车辆尾灯自适应控制系统、方法和车辆与流程
[0001]
本发明涉及车灯控制技术领域,具体涉及一种车辆尾灯自适应控制系统、一种车辆和一种车辆尾灯自适应控制方法。
背景技术:
[0002]
目前,汽车已成为人们较为重要的交通工具之一,在人们的日常生活中占据着较为重要的地位,其安全性也越来越受到人们的重视。特别是近年来,汽车交通事故频发,使得人们对汽车的安全性更加重视。
[0003]
其中,部分汽车交通事故是因为汽车驾驶员滥用汽车远光灯而导致的,例如,在跟车行驶时,后车在近距离开启远光灯,导致前车的中央后视镜和左右后视镜反射强光,影响前车驾驶员的视线,从而造成汽车交通事故的发生。所以,在跟车行驶时,如果后车的远光灯影响到了前车驾驶员的正常驾驶,需要合适的方法来解决该问题。
[0004]
目前常采用的方法有两种,一种是通过轻点几下刹车来提醒后车驾驶员关闭远光灯,但该方式容易因为点刹车的力度过大而出现急刹,造成后车来不及减速而发生汽车交通事故;另一种是通过手动打开后视镜防眩目功能来避免后车远光灯的影响,但该方式需要驾驶员分神去手动开启,容易因为驾驶员分神而带来行车安全隐患。
技术实现要素:
[0005]
本发明旨在至少在一定程度上解决上述技术中的技术问题之一。为此,本发明的一个目的在于提出了一种车辆尾灯自适应控制系统,能够在行车过程中自动判断出车辆是否处于夜间行车环境且后方车辆近距离持续开启远光灯,并在车辆处于夜间行车环境且后方车辆近距离持续开启远光灯时自动控制车辆尾灯发出警示光,提醒后方车辆关闭远光灯或拉开跟车距离,从而能够避免车辆驾驶员因后方车辆近距离持续远光灯照射而产生刺目感,提高夜间行车的安全性。
[0006]
本发明的第二个目的在于提出了一种车辆。
[0007]
本发明的第三个目的在于提出了一种车辆尾灯自适应控制方法。
[0008]
为达到上述目的,本发明第一方面实施例提出了一种车辆尾灯自适应控制系统,包括:行车环境检测模块,所述行车环境检测模块用于检测车辆的行车环境信息;车辆状态检测模块,所述车辆状态检测模块用于检测所述车辆的行驶状态信息;车后跟车检测模块,所述车后跟车检测模块用于检测所述车辆后方的跟车车辆信息;车后亮度采集模块,所述车后亮度采集模块用于采集所述车辆后方光照的亮度信息;主控模块,所述主控模块分别与所述行车环境检测模块、所述车辆状态检测模块、所述车后跟车检测模块和所述车后亮度采集模块相连,并连接到所述车辆尾灯,所述主控模块用于在所述车辆处于夜间行车环境、处于行驶状态、后方预设距离内有跟车车辆且后方光照的亮度大于预设亮度阈值时,控制所述车辆尾灯发出警示光。
[0009]
根据本发明实施例的车辆尾灯自适应控制系统,通过行车环境检测模块、车辆状
态检测模块和车后跟车检测模块分别对应检测车辆的行车环境信息、行驶状态信息和车辆后方的跟车车辆信息,并通过车后亮度采集模块采集车辆后方光照的亮度信息,通过主控模块在车辆处于夜间行车环境、处于行驶状态、后方预设距离内有跟车车辆且后方光照的亮度大于预设亮度阈值时,控制车辆尾灯发出警示光,由此,能够在行车过程中自动判断出车辆是否处于夜间行车环境且后方车辆近距离持续开启远光灯,并在车辆处于夜间行车环境且后方车辆近距离持续开启远光灯时自动控制车辆尾灯发出警示光,提醒后方车辆关闭远光灯或拉开跟车距离,从而能够避免车辆驾驶员因后方车辆近距离持续远光灯照射而产生刺目感,提高夜间行车的安全性。
[0010]
另外,根据本发明上述实施例提出的车辆尾灯自适应控制系统还可以具有如下附加的技术特征:
[0011]
根据本发明的一个实施例,所述行车环境检测模块包括车辆gps(global positioning system,全球定位系统)系统,所述主控模块根据所述车辆gps系统获取的所述车辆的定位信息判断所述车辆是否处于夜间行车环境。
[0012]
根据本发明的一个实施例,所述车辆状态检测模块包括轮速传感器,所述主控模块根据所述轮速传感器获取的所述车辆的轮速判断所述车辆是否处于行驶状态。
[0013]
根据本发明的一个实施例,所述车后跟车检测模块包括摄像头,所述主控模块根据所述摄像头获取的所述车辆后方的图像判断所述车辆后方预设距离内是否有跟车车辆。
[0014]
根据本发明的一个实施例,所述车后亮度采集模块包括光敏传感器。
[0015]
根据本发明的一个实施例,所述主控模块通过向所述车辆尾灯输出pwm(pulse width modulation,脉冲宽度调制)信号以控制所述车辆尾灯的亮度或动态效果,实现对所述跟车车辆的警示。
[0016]
为实现上述目的,本发明第二方面实施例提出了一种车辆,包括第一方面实施例提出的车辆尾灯自适应控制系统。
[0017]
根据本发明实施例的车辆,通过采用上述实施例提出车辆尾灯自适应控制系统,能够在处于夜间行驶且后方车辆近距离持续开启远光灯时,自动控制尾灯发出警示光,以提醒后方车辆关闭远光灯或拉开跟车距离,从而能够提高安全性。
[0018]
为实现上述目的,本发明第三方面实施例提出了一种车辆尾灯自适应控制方法,包括:检测车辆的行车环境信息以判断所述车辆是否处于夜间行车环境;检测所述车辆的行驶状态信息以判断所述车辆是否处于行驶状态;检测所述车辆后方的跟车车辆信息以判断所述车辆后方预设距离内是否有跟车车辆;采集所述车辆后方光照的亮度信息以判断所述车辆后方光照的亮度是否大于预设亮度阈值;在所述车辆处于夜间行车环境、处于行驶状态、后方预设距离内有跟车车辆且后方光照的亮度大于预设亮度阈值时,控制所述车辆尾灯发出警示光。
[0019]
根据本发明实施例的车辆尾灯自适应控制方法,通过检测车辆的行车环境信息以判断车辆是否处于夜间行车环境,检测车辆的行驶状态信息以判断车辆是否处于行驶状态,检测车辆后方的跟车车辆信息以判断车辆后方预设距离内是否有跟车车辆,采集车辆后方光照的亮度信息以判断车辆后方光照的亮度是否大于预设亮度阈值,并通过在车辆处于夜间行车环境、处于行驶状态、后方预设距离内有跟车车辆且后方光照的亮度大于预设亮度阈值时,控制车辆尾灯发出警示光,由此,能够在行车过程中自动判断出车辆是否处于
夜间行车环境且后方车辆近距离持续开启远光灯,并在车辆处于夜间行车环境且后方车辆近距离持续开启远光灯时自动控制车辆尾灯发出警示光,提醒后方车辆关闭远光灯或拉开跟车距离,从而能够避免车辆驾驶员因后方车辆近距离持续远光灯照射而产生刺目感,提高夜间行车的安全性。
[0020]
另外,根据本发明上述实施例提出的车辆尾灯自适应控制方法还可以具有如下附加的技术特征:
[0021]
根据本发明的一个实施例,根据所述车辆的定位信息判断所述车辆是否处于夜间行车环境,根据所述车辆的轮速判断所述车辆是否处于行驶状态,根据所述车辆后方的图像判断所述车辆后方预设距离内是否有跟车车辆。
[0022]
根据本发明的一个实施例,通过向所述车辆尾灯输出pwm信号以控制所述车辆尾灯的亮度或动态效果,实现对所述跟车车辆的警示。
附图说明
[0023]
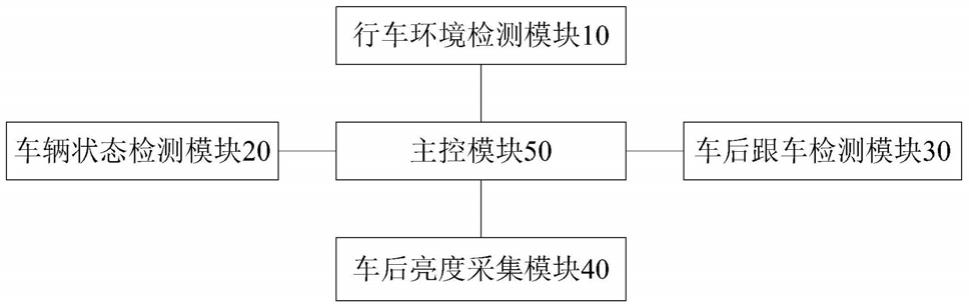
图1为本发明实施例的车辆尾灯自适应控制系统的方框示意图;
[0024]
图2为本发明一个实施例的车辆gps系统的原理图;
[0025]
图3为本发明实施例的车辆尾灯自适应控制方法的流程图。
具体实施方式
[0026]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0027]
图1为本发明实施例的车辆尾灯自适应控制系统的方框示意图。
[0028]
如图1所示,本发明实施例的车辆尾灯自适应控制系统,包括行车环境检测模块10、车辆状态检测模块20、车后跟车检测模块30、车后亮度采集模块40和主控模块50。其中,行车环境检测模块10用于检测车辆的行车环境信息;车辆状态检测模块20用于检测车辆的行驶状态信息;车后跟车检测模块30用于检测车辆后方的跟车车辆信息;车后亮度采集模块40用于采集车辆后方光照的亮度信息;主控模块50分别与行车环境检测模块10、车辆状态检测模块20、车后跟车检测模块30和车后亮度采集模块40相连,并连接到车辆尾灯,主控模块50用于在车辆处于夜间行车环境、处于行驶状态、后方预设距离内有跟车车辆且后方光照的亮度大于预设亮度阈值时,控制车辆尾灯发出警示光。
[0029]
在本发明的一个实施例中,参照图2,行车环境检测模块10可包括车辆gps系统,主控模块50可根据车辆gps系统获取的车辆的定位信息,即车辆当前位置的经纬度信息,判断当前位置的日落时间,并结合当前位置的时间判断车辆是否处于夜间行车环境。其中,车辆gps系统可通过lin(local interconnect network,局域互联网络)总线和主控模块50相连,并将检测的车辆的定位信息通过lin总线输入到主控模块50。
[0030]
在本发明的另一个实施例中,还可通过其他方式检测车辆的行车环境信息。例如,行车环境检测模块10可包括光传感器,主控模块50可根据光传感器采集的外部环境的光照强度信息,以判断车辆是否处于夜间行驶状态。
[0031]
在本发明的再一个实施例中,可在车辆行驶之前手动设置车辆自动进入夜间行车模式的时间,主控模块50可通过将当前时间与设置的时间进行比较,以判断车辆是否处于夜间行驶状态。
[0032]
在本发明的一个实施例中,车辆状态检测模块20可包括轮速传感器,主控模块50可根据轮速传感器获取的车辆的轮速判断车辆是否处于行驶状态。车辆状态检测模块20还可包括轮速处理器,轮速处理器可用于对轮速传感器检测的车辆的轮速信息进行采集和处理,并可通过lin总线和主控制模块50相连,将处理后的车辆的轮速信息输入到主控模块50,主控模块50可通过处理后的车辆的轮速信息判断车辆是否处于行驶状态。
[0033]
在本发明的另一个实施例中,还可通过其他方式检测车辆的行驶状态信息。例如,车辆状态检测模块20可包括车速传感器,主控模块50可根据车速传感器获取的车辆的速度判断车辆是否处于行驶状态。
[0034]
在本发明的一个实施例中,车后跟车检测模块30可包括摄像头,主控模块50可根据摄像头获取的车辆后方的图像判断车辆后方预设距离内是否有跟车车辆。其中,预设距离可为当后方车辆远光灯的光照将要对前方车辆造成炫目影响时,两车之间的距离。车后跟车检测模块30还可包括图像处理器,图像处理器可用于对摄像头拍摄的图案进行采集和处理,提取出图案中的跟车车辆信息,即跟车车辆的位置信息,并可通过lin总线和主控制模块50相连,将提取出的跟车车辆信息输入到主控模块50,主控模块50可根据输入的跟车车辆信息判断车辆后方预设距离内是否有跟车车辆。
[0035]
在本发明的一个实施例中,车后亮度采集模块40可包括光敏传感器,主控模块50可根据光敏传感器采集车辆后方光照的亮度信息以判断车辆后方光照的亮度是否大于预设亮度阈值。其中,光敏传感器可通过lin总线和主控模块50相连,并通过lin总线将采集的车辆后方光照的亮度信息输入到主控模块50。
[0036]
在本发明的一个实施例中,当主控模块50根据输入的信息判断车辆处于夜间行车环境、处于行驶状态、后方预设距离内有跟车车辆且后方光照的亮度大于预设亮度阈值时,主控模块50可通过向车辆尾灯输出pwm信号以控制车辆尾灯的亮度或动态效果。具体地,主控模块50可通过向车辆尾灯的驱动控制器输入pwm信号,驱动控制器对输入的pwm信号进行处理,通过处理后的pwm信号控制车辆尾灯的亮度或动态效果,实现对跟车车辆的警示。
[0037]
根本发明实施例提出的车辆尾灯自适应控制系统,通过行车环境检测模块、车辆状态检测模块和车后跟车检测模块分别对应用于检测车辆的行车环境信息、行驶状态信息和车辆后方的跟车车辆信息,并通过车后亮度采集模块采集车辆后方光照的亮度信息,通过主控模块在车辆处于夜间行车环境、处于行驶状态、后方预设距离内有跟车车辆且后方光照的亮度大于预设亮度阈值时,控制车辆尾灯发出警示光,由此,能够在行车过程中自动判断出车辆是否处于夜间行车环境且后方车辆近距离持续开启远光灯,并在车辆处于夜间行车环境且后方车辆近距离持续开启远光灯时自动控制车辆尾灯发出警示光,提醒后方车辆关闭远光灯或拉开跟车距离,从而能够避免车辆驾驶员因后方车辆近距离持续远光灯照射而产生刺目感,提高夜间行车的安全性。
[0038]
对应上述实施例,本发明还提出了一种车辆。
[0039]
本发明实施例提出的车辆,包括上述实施例提出的车辆尾灯自适应控制系统,其具体实施方式可参照上述实施例。
[0040]
根据本发明实施例提出的车辆,通过采用上述实施例提出车辆尾灯自适应控制系统,能够在车辆处于夜间行驶且后方车辆近距离持续开启远光灯时,自动控制车辆尾灯发出警示光,以提醒后方车辆关闭远光灯或拉开跟车距离,从而能够提高安全性。
[0041]
对应上述实施例提出的车辆尾灯自适应控制系统,本发明还提出了一种车辆尾灯自适应控制方法。
[0042]
如图2所示,本发明实施例的车辆尾灯自适应控制方法,包括:
[0043]
s1,检测车辆的行车环境信息以判断车辆是否处于夜间行车环境。
[0044]
在本发明的一个实施例中,可采用车辆gps系统检测车辆的行车环境信息,例如定位信息,即车辆当前位置的经纬度信息,判断当前位置的日落时间,并结合当前位置的时间判断车辆是否处于夜间行车环境。
[0045]
在本发明的另一个实施例中,可采用光传感器检测车辆的行车环境信息,例如外部环境的光照强度信息,以判断车辆是否处于夜间行车环境。
[0046]
s2,检测车辆的行驶状态信息以判断车辆是否处于行驶状态。
[0047]
在本发明的一个实施例中,可采用轮速传感器检测车辆的行驶状态信息,例如车辆的轮速信息判断车辆是否处于行驶状态。
[0048]
在本发明的另一个实施例中,可采用车速传感器检测车辆的行驶状态信息,例如车辆的速度信息判断车辆是否处于行驶状态。
[0049]
s3,检测车辆后方的跟车车辆信息以判断车辆后方预设距离内是否有跟车车辆。
[0050]
在本发明的一个实施例中,可采用摄像头拍摄车辆后方的图像,根据摄像头拍摄的车辆后方的图像判断车辆后方预设距离内是否有跟车车辆。具体地,可采用图像处理器对摄像头拍摄的图案进行采集和处理,提取出图案中的跟车车辆信息,即跟车车辆的位置信息,根据跟车车辆的位置信息判断车辆后方预设距离内是否有跟车车辆。其中,预设距离可为当后方车辆远光灯的光照将要对前方车辆造成炫目影响时,两车之间的距离。
[0051]
s4,采集车辆后方光照的亮度信息以判断车辆后方光照的亮度是否大于预设亮度阈值。
[0052]
在本发明的一个实施例中,可采用光敏传感器采集车辆后方光照的亮度信息以判断车辆后方光照的亮度是否大于预设亮度阈值。
[0053]
s5,在车辆处于夜间行车环境、处于行驶状态、后方预设距离内有跟车车辆且后方光照的亮度大于预设亮度阈值时,控制车辆尾灯发出警示光。
[0054]
在本发明的一个实施例中,可通过向车辆尾灯输出pwm信号以控制车辆尾灯的亮度或动态效果,实现对跟车车辆的警示。具体地,可通过向车辆尾灯的驱动控制器输入pwm信号,驱动控制器对输入的pwm信号进行处理,通过处理后的pwm信号控制车辆尾灯的亮度或动态效果,实现对跟车车辆的警示。
[0055]
根据本发明实施例提出的车辆尾灯自适应控制方法,通过检测车辆的行车环境信息以判断车辆是否处于夜间行车环境,检测车辆的行驶状态信息以判断车辆是否处于行驶状态,检测车辆后方的跟车车辆信息以判断车辆后方预设距离内是否有跟车车辆,采集车辆后方光照的亮度信息以判断车辆后方光照的亮度是否大于预设亮度阈值,并通过在车辆处于夜间行车环境、处于行驶状态、后方预设距离内有跟车车辆且后方光照的亮度大于预设亮度阈值时,控制车辆尾灯发出警示光,由此,能够在行车过程中自动判断出车辆是否处
于夜间行车环境且后方车辆近距离持续开启远光灯,并在车辆处于夜间行车环境且后方车辆近距离持续开启远光灯时自动控制车辆尾灯发出警示光,提醒后方车辆关闭远光灯或拉开跟车距离,从而能够避免车辆驾驶员因后方车辆近距离持续远光灯照射而产生刺目感,提高夜间行车的安全性。
[0056]
在本说明书的描述中,“相连”、“连接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0057]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0058]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1