清洁机的制作方法
[0001]
本公开涉及车体清洁技术领域,尤其涉及一种清洁机。
背景技术:
[0002]
现阶段,智能引导运输车(agv)是无人仓储中实现自动化搬运、分拣等功能的重要设备之一。伴随经济水平全面提升,人工成本大幅增加,为了去人工成本,agv的全生命周期的智能化管理变得尤为关键。在实际应用中,agv在仓库运行一段时间后外观脏污,容易对设备的零部件造成腐蚀损毁,同时影响美观,现有技术中外观清洁全靠人工擦拭,既浪费人力,用工成本较高,且工作效率也较低。
技术实现要素:
[0003]
本公开的一个主要目的在于克服上述现有技术的至少一种缺陷,提供一种清洁机。
[0004]
本发明提供了一种清洁机,包括:
[0005]
机架,机架包括用于供车体通过的清洁通道;
[0006]
第一清洁件,第一清洁件设置在机架上,第一清洁件包括悬臂和设置在悬臂上的第一清洁部;
[0007]
其中,悬臂可转动地设置在机架上,以在车体停止在清洁通道内的预设位置时,悬臂带动第一清洁部环绕车体的周向外表面转动,并使第一清洁部用于清洁车体的头部和尾部中的至少之一。
[0008]
在本发明的一个实施例中,第一清洁部可转动地设置在悬臂上,以使第一清洁部的周向外表面均可用于清洁车体。
[0009]
在本发明的一个实施例中,第一清洁件还包括:
[0010]
中心齿轮,中心齿轮设置在机架上;
[0011]
连接轴,连接轴设置在悬臂上,第一清洁部可转动地设置在连接轴上;
[0012]
驱动齿轮,驱动齿轮可转动地设置在连接轴上,且与第一清洁部相连接;
[0013]
其中,驱动齿轮与中心齿轮相啮合,悬臂的轴线与中心齿轮的中心线相重合。
[0014]
在本发明的一个实施例中,悬臂和中心齿轮均位于清洁通道的上方,第一清洁部与车体的侧部间隔设置,以在车体沿清洁通道移动时,防止第一清洁部与车体的侧部相接触。
[0015]
在本发明的一个实施例中,第一清洁部为多个,悬臂包括:
[0016]
连接段,连接段可转动地设置在机架上;
[0017]
旋转段,旋转段成对设置,成对设置的两个旋转段相对地连接在连接段的两侧;
[0018]
其中,两个旋转段上均设置有第一清洁部,两个旋转段上的第一清洁部之间具有供车体通过的间隙。
[0019]
在本发明的一个实施例中,旋转段上设置有多个第一清洁部,多个第一清洁部的
中心线与悬臂的轴线之间的距离均相等。
[0020]
在本发明的一个实施例中,清洁机还包括:
[0021]
第二清洁件,第二清洁件设置在机架上,第二清洁件包括第二清洁部,第二清洁部位于清洁通道的侧方,以在车体沿清洁通道移动时,第二清洁部用于清洁车体的侧部。
[0022]
在本发明的一个实施例中,第二清洁部为多个,清洁通道的两侧均设置有第二清洁部。
[0023]
在本发明的一个实施例中,第二清洁部可转动地设置在机架上,以使第二清洁部的周向外表面均可用于清洁车体。
[0024]
在本发明的一个实施例中,多个第二清洁部均同步可转动地设置在机架上。
[0025]
在本发明的一个实施例中,第二清洁部为第二滚筒刷,第二清洁件还包括:
[0026]
多个第一传动轮,多个第一传动轮中的至少部分与多个第二清洁部一一对应地相连接;
[0027]
第一传动件,第一传动件套设在相邻两个第一传动轮上,第一传动件为多个,以使多个第一传动轮均传动连接;
[0028]
第二驱动电机,第二驱动电机与多个第一传动轮中的一个驱动连接。
[0029]
在本发明的一个实施例中,清洁机还包括:
[0030]
第三清洁件,第三清洁件设置在机架上,且与第一清洁件间隔设置,第三清洁件包括第三清洁部,第三清洁部位于清洁通道的上方,以在车体沿清洁通道移动时,第三清洁部用于清洁车体的上部。
[0031]
在本发明的一个实施例中,清洁机还包括:
[0032]
传送线,传送线设置在机架上,且位于清洁通道的下方,传送线用于驱动车体沿清洁通道移动;
[0033]
检测部,检测部设置在机架上,用于检测车体的位置信息;
[0034]
控制部,控制部与检测部和传送线均连接,以接收检测部获取的位置信息,并在确定车体到达预设位置时,控制传送线停止运行。
[0035]
在本发明的一个实施例中,传送线包括:
[0036]
滚轴,滚轴可转动地设置在机架上,滚轴为多个,多个滚轴沿清洁通道的延伸方向间隔设置;
[0037]
支撑轮,支撑轮为多个,多个滚轴上均设置有至少一个支撑轮,支撑轮用于支撑车体;
[0038]
多个第三传动轮,多个第三传动轮中的至少部分与多个滚轴一一对应地相连接;
[0039]
第三传动件,第三传动件套设在相邻两个第三传动轮上,第三传动件为多个,以使多个第三传动轮均传动连接;
[0040]
第四驱动电机,第四驱动电机与多个第三传动轮中的一个驱动连接。
[0041]
本发明的清洁机通过设置在机架上的第一清洁件可以实现对车体的自动化清洁。在具体清洁过程中,车体沿机架的清洁通道移动,且当车体停止在清洁通道内的预设位置时,即可转动悬臂实现第一清洁部对车体的头部和/或尾部的自动清洁,第一清洁部代替了人工清洁车体,一定程度上提供了车体的清洁效果。
附图说明
[0042]
通过结合附图考虑以下对本公开的优选实施方式的详细说明,本公开的各种目标.特征和优点将变得更加显而易见。附图仅为本公开的示范性图解,并非一定是按比例绘制。在附图中,同样的附图标记始终表示相同或类似的部件。其中:
[0043]
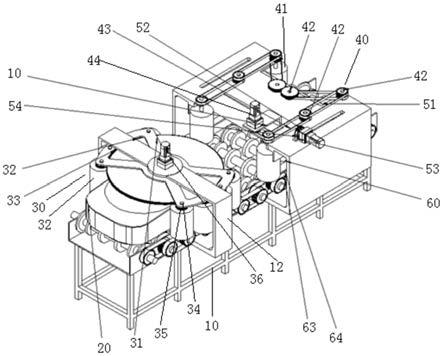
图1是根据一示例性实施方式示出的一种清洁机的第一个视角的结构示意图;
[0044]
图2是根据一示例性实施方式示出的一种清洁机的第二个视角的结构示意图;
[0045]
图3是根据一示例性实施方式示出的一种清洁机的第三个视角的结构示意图。
[0046]
附图标记说明如下:
[0047]
10、机架;11、清洁通道;12、连接支架;20、车体;30、第一清洁件;31、悬臂;311、连接段;312、旋转段;32、第一清洁部;33、中心齿轮;34、连接轴;35、驱动齿轮;36、第一驱动电机;40、第二清洁件;41、第二清洁部;42、第一传动轮;43、第一传动件;44、第二驱动电机;50、第三清洁件;51、第三清洁部;52、第二传动轮;53、第二传动件;54、第三驱动电机;60、传送线;61、滚轴;62、支撑轮;63、第三传动轮;64、第三传动件;65、第四驱动电机。
具体实施方式
[0048]
体现本公开特征与优点的典型实施例将在以下的说明中详细叙述。应理解的是本公开能够在不同的实施例上具有各种的变化,其皆不脱离本公开的范围,且其中的说明及附图在本质上是作说明之用,而非用以限制本公开。
[0049]
在对本公开的不同示例性实施方式的下面描述中,参照附图进行,附图形成本公开的一部分,并且其中以示例方式显示了可实现本公开的多个方面的不同示例性结构.系统和步骤。应理解的是,可以使用部件.结构.示例性装置.系统和步骤的其他特定方案,并且可在不偏离本公开范围的情况下进行结构和功能性修改。而且,虽然本说明书中可使用术语“之上”.“之间”.“之内”等来描述本公开的不同示例性特征和元件,但是这些术语用于本文中仅出于方便,例如根据附图中的示例的方向。本说明书中的任何内容都不应理解为需要结构的特定三维方向才落入本公开的范围内。
[0050]
本发明的一个实施例提供了一种清洁机,请参考图1至图3,清洁机包括:机架10,机架10包括用于供车体20通过的清洁通道11;第一清洁件30,第一清洁件30设置在机架10上,第一清洁件30包括悬臂31和设置在悬臂31上的第一清洁部32;其中,悬臂31可转动地设置在机架10上,以在车体20停止在清洁通道11内的预设位置时,悬臂31带动第一清洁部32环绕车体20的周向外表面转动,并使第一清洁部32用于清洁车体20的头部和尾部中的至少之一。
[0051]
本发明一个实施例的清洁机通过设置在机架10上的第一清洁件30可以实现对车体20的自动化清洁。在具体清洁过程中,车体20沿机架10的清洁通道11移动,且当车体20停止在清洁通道11内的预设位置时,即可转动悬臂31实现第一清洁部32对车体20的头部和/或尾部的自动清洁,第一清洁部32代替了人工清洁车体20,一定程度上提供了车体20的清洁效果,解决了现有技术中车体20清洁效率较低的问题。
[0052]
在一个实施例中,车体20可以是智能引导运输车(agv),也可以是其他类似车型。
[0053]
在一个实施例中,第一清洁部32可转动地设置在悬臂31上,以使第一清洁部32的周向外表面均可用于清洁车体20。在具体清洁过程中,第一清洁部32可转动,即第一清洁部
32在随悬臂31公转的过程中也可以实现自转,此清洁过程不仅能够提高清洁效率,而且有利于提高第一清洁部32的使用寿命。
[0054]
针对第一清洁件30的具体结构,如图1和图2所示,第一清洁件30还包括:中心齿轮33,中心齿轮33设置在机架10上;连接轴34,连接轴34设置在悬臂31上,第一清洁部32可转动地设置在连接轴34上;驱动齿轮35,驱动齿轮35可转动地设置在连接轴34上,且与第一清洁部32相连接;其中,驱动齿轮35与中心齿轮33相啮合,悬臂31的轴线与中心齿轮33的中心线相重合。
[0055]
在一个实施例中,悬臂31的轴线是指悬臂31绕其转动的直线。
[0056]
在一个实施例中,第一清洁件30由悬臂31、第一清洁部32、中心齿轮33、连接轴34、驱动齿轮35以及第一驱动电机36组成,中心齿轮33固定安装在机架10上,第一清洁部32、中心齿轮33以及连接轴34通过悬臂31悬挂在机架10上,在第一驱动电机36的驱动作用下,悬臂31绕中心齿轮33的中心线转动,此时,由于驱动齿轮35与中心齿轮33相互啮合,故驱动齿轮35会绕连接轴34转动,从而带动与其连接的第一清洁部32转动,整个清洁过程中,驱动齿轮35环绕中心齿轮33转动,从而带动第一清洁部32环绕车体20转动。
[0057]
在一个实施例中,中心齿轮33也可以相对机架10转动,即需要通过其他的驱动电机进行驱动,在其转动过程中,可以结合悬臂31的转动,进而调节驱动齿轮35的转动速率。
[0058]
在一个实施例中,悬臂31和中心齿轮33均位于清洁通道11的上方,第一清洁部32与车体20的侧部间隔设置,以在车体20沿清洁通道11移动时,防止第一清洁部32与车体20的侧部相接触。第一清洁部32的初始状态分布在车体20的侧面,即可以理解为车体20的宽度方向,其与车体20间隔设置,保证车体20可以正常通过,当需要清洁车体20时,悬臂31带动第一清洁部32转动,从而实现对车体20的头部以及尾部的清洁,此设计原理主要是根据车体20的长度要大于宽度。
[0059]
在一个实施例中,为了能够使得第一清洁部32实现对车体20的头部以及尾部的清洁,当车体20位于预设位置时,悬臂31的转轴位于车体20的中间位置,即其距离车体20的头部以及尾部的距离大致相等。由于第一清洁部32本身也是毛刷机构,故可以使其通过一个的变形量来填补距离误差,从而保证可以对车体20的头部以及尾部进行清洁。
[0060]
如图2所示,第一清洁部32为多个,悬臂31包括:连接段311,连接段311可转动地设置在机架10上;旋转段312,旋转段312成对设置,成对设置的两个旋转段312相对地连接在连接段311的两侧;其中,两个旋转段312上均设置有第一清洁部32,两个旋转段312上的第一清洁部32之间具有供车体20通过的间隙。
[0061]
在一个实施例中,两个旋转段312上的第一清洁部32相对设置,即其在初始状态时位于车体20的两侧,在清洁过程中,同步清洁车体20的头部和尾部。
[0062]
在一个实施例中,旋转段312上设置有多个第一清洁部32,多个第一清洁部32的中心线与悬臂31的轴线之间的距离均相等。旋转段312为一个扇形结构,其小端连接连接段311,大端上设置有多个第一清洁部32。
[0063]
在一个实施例中,机架10具有连接支架12,悬臂31、中心齿轮33以及第一驱动电机36均安装在连接支架12上。
[0064]
如图1和图2所示,清洁机还包括:第二清洁件40,第二清洁件40设置在机架10上,第二清洁件40包括第二清洁部41,第二清洁部41位于清洁通道11的侧方,以在车体20沿清
洁通道11移动时,第二清洁部41用于清洁车体20的侧部。
[0065]
在一个实施例中,第二清洁件40的设置主要是对车体20的侧部进行清洁,在车体20移动过程中,第二清洁部41对车体20的侧部进行清洁,其结合第一清洁件30可以完成对车体20的周向方向的清洁。
[0066]
在一个实施例中,第二清洁部41对车体20清洁时,车体20可以是一直处于移动状态,但也不排除车体20停止到某个位置,第二清洁部41针对性的对某个部位进行清洁。
[0067]
在一个实施例中,第二清洁部41为多个,清洁通道11的两侧均设置有第二清洁部41。为了提高清洁效率,故在清洁通道11的两侧均设置有第二清洁部41,从而在车体通过的过程中同步完成对车体20两侧的清洁。
[0068]
在一个实施例中,第二清洁部41可转动地设置在机架10上,以使第二清洁部41的周向外表面均可用于清洁车体20。在清洁车体20的过程中,第二清洁部41可以一直处于转动状态,但也不排除其可以间歇转动。
[0069]
在一个实施例中,第二清洁部41相对于车体20的转动方向是与车体20的移动方向相反的,即第二清洁部41给车体20一个反方向的摩擦力。
[0070]
在一个实施例中,多个第二清洁部41均同步可转动地设置在机架10上。沿清洁通道11的长度方向,即车体20的移动方向,可以间隔设置有多个第二清洁部41,在车体20移动过程中,对车体20进行长时间的清洁。
[0071]
在一个实施例中,第一清洁件30和第二清洁件40是间隔设置的,即二者对于车体20的清洁可以是分段清洁的,可以先第二清洁件40清洁,然后第一清洁件30清洁。
[0072]
在一个实施例中,清洁通道11的长度方向可以从头到尾均设在有第二清洁部41,即其会与第一清洁部32出现相邻的状态,在此设计中只要保证第二清洁部41与第一清洁部32不出现干涉即可,毕竟车体20的长度和宽度还是具有一定的差值。
[0073]
如图1和图2所示,第二清洁部41为第二滚筒刷,第二清洁件40还包括:多个第一传动轮42,多个第一传动轮42中的至少部分与多个第二清洁部41一一对应地相连接;第一传动件43,第一传动件43套设在相邻两个第一传动轮42上,第一传动件43为多个,以使多个第一传动轮42均传动连接;第二驱动电机44,第二驱动电机44与多个第一传动轮42中的一个驱动连接。
[0074]
在一个实施例中,第二清洁件40由多个第二清洁部41、多个第一传动轮42、多个第一传动件43以及第二驱动电机44组成,其中,多个第一传动轮42和多个第一传动件43实现了将多个第二清洁部41传动连接,即第二驱动电机44驱动其中一个第一传动轮42就可以实现所有第二清洁部41的同步转动。
[0075]
在一个实施例中,第一传动件43可以是同步带,而第一传动轮42可以全部都是同步带轮。当然,第一传动轮42也可以是由同步带轮和齿轮组成而成,通过齿轮组的设置可以使得整个结构布局更加紧凑有利于提高空间利用率。
[0076]
在一个实施例中,第一传动件43可以是链条,而第一传动轮42可以是链轮,只需保证传动即可。
[0077]
如图1和图2所示,清洁机还包括:第三清洁件50,第三清洁件50设置在机架10上,且与第一清洁件30间隔设置,第三清洁件50包括第三清洁部51,第三清洁部51位于清洁通道11的上方,以在车体20沿清洁通道11移动时,第三清洁部51用于清洁车体20的上部。
[0078]
在一个实施例中,第三清洁件50主要用于清洁车体20的上方,即车体20的顶部,其与第一清洁件30间隔设置,防止二者出现干涉。
[0079]
在一个实施例中,第二清洁件40和第三清洁件50位于同一个工位,即车体20在移动过程中,第二清洁件40和第三清洁件50同时清洁车体的侧部和顶部。而第一清洁件30位于另外一个工位,即整个清洁过程可以分为两个过程,至于清洁的前后顺序可以不做限定。
[0080]
在一个实施例中,第三清洁部51为多个,多个第三清洁部51间隔地设置在清洁通道11的上方。多个第三清洁部51的设置也是为了提高对车体20的清洁效率以及清洁度。
[0081]
在一个实施例中,第三清洁部51可转动地设置在机架10上,以使第三清洁部51的周向外表面均可用于清洁车体20。在清洁车体20的过程中,第三清洁部51可以一直处于转动状态,但也不排除其可以间歇转动。
[0082]
在一个实施例中,第三清洁部51相对于车体20的转动方向是与车体20的移动方向相反的,即第三清洁部51给车体20一个反方向的摩擦力。
[0083]
在一个实施例中,多个第三清洁部51沿清洁通道11的延伸方向间隔设置。
[0084]
在一个实施例中,多个第三清洁部51均同步可转动地设置在机架10上。沿清洁通道11的长度方向,即车体20的移动方向,可以间隔设置有多个第三清洁部51,在车体20移动过程中,对车体20的顶部进行长时间的清洁。
[0085]
如图1所示,第三清洁部51为第三滚筒刷,第三清洁件50还包括:多个第二传动轮52,多个第二传动轮52中的至少部分与多个第三清洁部51一一对应地相连接;第二传动件53,第二传动件53套设在相邻两个第二传动轮52上,以使多个第二传动轮52均传动连接;第三驱动电机54,第三驱动电机54与多个第二传动轮52中的一个驱动连接。
[0086]
在一个实施例中,第三清洁件50由多个第三清洁部51、多个第二传动轮52、第二传动件53以及第三驱动电机54组成,其中,多个第二传动轮52和第二传动件53实现了将多个第三清洁部51传动连接,即第三驱动电机54驱动其中一个第二传动轮52就可以实现所有第三清洁部51的同步转动。
[0087]
在一个实施例中,第二传动件53的数量根据第二传动轮52的数量而定,只要保证可以将所有的第二传动件53均传动连接即可。
[0088]
在一个实施例中,第二传动轮52可以是同步带,而第二传动件53可以是同步带轮。
[0089]
在一个实施例中,第二传动轮52可以是链条,而第二传动件53可以是链轮,只需保证传动即可。
[0090]
如图1所示,清洁机还包括:传送线60,传送线60设置在机架10上,且位于清洁通道11的下方,传送线60用于驱动车体20沿清洁通道11移动;检测部,检测部设置在机架10上,用于检测车体20的位置信息;控制部,控制部与检测部和传送线60均连接,以接收检测部获取的位置信息,并在确定车体20到达预设位置时,控制传送线60停止运行。
[0091]
在一个实施例中,传送线60主要是用于驱动车体20进行移动,即不需要车体20本身进行移动,考虑到第一清洁件30对于车体20的清洁需要控制车体20的位置,故需要对车体20的位置信息进行检测,从而保证车体20可以停止在合适的位置。而检测部和控制部的结合可以满足需求,例如检测部可以直接安装在机架10的中部,当车体20到达预设位置时,将信息传递至控制部,从而使得控制部直接控制传送线60停止运行。当然,也可以将检测部安装到机架10的端部,即在车体20进入时就可以判断,然后通过传送线60的数送速率确定
何时可以到达预设位置,移动时间确定后即可控制车体20停止移动,然后第一清洁件30开始清洁。
[0092]
在一个实施例中,检测部可以是接近开关也可以是红外检测器等。
[0093]
针对传送线60的具体结构,如图2和图3所示,传送线60包括:滚轴61,滚轴61可转动地设置在机架10上,滚轴61为多个,多个滚轴61沿清洁通道11的延伸方向间隔设置;支撑轮62,支撑轮62为多个,多个滚轴61上均设置有至少一个支撑轮62,支撑轮62用于支撑车体20;多个第三传动轮63,多个第三传动轮63中的至少部分与多个滚轴61一一对应地相连接;第三传动件64,第三传动件64套设在相邻两个第三传动轮63上,第三传动件64为多个,以使多个第三传动轮63均传动连接;第四驱动电机65,第四驱动电机65与多个第三传动轮63中的一个驱动连接。
[0094]
在一个实施例中,车体20支撑在多个滚轴61的多个支撑轮62上,通过滚轴61的转动驱动车体20沿清洁通道11的延伸方向移动,车体20的车轮与滚轴61与支撑轮62均不接触。
[0095]
在一个实施例中,一个第四驱动电机65向多个滚轴61提供动力,其主要是通过多个第三传动轮63和多个第三传动件64实现了传动连接。其中,第四驱动电机65可以是伺服电机。
[0096]
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本发明旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和示例实施方式仅被视为示例性的,本发明的真正范围和精神由下面的权利要求指出。
[0097]
应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1