轮(2.6.2)转动,从而带动细胞培养转瓶旋转。
10、洁净版抓手(2.7)与洁净版本机械臂(2.6)组成为一体,洁净版本机械臂(2.6)通过螺栓安装在操作仓内底板(1.13)上,洁净版抓手(2.7)安装在洁净版本机械臂(2.6))上,洁净版抓手(2.7)利用螺栓与洁净版本机械臂(2.6)六轴执行端固定,进行夹取放置动作,洁净版本机械臂(2.6)在不污染使用环境的条件下对细胞培养转瓶进行抓取放置转移位置的动作,洁净版抓手(2.7):通过此抓手对细胞培养转瓶进行抓取和放置的动作。洁净版本指机械臂可耐受各种化学药品进行消毒熏蒸,且完成符合制药车间gmp要求。
11、全自动旋盖组件(2.2)对细胞培养转瓶进行开盖和将盖子旋回的作用。全自动旋盖组件(2.2)如图3所示,包括组件本体、旋盖机、抓手和z轴移动结构,组件本体分为上下两部分,上下两部分之间设有z轴移动结构,z轴移动结构在竖直方向进行上下移动,组件本体的下半部分不动,z轴移动结构带动组件本体的上半部分上下移动,旋盖机位于组件本体的上半部分的一侧,组件本体的下半部分设有一个抓手,抓手打开时,远离组件本体的下半部分,抓手采用弧形结构,用于将细胞培养转瓶抓放,且细胞培养转瓶的上方正对旋盖机的下方。
12、如图4所示,无菌灌装组件(2.3)对细胞培养转瓶进行定量无菌灌装,无菌灌装组件(2.3)包括打液走管硅胶圈(2.3.1)、打液罩(2.3.2)、z轴移动柱(2.3.3)、气缸固定板(2.3.4),打液走管硅胶圈(2.3.1)用于插入打液软管,打液罩(2.3.2)将细胞培养转瓶瓶口部分完全覆盖打液,气缸固定板(2.3.4)位于z轴移动柱(2.3.3)下方与气缸固定,为z轴移动柱(2.3.3)提供动力,打液罩(2.3.2)正对细胞培养转瓶瓶口上方进行打液。
13、如图5所示,无菌换液组件(2.5)对细胞培养转瓶内部的液体进行倾倒工作,无菌换液组件(2.5)中,z轴驱动组件(2.5.5)在无菌换液组件(2.5)底部,z轴驱动组件(2.5.5)的上半部分与x轴驱动组件(2.5.4)相连,x轴驱动组件(2.5.4)在绕y轴驱动组件(2.5.1)底部,绕y轴驱动组件(2.5.1)的一端水平放置于x轴驱动组件(2.5.4)上方,绕y轴驱动组件(2.5.1)的另一端悬空,在绕y轴驱动组件(2.5.1)悬空部分的末端设置有无菌换液夹具(2.5.2),在绕y轴驱动组件(2.5.1)悬空部分的中端下方设置有漏斗(2.5.3)。
14、本发明有益效果是重复性的操作是机械设备擅长的部分,利于实现自动化,设备不会出现疲劳而产生误操作,可以减少因人的参与造成的产品合格率波动。减少人员参与,从而使得企业降低管理成本以及资金成本。本发明采用最新的多载体运输组件,此组件可满足在gmp生产车间使用,与传统运输组件相比,多载体运输组件可随意设置点位,每个动子即为一个个体,不受限制。也选用洁净版本机械臂进行工作,此机械臂可满足各种浓度溶液和蒸气消毒熏蒸。自主研发全自动旋盖组件、无菌灌装组件、无菌转瓶机、无菌换液组件替代人工手动操作,实现全流程自动化。
- 还没有人留言评论。精彩留言会获得点赞!