用于控制用于机动车辆车轴的驱动系统的方法与流程
[0001]
本发明涉及一种用于控制用于机动车辆车轴的驱动系统的方法。该驱动系统包括至少一个驱动单元(例如,电机或内燃机)、由该驱动单元驱动的驱动轴、第一输出轴和(公共车轴的)第二输出轴、以及将驱动轴连接到第一输出轴的第一离合器和将输入轴连接到第二输出轴的第二离合器。此外,提供了至少用于控制离合器的控制单元(任选地用于额外控制驱动单元以及用于确定驱动轴和输出轴的转速)。离合器被分配给公共车轴的输出轴。
背景技术:
[0002]
例如,提供这种类型的驱动系统用于由驱动单元根据需要提供的扭矩的传递和分配。例如,从de 10 2007 030 091 a1已知这种类型的驱动系统。
[0003]
例如,从de 10 2007 056 174 b3已知一种设置在马达和变速器之间的离合器的微滑移控制。通过离合器传递的扭矩通过滑移控制单元自动适应由驱动单元提供的扭矩。
技术实现要素:
[0004]
本发明的目的是提供一种用于驱动系统的控制系统,在该驱动系统中,车轴的车轮可以分别通过所述车轮的专用离合器连接到公共驱动轴。
[0005]
根据权利要求1的特征的方法有助于这一目的。有利的实施例是从属权利要求的主题。权利要求中单独规定的特征可以以技术上有意义的方式彼此组合,并且可以由来自说明书中的说明性实质内容和来自附图中的细节来补充,其中示出了本发明的进一步实施例变型。
[0006]
提出了一种用于控制用于机动车辆车轴的驱动系统的方法。驱动系统具有至少一个驱动单元、由驱动单元驱动的驱动轴、第一输出轴和第二输出轴、以及将驱动轴连接到第一输出轴的第一离合器和将驱动轴连接到第二输出轴的第二离合器,此外还有用于控制离合器的控制单元。离合器能够至少在某些操作点处(特别是在机动车辆操作期间连续地)通过微滑移控制来操作,在该微滑移控制中,在相应的离合器上设定驱动轴和输出轴之间的大于零转每分钟且至多50转每分钟、特别是至多20转每分钟的速度差。
[0007]
该方法至少包括以下步骤:a)建立机动车辆的行驶状态,其中,至少检测或相应地确定以下行驶状态:向前直行行驶和在牵引模式下转弯;b)针对每个离合器选择和应用控制策略,其中,控制策略对于不同的行驶状态是不同的。
[0008]
微滑移控制包括理想地在任何时间点处在离合器上设定大于零转每分钟的速度差。这里应避免过大的速度差,因为摩擦热是由于离合器中的滑移而产生的。这种摩擦热会导致离合器应力过大。
[0009]
通过微滑移控制,特别地可以使驱动单元通过离合器所需的扭矩总是精确地对应于能够在车轮和路面之间传递的扭矩。此外,机动车辆或相应地驱动系统的调谐可以被简
化,因为扭矩要求总是根据出现的滑移来设定。因此,可以省去控制器的任何参数化。
[0010]
因此,驱动系统的控制可以独立于驱动单元的致动而发生。当操作策略(例如用于驱动混合动力车辆的混合动力策略)由制造商而不是控制离合器的控制单元的制造商提供时,这是特别有利的。
[0011]
向前直行行驶特别地包括机动车辆沿着(基本上)笔直路线的运动(因此没有沿着弯道的行驶)。这里,特别地,不存在转向系统或方向盘或相应地车轮的(可预定义的最大)转向角。特别地,向前直行行驶还包括曲率半径大于500米的路线。
[0012]
相反,转弯包括机动车辆沿着弯曲路线的运动(因此不是沿着笔直路线行驶)。这里,特别是存在转向系统或方向盘的(可预定义的最小)转向角。转弯特别地包括曲率半径小于1000米、特别是最大值为500米的弯道。
[0013]
可以通过路线的(确定的)转向角和/或曲率或相应地曲率半径来规定向前直行行驶和转弯的界限,其中,与向前直行行驶相比,用于转弯的预定义极限值限定更大的转向角和/或更小的曲率半径。该界限值可以可变地可调整和/或可预定义。
[0014]
在机动化机动车辆中,推进模式是这样的行驶状态,在该状态下,当力配合未断开时(例如,当离合器未被压下时),驱动单元被机动车辆带动,从而保持旋转。
[0015]
相反,驱动单元驱动机动车辆的行驶状态被称为牵引模式。
[0016]
控制策略可以包括离合器的特定设置和/或特定功能模式或相应地操作模式。可以在至少一个存储介质上存储和检索多个控制策略。
[0017]
(自动地和/或立即地)在建立预定义的行驶状态中的一种时,可以选择分配给该建立的行驶状态的控制策略并将其应用于离合器(在该行驶状态的持续时间内)。
[0018]
特别提供了用于控制驱动系统的方法,其中两个离合器设置在机动车辆的公共车轴上,其中机动车辆的一个车轮分别通过两个离合器中的一个以扭矩传递方式连接到机动车辆的驱动单元。这两个离合器可以取代可以用于补偿不同车轮速度的常见的差速器。
[0019]
这种离合器和驱动系统的结构可以描述如下。例如,多盘离合器可以用作离合器,其中多盘离合器外盘以旋转固定的方式连接到外盘托架,并且内盘以旋转固定的方式连接到内盘托架,并且每个盘托架以旋转固定的方式连接到驱动轴或相应的输出轴。由于施加了沿轴向方向作用的闭合力(由于激活压力),所以在其它离合器中,摩擦副中的盘相互接触,使得扭矩可以通过离合器从驱动轴传递到相应的输出轴。
[0020]
两个离合器中的至少一个可以是液压致动的离合器,优选两个离合器。在液压激活的离合器的情况下,激活压力通过液压流体传递到离合器。液压流体可以通过泵(其也可以电动操作)加压。
[0021]
两个离合器中的至少一个(优选两个离合器)可以是电激活的离合器。在电激活的离合器的情况下,操作压力直接由电机产生,例如由能够通过电机旋转的斜坡组件产生。
[0022]
由于每个离合器的激活,机动车辆的公共车轴的一个车轮可以特别地以扭矩传递的方式连接到驱动单元。
[0023]
至少一个离合器(特别地是两个离合器)优选为多盘离合器。
[0024]
特别地,车轴能够通过转向系统(例如包括方向盘,例如可由驾驶员致动以偏转车轴的车轮)来转向,该转向系统具有用于致动转向的转向驱动装置(例如动力转向装置或类似装置)。在牵引模式下转弯时,转向驱动装置受到恢复扭矩的冲击,以将转向装置重置为
向前直行行驶状态。
[0025]
作为微滑移控制的结果,驱动单元的扭矩可以以已知的分配传递到车轴的车轮。这里通过相应离合器传递的扭矩总是已知的。从这些扭矩的差异中,可以特别地导出转向系统将被(附加地)施加的恢复扭矩,以便转向返回到非偏转状态(向前直行行驶)。
[0026]
已经观察到,当在牵引模式下在一个车轴的车轮上设置扭矩差时(例如,使用限滑差速器,或者也使用具有两个可控离合器的车轴,其中外侧车轮用离合器锁定;或者作为微滑移控制的结果),可以发生以下效果:作用在转向上并且在不设定扭矩差或没有微滑移控制的情况下自动恢复转向的车轮的恢复扭矩可能不再存在。因此,由于例如由转向车轴上的微滑移控制产生的扭矩差,现在可能出现转向系统(例如,当用户放开方向盘时,因此在自动转向系统的情况下)保持在锁定状态或者甚至进一步改变到偏转位置的情况。
[0027]
特别地,恢复扭矩被确定为至少一个转向锁定角和扭矩差的函数,扭矩差是通过第一离合器传递的第一扭矩和通过第二离合器传递的第二扭矩之间的差。
[0028]
优选地,转向系统通过恢复扭矩以自动方式被设定或转移到向前直行行驶状态(因此没有用户的任何干预)。
[0029]
用于向前直行行驶状态的第一控制策略特别地包括用于第一离合器和用于第二离合器的相互独立的微滑移控制。这特别地意味着每个离合器被单独控制,特别是(例如,排他地)作为相应离合器中滑移(因此特别是相应离合器的内盘托架和外盘托架之间的滑移)的函数。在此,一个离合器上设定的扭矩没有被考虑,特别是没有被另一个离合器考虑,并且因此对后者的控制没有直接影响。
[0030]
第一控制策略优选地用于前进档(机动车辆的向前运动)和倒档(机动车辆在相反方向上的运动,也就是说向后运动)的向前直行行驶状态。
[0031]
特别地,至少附加地检测到以下驾驶状态:在推动模式下转弯。
[0032]
用于在推进模式下的行驶状态转弯的第二控制策略特别地包括用于弯道内侧的离合器的微滑移控制,其中弯道外侧的离合器作为弯道内侧的离合器的函数被控制,使得由弯道外侧的离合器传递的第一扭矩t1对应于弯道内侧的离合器的第二扭矩t2,所述第二扭矩t2已经被改变了因子k。因此,以下特别适用:t1 = k * t2。
[0033]
用于在牵引模式下转弯的行驶状态的第三控制策略特别地包括用于弯道外侧的离合器的微滑移控制,其中弯道内侧的离合器作为弯道外侧的离合器的函数被控制,使得由弯道内侧的离合器传递的第一扭矩t1对应于弯道外侧的离合器的第二扭矩t2,所述第二扭矩已经改变了因子k。因此,以下特别适用:t2 = k * t1。
[0034]
在第二和第三控制策略中,一个离合器分别通过微滑移控制来控制,其中相应的另一个离合器作为由微滑移控制控制的该离合器的函数来操作(排他地)。
[0035]
用于转换扭矩的因子k分别都用于这里的第二和第三控制策略。对于两种控制策略,因子k可以以相同的方式确定。
[0036]
特别地,因子k不是常数,而是具有在0和1之间的值,该值取决于参数而变化。在特殊情况下,诸如在车轴的一个车轮具有第一摩擦系数且另一个车轮具有不同的第二摩擦系数的路面上起步,该因子也可以大于1。
[0037]
这种特殊情况包括例如在牵引模式下转弯,其中弯道外侧的车轮位于结冰的表面上(具有非常低的摩擦系数)。在这种情况下,位于弯道内侧的车轮(或相应地位于弯道内侧的离合器)也必须能够传递显著更大的扭矩,因为否则机动车辆将会停止。这里的因子也可以在1和10之间。
[0038]
该因子特别地被确定为以下参数中的至少一者的函数:机动车辆的转向系统(例如,方向盘)的转向锁定角;机动车辆的速度;弯道内侧车轮和弯道外侧车轮之间的最小扭矩差;横摆角速度差(在机动车辆上测量的横摆角速度和基于转向运动的机动车辆的理论横摆角速度之间的差;横摆角速度差可以用于确定是否存在转向不足或转向过度);驱动轴的扭矩;车轴车轮的速度差(例如弯道内侧的车轮和弯道外侧的车轮之间的速度差)。
[0039]
特别地,机动车辆的公共车轴的一个车轮可以分别通过激活每个离合器以扭矩传递的方式连接到驱动单元。
[0040]
驱动单元优选为电机(或内燃机)。特别地,电机(或内燃机)可以是用于驱动机动车辆的唯一驱动单元。特别地,还可以有第二从动车轴,其中,优选地提供用于驱动第二车轴的另外的驱动单元(例如,内燃机或另外的电机)。
[0041]
特别地,在相应离合器上的微滑移控制处设定驱动轴和输出轴之间的大于零转每分钟和至多5转每分钟的扭矩差。
[0042]
还提出了一种机动车辆,其至少具有用于机动车辆的至少一个车轴的一个驱动系统。驱动系统具有至少一个驱动单元、由驱动单元驱动的驱动轴、第一输出轴和第二输出轴、以及将驱动轴连接到第一输出轴的第一离合器和将驱动轴连接到第二输出轴的第二离合器,并且此外还具有用于控制离合器的控制单元,其中驱动系统通过根据前述权利要求中的任一项所述的方法控制。控制单元特别地以用于实施该方法的合适方式实施和/或规定,或者相应地实施该方法。
[0043]
具有可变传动比的变速器可以设置在驱动单元和输出轴之间。可变传动比特别地意味着不存在单一的恒定传动比,而是传动比可以例如分阶段或连续地变化。
[0044]
替代的,在驱动单元和输出轴之间可以不设置变速器,或者设置具有单一固定传动比的变速器。
[0045]
特别地,用于传递扭矩的两个离合器设置在机动车辆的一个车轴上,使得通过致动第一离合器,车轴的第一车轮和通过致动第二离合器,机动车辆的同一车轴的第二车轮以扭矩传递方式连接到驱动单元。因此,离合器特别地不是机动车辆的设置在驱动单元和机动车辆的可换档变速器之间的离合器。
[0046]
特别地,车轴能够通过转向系统(例如,包括方向盘,例如可由驾驶员致动以便偏转车轴的车轮)来转向,该转向系统具有用于致动转向的转向驱动装置(例如,动力转向装置或类似装置)。从非偏转状态(例如,向前直行行驶)进行的转向系统可以偏转,使得存在大于零度角度的转向角。
[0047]
该方法也可以分别由计算机或控制单元的处理器来实施。
[0048]
因此,还提出了一种用于数据处理的系统(控制装置或相应地其一部分),该系统
包括处理器,该处理器被以这样的方式适配/配置成使得所述处理器执行该方法或相应地所提出的方法的部分步骤。
[0049]
可以提供一种计算机可读存储介质,其包括指令,当由计算机/处理器执行时,这些指令使得后者实施该方法或相应地所提出的方法的至少一些步骤。
[0050]
与该方法相关的解释特别地可以应用于机动车辆、系统、存储介质或计算机实施的方法,并且反之亦然。
[0051]
作为预防措施,应注意这里使用的数字(“第一”、“第二”,...)主要(仅)用于区分多个相同的对象、变量或过程,即特别地,不必预定义这些对象、变量或过程相对于彼此的任何依赖性和/或顺序。如果需要依赖性和/或顺序,这里明确进行陈述,或者对于本领域技术人员来说在研究具体描述的配置时是显而易见的。
附图说明
[0052]
下面将参照附图更详细地解释本发明以及技术领域。应指出的是,本发明不旨在受所示的示例性实施例的限制。特别地,除非另外明确声明,否则还可以提取附图中解释的实质性内容的部分方面,并且将它们与本说明书和/或附图中的其他组成部分和知识相结合。相同的附图标记表示相同的对象,并且因此在适当的情况下,可以以补充的方式使用来自其他附图的适当解释。在附图中,分别示意性地:图1示出了具有驱动系统的机动车辆,该驱动系统用于分别驱动机动车辆的一个车轮;图2示出了另外的机动车辆;图3示出了根据图2的机动车辆的车轴,该车轴用第一控制策略控制;图4示出了根据图3的车轴,该车轴用第三控制策略控制;和图5示出了根据图3的车轴,该车轴用第二控制策略控制;以及图6示出了用第三控制策略控制的从动和可转向车轴。
具体实施方式
[0053]
图1示出了机动车辆3,其具有用于驱动机动车辆3的公共车轴2的第一车轮16和第二车轮17的驱动系统1。驱动系统1包括驱动单元4、由驱动单元4驱动的驱动轴5、第一输出轴6和第二输出轴7,以及将驱动轴5连接到第一输出轴6的第一离合器8和将驱动轴5连接到第二输出轴7的第二离合器9。还提供了用于控制两个离合器8、9的控制单元10。
[0054]
这里,示出了驱动系统1,其中两个离合器8、9设置在机动车辆3的公共车轴2上,其中机动车辆3的一个车轮16、17分别通过两个离合器8、9中的一个以扭矩传递的方式连接到机动车辆3的驱动单元4。两个离合器8、9代替常见的差速器18(这里图示在机动车辆的另一车轴上),借助于该差速器可以补偿车轮的不同速度。
[0055]
变速器19设置在驱动单元4和输出轴6、7之间。
[0056]
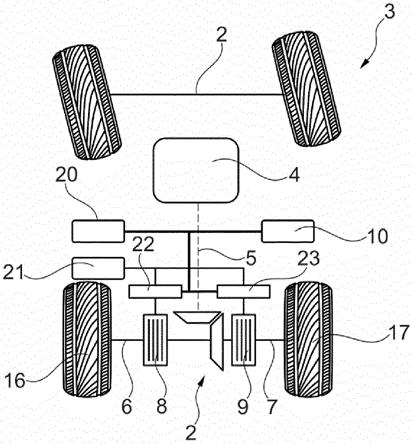
图2示出了另外的机动车辆3。参考关于图1的解释。这里,驱动单元4直接通过驱动轴5将扭矩传递到车轴2,或者通过第一离合器8将扭矩传递到第一输出轴6,并且通过第二离合器9将扭矩传递到第二输出轴7。第一离合器8通过第一阀22控制,并且第二离合器9通过第二阀23控制。阀22、23通过由泵马达20驱动的泵21以受控的方式被致动。
[0057]
图3示出了根据图2的机动车辆3的车轴2,所述车轴2用第一控制策略11控制。
[0058]
用于向前直行行驶状态的第一控制策略11包括用于第一离合器8和用于第二离合器9的相互独立的微滑移控制。这意味着每个离合器8、9被单独控制,特别地,例如(排他地)作为相应车轮16、17和路面之间的滑移的函数。
[0059]
图4示出了根据图3的车轴2,所述车轴2用第三控制策略13控制。参考关于图3的解释。
[0060]
用于在牵引模式行驶状态下转弯的第三控制策略13包括用于弯道外侧的离合器(这里是第二离合器9)的微滑移控制,其中弯道内侧的离合器(这里是第一离合器8)作为弯道外侧的(第二)离合器9的函数被控制,使得由弯道内侧的(第一)离合器8传递的第一扭矩对应于弯道外侧的(第二)离合器9的第二扭矩,所述第二扭矩已经改变了一个因子。转向系统15具有转向角14,使得可以确定弯道内侧的(第一)车轮16和弯道外侧的(第二)车轮17。
[0061]
图5示出了根据图3的车轴2,所述车轴2用第二控制策略12控制。参考关于图3和4的解释。
[0062]
用于在推进模式行驶状态下转弯的第二控制策略12包括用于弯道内侧的离合器(这里是第一离合器8)的微滑移控制,其中,弯道外侧的(第二)离合器9作为弯道内侧的离合器8的函数被控制,使得由弯道外侧的离合器9传递的第一扭矩对应于弯道内侧的离合器8的第二扭矩,所述第二扭矩已经改变了一个因子。
[0063]
在第二控制策略12和第三控制策略13中,一个离合器8、9分别通过微滑移控制(在图4和5中分别由虚线表示)来控制,其中相应的另一个离合器9、8作为由微滑移控制控制的该离合器8、9的函数来操作。
[0064]
图6示出了从动且可转向的车轴2,其用第三控制策略13控制。参考关于图4的解释。
[0065]
用于在牵引模式行驶状态下转弯的第三控制策略13包括微滑移控制。转向系统15具有转向角14,使得可以确定弯道内侧的(第一)车轮16和弯道外侧的(第二)车轮17。
[0066]
在当前情况下,车轴2可以通过转向系统15(例如包括方向盘,例如可由驾驶员激活以便偏转车轴2的车轮16、17)来转向,转向系统15具有用于激活转向系统15的转向驱动装置24(例如,动力转向或类似装置)。从非偏转状态(例如,向前直行或零度角度的转向角14)进行的转向系统15可以被偏转,使得存在大于零度角度的转向角14。
[0067]
当在牵引模式下转弯时,转向驱动装置24受到额外的恢复扭矩25(取决于转向车轴上的扭矩差)的冲击,以用于将转向系统15重置为向前直行行驶状态。
[0068]
附图标记列表1 驱动系统2 车轴3 机动车辆4 驱动单元5 驱动轴6 第一输出轴7 第二输出轴8 第一离合器9 第二离合器
10
ꢀꢀꢀꢀ
控制单元11
ꢀꢀꢀꢀ
第一控制策略12
ꢀꢀꢀꢀ
第二控制策略13
ꢀꢀꢀꢀ
第三控制策略14
ꢀꢀꢀꢀ
转向角15
ꢀꢀꢀꢀ
转向系统16
ꢀꢀꢀꢀ
第一车轮17
ꢀꢀꢀꢀ
第二车轮18
ꢀꢀꢀꢀ
差速器19
ꢀꢀꢀꢀ
变速器20
ꢀꢀꢀꢀ
泵马达21
ꢀꢀꢀꢀ
泵22
ꢀꢀꢀꢀ
第一阀23
ꢀꢀꢀꢀ
第二阀24
ꢀꢀꢀꢀ
转向驱动装置
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1