输入轴和输出轴之间具有变化的距离的用于传递旋转动力的设备和方法及其使用方法与流程
输入轴和输出轴之间具有变化的距离的用于传递旋转动力的设备和方法及其使用方法
[0001]
发明背景
[0002]
用于在输入轴和输出轴之间传递旋转动力的机械齿轮通常用于以下目的中的一个或更多个:设定期望的传递比;改变输入轴线和输出轴线的空间方位之间的轴的相对方位、位置和方向(例如,90度螺旋齿轮);提供具有一个动力传递方向的动力传动装置(例如,90度螺旋齿轮),等等。在所有这些应用中,输入轴线和输出轴线之间的距离和方向是固定的。
[0003]
参考图1a和图1b,它们是平行齿轮箱10的示意图,其中输入轴12和输出轴14具有1∶n的传递比。在齿轮箱10中,轴线12和14是平行的,并且相关的旋转方向可以相似或相反,这取决于齿轮箱的具体布局。在齿轮箱20中,输入轴22和输出轴24以相互垂直的方式定向。
[0004]
需要齿轮能够以有效且即时的方式以期望的传递比将动力从输入轴传递到输出轴。
[0005]
发明概述
[0006]
提供了能够以有效且即时的方式以期望的传递比将动力从输入轴传递到输出轴的齿轮。传递与它们之间的距离和角度无关,并且能够根据它们的预期用途以瞬时方式改变,同时保持紧凑和狭小的尺寸,允许尽可能多的设计自由。例如,当齿轮驱动某种装置时,有时需要在输入(旋转动力源,如马达)和旋转动力负载(如轮)之间实现足够的运动(在位移和角度两方面上),以使系统的运动学性质具有实现其目的所需的自由度,例如,允许悬挂的轮跟随其滚动的道路/轨道的变化曲率。
[0007]
公开了一种用于动力传输的设备和方法,其允许多维度的、角度不可知的、高扭矩和高速旋转运动的位移和传递,同时保持最大效率和快速响应,以用于各种目的或交通工具。
[0008]
在以下描述中,描述了包括至少两个元件的传动齿轮箱。每个这样的元件是子传动齿轮箱,其包括至少两个彼此啮合的齿轮。所有这些元件都通过公共轴相互连接,该公共轴允许这些元件围绕该轴旋转,并由此改变它们的相对角度。此外,这些元件彼此接合,使得一个齿轮的旋转运动引起另一个齿轮旋转。每个这样的元件在下文中被称为铰接连杆,或简称为连杆。
[0009]
根据一些实施例,公开了一种传动齿轮,其包括多连杆铰接齿轮(mlag)中的至少两个连杆,每个连杆包括至少两个齿轮,所述至少两个齿轮被构造成将旋转从一个齿轮传递到另一个齿轮并自由旋转,其中mlag中的第一连杆中的第一齿轮适于由旋转动力源(该旋转动力源是提供给输入轴的)提供动力,并且第二齿轮适于旋转,或者用作来自至少两个连杆的第二连杆的第一齿轮。传动齿轮还包括公共轴线,该公共轴线适于允许连杆围绕公共轴线自由地旋转,并因此允许改变该至少两个连杆之间的角度,并且从而改变输入轴和输出轴之间的距离。
[0010]
根据一些实施例,第一连杆的齿轮和第二连杆的齿轮位于基本上相同的平面内。
[0011]
根据一些实施例,第一连杆的齿轮位于与第二连杆的齿轮的平面基本上平行的平
面内,并从该平面移位。根据一些实施例,第一连杆的第二齿轮和第二连杆的第一齿轮构造成一起在公共轴线上旋转。
[0012]
根据一些实施例,第一连杆的第二齿轮是所述第二连杆的第一齿轮。
[0013]
根据一些实施例,传动齿轮还包括至少一个附加连杆。
[0014]
根据一些实施例,传动齿轮还包括至少一个附加连杆,该至少一个附加连杆中的每一个包括适于自由地旋转的一个或两个齿轮,其中给定连杆的第一齿轮适于由来自一个或更多个连杆的前一个或后一个连杆的第二齿轮旋转,并且其中每个所述连杆适于与相邻连杆围绕公共轴线旋转。
[0015]
公开了一种轮驱动机构,其包括如上所述的传动齿轮、联接到第一铰接连杆的第一齿轮的旋转动力源、联接到第二铰接连杆的第二齿轮的轮、以及联接在第一铰接连杆和第二铰接连杆之间的悬架机构,以在旋转动力源和轮之间提供悬架(suspension)。
[0016]
公开了一种轮驱动机构,其包括根据如上所述的多铰接连杆的传动齿轮,还包括联接到第一铰接连杆的第一齿轮的旋转动力源、联接到第二铰接连杆的第二齿轮的轮、以及联接在第一铰接连杆和第二铰接连杆之间的悬架机构,以在旋转动力源和轮之间提供悬架。
[0017]
根据一些实施例,公开了一种用于最小化总扭矩的方法,所述总扭矩为当在多齿轮传动齿轮箱的输入轴处提供动力时,施加在所述多齿轮传动齿轮箱上的总扭矩。该方法包括向包括至少三个齿轮的多齿轮传动齿轮箱中的第一齿轮提供旋转动力,齿轮被布置成将所述旋转动力从所述第一齿轮传递到第二齿轮,并从第二齿轮传递到第三齿轮,使得所有奇数号的齿轮沿相同方向转动,并且将输出齿轮设定为从第一齿轮起算的奇数号的齿轮(odd-numbered gear)。在一些实施例中,输出齿轮是从第一齿轮起算的第三齿轮、第五齿轮或第七齿轮中的一个。
附图说明
[0018]
被看作本发明的主题被特别地指出并且在说明书的结论部分中被清楚地要求保护。然而,当与附图一起被阅读时,本发明关于机构和操作方法两者,连同其目的、特征和优点可参考下面的详细描述被最好地理解,其中:
[0019]
图1a和图1b是现有技术中已知的两种类型的传动齿轮箱的示意图;
[0020]
图2a描绘了根据本发明的一些实施例的具有两个铰接连杆的传动齿轮箱的示意图;
[0021]
图2b描绘了根据本发明的一些实施例的传动齿轮箱的正视图和两个俯视图;
[0022]
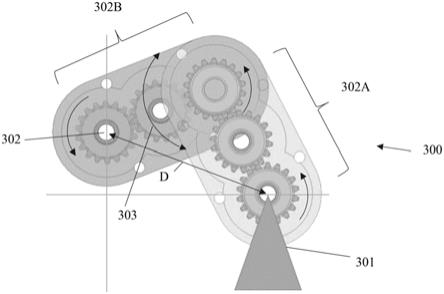
图3a和图3b分别描绘了根据本发明的实施例的传动齿轮箱的侧视图和等距视图;
[0023]
图4a和图4b描绘了根据本发明的实施例的另一种类型的传动齿轮箱的侧视图和等距视图;
[0024]
图5描绘了根据本发明的实施例的具有传动比为1∶n(n≠1或n=1)的传动齿轮箱;
[0025]
图6描绘了根据本发明的实施例的具有传动比为1∶n(n≠1或n=1)的附加传动齿轮箱;
[0026]
图7描绘了根据本发明的实施例的具有多个输出的传动齿轮箱;
[0027]
图8描绘了根据本发明的实施例的具有多级减速的传动齿轮箱;
mlag共用一个公共轴线,该公共轴线既用作公共齿轮的旋转轴线,又用作改变两个相邻l-mlag之间的相对角度的轴线。
[0043]
参考图2a,其描绘了根据本发明的一些实施例的具有两个铰接连杆(l-mlag)的多连杆铰接齿轮箱(mlag)200的示意图。mlag 200包括第一l-mlag 202a和第二l-mlag 202b。第一l-mlag 202a包括外齿轮204a和内齿轮204b。第二l-mlag 202b包括外齿轮204c和相同的内齿轮204b。由于三个齿轮相互啮合,当齿轮204a被提供动力(转动或旋转)时,如其相应的箭头所示,它导致齿轮204b和204c与其一起旋转,每个齿轮绕其相应的轴线旋转,而相应的l-mlag可以保持静止或独立地移动。l-mlag 202a和l-mlag 202b共用公共轴线208,该公共轴线也是齿轮204b的旋转轴线。通过公共轴线208连接l-mlag 202a和l-mlag 202b,使得它们的相对角度210可以通过绕轴线208旋转任一个l-mlag来改变。如图2a所示,轴线208可允许齿轮204b独立于l-mlag 202a或l-mlag 202b绕轴线208的旋转而旋转。因此,旋转动力可以被提供给例如输入齿轮204a且可以被连续地传递给输出齿轮204c,并且l-mlag 202a和l-mlag 202b之间的相对角度可以独立于齿轮的旋转而改变。结果,旋转动力可以从输入齿轮204a传递到输出齿轮204c,同时它们的轴线之间的距离可以通过改变l-mlag 202a和l-mlag 202b之间的相对角度而改变,而与齿轮的旋转无关。应该理解的是,一个l-mlag相对于相邻l-mlag可以绕公共轴线旋转的方式也适用于该l-mlag相对于参考框架可以绕连接到参考框架的轴线而旋转的方式。
[0044]
现在参考图2b,其描绘了根据本发明的一些实施例的mlag 250的正视图和两个俯视图。基本上,mlag 250的操作类似于图2a的mlag 200的操作,然而它的l-mlag 252a和l-mlag 252b的每一个都包括三个齿轮,其中一个齿轮对于两个l-mlag是公共的。如箭头260所示,l-mlag 252b可以改变其相对于l-mlag 252a的角度。
[0045]
图2b的俯视图-1和俯视图-2举例说明了mlag 250的两个不同的可选实施例。在俯视图-1中,mlag 250的所有齿轮被组装并允许在基本上公共的平面中旋转。在俯视图-2中,l-mlag 252a的齿轮在一个平面内旋转,并且l-mlag 252b的齿轮在基本上平行于l-mlag 252a的平面的不同平面内旋转。在俯视图-2所示的实施例中,l-mlag 252a和l-mlag 252b不共用一个公共齿轮,但是它们各自包括彼此共用一个公共旋转轴线的齿轮,因此它们一起旋转。共用的公共旋转轴线也是一个l-mlag相对于相邻l-mlag的旋转轴线,
[0046]
因此,根据本发明的一些实施例,对mlag的总体描述可以是:传动齿轮,该传动齿轮包括可枢转地彼此连接的两个或更多个铰接齿轮组件,每个铰接齿轮组件可以包括至少两个彼此啮合的齿轮,其中每个铰接齿轮组件中的一个齿轮与另一个铰接齿轮组件中的一个齿轮一起在公共轴线上旋转。
[0047]
现在参考图3a和图3b,它们分别描绘了根据本发明的一些实施例的多连杆铰接齿轮箱(mlag)300的侧视图和等距视图。mlag 300描绘了在l-mlag的非共线位置处构造的两个l-mlag(类似于图2b中的俯视图-2描绘的实施例)。当mlag 300在一个端部处连接到静止点301时,另一个端部302可以改变其与点301的距离d,如角箭头303所描绘的。如果需要(或想要)将mlag 300的输出齿轮定位在与输入齿轮不同的平面上,可以使用图3b中清楚描绘的结构。
[0048]
现在还要参考图4a和图4b,其描绘了根据本发明的一个实施例的另一种类型的多连杆铰接齿轮箱(mlag)400的侧视图和等距视图。在图4a中,为了提高图的清晰度,l-mlag
的结构部分被呈现为半透明的,然而很明显,齿轮402a、402b和402c在公共平面中啮合,并且被支撑,如例如关于图2a的mlag 200所解释的。假设齿轮402a连接到静止点401,齿轮402c的示例性运动范围由箭头408例示,示出了在一个端部402cl到另一个端部402cr之间的可选运动范围。
[0049]
图4a中的圆412和414分别代表围绕静止点401的齿轮402c的中心402c(o)的可选几何位置的外部和内部边界,其中当所有三个齿轮都沿着一个径向定位时圆412的半径是给定的,并且当齿轮402c几乎接触齿轮402a时获得圆414的半径。
[0050]
现在参考图5,图5描绘了根据本发明的一个实施例的具有传动比为1∶n(n≠1或n=1)的多连杆铰接齿轮箱(mlag)500。在这种情况下,除了通过齿轮组件转换旋转动力的解决方案之外,还允许改变其输入轴线和输出轴线之间的距离,需要将传动比从1∶1(如在图2a、图2b、图3a、图3b、图4a和图4b的示例中)改变为另一传动比,根据本发明的一些实施例的mlag的基本结构可以用于此目的。如图5所见,旋转动力可以提供给齿轮502,齿轮502使齿轮504(mlag 500中的公共齿轮)旋转,然后齿轮504使齿轮506(输出齿轮)旋转。虽然齿轮502和504可以具有1∶1的内部传动比(具有相同的齿数),但是齿轮506可以具有不同于齿轮504的齿数(在图5的示例中更大)。在这种情况下,输出l-mlag 510b,包括齿轮504和506,用作降速传动级。
[0051]
现在参考图6,其示意性地描绘了根据本发明的附加实施例的具有传动比为1∶n(n≠1或n=1)的多连杆铰接齿轮箱(mlag)600。mlag 600可以具有两个l-mlag 606a和l-mlag 606b。在图6的示例中,每个l-mlag包括两个齿轮。l-mlag 606a包括齿轮602a和602b,具有的降速比为1:2(齿轮602b的齿数是齿轮602a的两倍)。l-mlag 606b包括齿轮604a和604b,具有的降速比为1:2(齿轮602b的齿数是齿轮604a的两倍)。齿轮602b和604a围绕公共轴线一起旋转。因此,在该示例中转速降低的累积效果是1∶4的降速比(输出转速是输入转速的0.25)。
[0052]
现在参考图7,图7描绘了根据本发明的一个实施例的具有多个输出的多连杆铰接齿轮箱(mlag)700。mlag 700包括一个输入l-mlag 706a和两个l-mlag 706b和l-mlag 706c(aa)。每个l-mlag包括两个齿轮,并且三个l-mlag共用一个中心旋转轴线708,来自齿轮702的旋转动力通过该中心旋转轴线传递到输出齿轮704a和704b。此外,通过绕轴线708自由地旋转,l-mlag 706b和l-mlag 706c可以改变它们相对于l-mlag 706a的相对角度。在图7的示例中,从输入齿轮702到输出齿轮704a和704b的传动比是1∶1;然而,对于本领域技术人员来说,显然可以实施其他传动比。
[0053]
现在参考图8,图8描绘了根据本发明实施例的具有多级减速的多连杆铰接齿轮箱(mlag)800。mlag 800可以包括两个(或更多个)l-mlag 806a和l-mlag 806b,它们体现了mlag的基本操作,其中其输入轴线和输出轴线之间的距离可变,并且此外,它可以采用嵌入其中的旋转减速/增速齿轮。如图8所描绘的,输入轴线802a可以是减速齿轮804a的输入轴线,其中齿轮的外圆周是其输出。齿轮804a的外圆周可以通过齿轮/带轮804b驱动轴线802b,该轴线802b是mlag 800的中心轴线。轴线802b可以是减速齿轮805a的输入轴线(在一些实施例中,其可以类似于减速齿轮804a)。减速齿轮805a可以通过传动带从其外圆周向输出齿轮/带轮805b传递动力,从而向输出轴线802c传递旋转动力。mlag 800举例说明了如以上关于图2a、图2b、图3a、图3b等描述的基本mlag的组合,其中使用减速齿轮804a和805a进
行两级转速降低。
[0054]
现在参考图8a-图8c。根据本发明的一些实施例,图8a、图8b和图8c分别描绘了实施为啮合齿轮的mlag 850、实施为链轮和驱动链的mlag 860以及实施为带轮和驱动带的mlag 870。mlag 850、860和870中的每一个都可以在进行必要改变的情况下根据上述关于mlag 400(图4)、mlag 500(图5)、mlag 600(图6)和mlag 800(图8)的原理进行操作。
[0055]
根据上面描述的本发明的一些实施例,以下是可以使用本发明的多连杆铰接齿轮箱(mlag)实现的特征:
[0056]-将旋转装备的两个单元接合,使得旋转动力从一个单元高效且即时地传递到另一个单元,同时允许一个轴(例如输出轴)相对于第二个轴(例如输入轴)的三维(六个自由度)运动,其中旋转轴线垂直于或接近垂直于旋转平面。
[0057]-允许输入和输出之间具有陡峭的运动角度,即在一个方向上进行较大运动,同时在其他方向上保持扁平或宽的轮廓(slim or wide profile),以节省占用的体积或桥接间隙,例如,如果扁平轮廓允许沿着垂直于旋转轴的平面的大行程和自由低阻力运动,同时最小化轴方向上的距离。
[0058]-使离合器机构能够容易且简单地集成。
[0059]-使旋转减速/增速齿轮能够容易且简单地集成。
[0060]-高效地支持高扭矩、高转速和高动力的传递。
[0061]-提供简单且独立的系统,不需要控制或复杂的子系统(电子设备、油泵或其他控制装置),能够以可靠的方式传递动力。
[0062]-支持通过系统的双向(向前和向后)动力传递。
[0063]
在一些实施例中,可以使用根据以上描述构造和操作的传动齿轮,例如,通过借助于本发明的多连杆铰接齿轮箱(mlag),向相对于行驶的交通工具静止的输入轴线提供旋转动力,并将旋转动力传递给沿着崎岖道路行驶的轮(并且因此相对于行驶的交通工具是动态的),从而为沿着崎岖道路行驶的轮提供简单且可靠的驱动系统。
[0064]
参考图9a和图9b,它们分别描绘了对根据本发明的实施例的图7的多连杆铰接齿轮箱(mlag)700和图3b的多连杆铰接齿轮箱300的示例性使用。图9a描绘了由马达912通过输入轴提供动力的多连杆铰接齿轮箱(mlag)910。如上文参考图7所述,mlag 910通过轮914a和914b各自的输出轴为轮914a和914b提供动力。通常安装在mlag 910的多个输出l-mlag之间的阻尼元件(其在本领域中是已知的)没有画出,以便不模糊该图。可以认为适当的弹力被施加到该多个输出l-mlag,以确保轮与道路的良好依附。如图所示,每个轮914a和914b可以独立地跟随道路的颠簸,而不影响其旋转动力。该实施例可以扩展到用于各种目的交通工具的任意数量的(例如,6
×
6或8
×
8全地形交通工具)的l-mlag。
[0065]
以类似的方式,在图9b中,类似于图3b的mlag 300,mlag 950可用于通过第一l-mlag 953a和第二l-mlag 953b从马达(或其他旋转动力源)952向轮954提供旋转动力。当马达952相对于交通工具底盘静止时,第二l-mlag 953b如箭头956所示进行移动的自由度允许轮954如箭头955所示移动,例如当跟随道路上的颠簸时。
[0066]
现在参考图10,图10是根据本发明的一些实施例提供动力的多轮悬架1000的示意图。多轮悬架1000可以使其轮1020、1030、1040和1050中的每一个或至少一些由设置在嵌齿轮(cog wheel)1010处的旋转动力源提供动力,类似于轮914a和914b(图9a)由旋转动力源
嵌齿轮912提供动力的方式。不同之处在于使用多个“菊花链”旋转动力传动装置1032、1034、1042和1044,它们将旋转动力从轮1030链接到轮1040和轮1050。很明显,从一个轮到其相邻轮的动力传递类型不应该必须通过嵌齿轮的链来实现。例如,可以使用链轮和链条来执行。此外,传动箱是示意性绘制的,以最小化对附图的模糊。可以使用任何类型的传动齿轮箱元件。此外,润滑解决方案可以是任何已知的类型,根据传动单元的具体情况,设计用于提供所需的润滑和散热。在一些实施例中,悬架1000可以使其轮1020-1050适于直接作用在行驶表面上。在其他实施例中,可以进一步使用链条,缠绕在轮上或缠绕在一些轮上,以增强与表面的摩擦。
[0067]
在下面的一些实施例的示例中,传动齿轮(tg)如tg 300(图3)或tg 400(图4)等通常将被称为“多连杆传动单元”(mltu)。
[0068]
现在参考图11a和图11b,它们分别是根据本发明的一些实施例的轮内多连杆传动单元(mltu)1103和1160的示意图。图11a中的mltu 1103可包括两个或更多个传动连杆,适于将旋转动力从动力输入端1103a传递到动力输出端1103b。动力输入端1103a可以是马达,齿轮或类似物。动力输出端1003b可以连接到轮,适于驱动该轮。mltu 1103可以在动力输入端1103a和轮之间提供灵活性和运动自由度。在一些实施例中,mtu 1103可以部分或全部包含在轮辋内,从而能够使安装空间被有效占用。图11a示出了处于两个位置的轮1102:左侧的较低位置1100a和右侧的较高位置1100b。轮1102的垂直位移1101b例示了轮1102的垂直运动自由度,而动力输入端1103a保持在相同的水平1101a处。图11b描绘了mltu 1160,其类似于mltu 1103,提供了由mltu 1160提供动力的轮1152的运动自由度。旋转动力在1160a处提供。轮1152在左侧显示为其较高位置1150a,而在右侧显示为其较低位置1150b。由于动力输入端1160a和轮1152的轴线之间的运动自由度,轮1152的垂直位移1151b得以实现。如图11b所示,当轮1152竖直移动时,动力输入端1160a保持在相同的水平1151a处。在一些实施例中,mltu 1103或1160可以分别类似于例如图8a、图8b或图8c的mlag 850、86或870来实施。
[0069]
现在参考图12,该图是根据本发明的一些实施例的包括多个mlag的传动组件(ta)1200的示意图。ta 1200可以包括以菊花链形式相互连接的多个mlag 1210a、1210b、
…
、1210f,以便能够将旋转动力从输入端1200a传输到输出端1200b。每个mlag(例如,1210a、1210b等)可以包括至少两个l-mlag,如上文关于图3和图4所述。ta 1200在将旋转动力从输入端1200a(其可以是例如静止点)传递到输出端1200b时提供了极大的灵活性,输出端1200b具有运动自由度,以移动由假想圆包围的几乎任何点,该假想圆的半径等于ta 1200完全伸展时的长度。
[0070]
现在参考图13,图13是根据本发明的一些实施例的包括多齿轮单元1310和mltu 1320的传动组件(ta)1300的示意图。根据本发明的一些实施例,适于传递旋转动力的传动装置可以既具有选择传动齿轮比率的灵活性又具有输出轴相对于ta 1300的输入端的运动自由度。ta 1300可包括多比率齿轮箱1310,其可适于提供至少两种不同的旋转传动比。齿轮1310示意性地呈现对应于高速(h.s.)和低速(l.s.)的两种不同的传动比,这可以通过选择器1312来实现,如本领域中已知的,选择器1312在其位置1312a选择l.s比率,而在其1312b选择h.s比率。如上所述,mltu 1320可以提供输出端1300b相对于输入端1300a的运动自由度。
[0071]
现在参考图14,图14是根据本发明的一些实施例的传动装置1400的示意图,传动装置1400独自地包括两个mltu 1410和mltu 1420,mltu 1410和mltu 1420相互之间成角度连接。传动装置1400的动力输入端为1400a,而其输出端为1400b。如上所述,每个mltu 1410和1420为其输入轴提供相对于其输出轴的运动自由度。此外,mltu 1410的输出端1410b可以经由成角度的连接件或成角度的齿轮箱1430连接到mltu 1420的动力输入端1420a,这使得能够通过成角度的连接件来传输旋转动力。因此,mltu 1420的输出端1400b相对于mltu 1410的动力输入端1400a成一定角度。当旋转动力的传输既要求在输出端相对于输入端具有运动自由度又要求输入轴线相对于输出轴线的线是倾斜的时,该实施例可以提供解决方案。
[0072]
现在参考图15,图15是根据本发明的一些实施例的传动装置1500的示意图,传动装置1500包括直齿锥齿轮齿轮箱1510和mltu 1520。如本领域已知的,齿轮箱1510可以是直齿锥齿轮齿轮箱。齿轮箱1510的输入端1500a可以相对于输出端1500c成大致直角设置。输出端1500c可以是mltu 1520的输入轴。因此,并且如上所述,输出端1500b可以相对于1500c具有运动自由度。因此,传动装置1500可以为以下情形的旋转动力传递提供解决方案,既输出端需要相对于输入端成直角设置,并且进一步应该相对于输入端具有运动自由度。
[0073]
上面讨论的传动装置可以用于各种应用。在一个实施例中,根据本发明的一些实施例的传动装置可以用于驱动生产线或印刷机的辊,其中辊的轴线之间的距离应该是可控的,例如,用于设定印刷所需的套准(registration),并且辊之间的相对旋转速度应该紧密相关。在另一个实施例中,根据本发明的一些实施例的驱动传动装置可以用于在测试或开发生产线中能够实现对两个(或更多个)旋转装备(由公共驱动器驱动)的轴线的容易且灵活的设置。
[0074]
假设t
入
是在输入齿轮的轴处对传动箱的输入扭矩,并且t
反作用-出
是传动箱的最后一个齿轮处的反作用扭矩。传动箱由固定件(t
固
)相对于参考系统(例如地面)保持在适当位置,因此,可定义,传动箱相对于参考系统是静止的。
[0075]
根据牛顿运动定律,对系统中某一点(系统被定义为整个传动箱)的力矩求和,根据定义,我们得到的总力矩为零(σm=0)。鉴于上述情况,我们细分为以下两种情况:
[0076]
情况#1
–
传动装置具有偶数个齿轮,其传动比为1:n
[0077]
定义t
入
为ccw,对于偶数个齿轮,t
反作用-出
将是ccw。
[0078]
因为传动比是1:n,|t
入
|=n
·
|t
反作用-出
|
[0079]
当对固定件周围的力矩求和时,我们得到:σm=t
入
+t
反作用-出
+t
固
=0
[0080]
进一步发展,我们可以发现t
固
=(1+n)
·
t
入
[0081]
对于传动比为1:1的情况,t
固
=2
·
t
入
[0082]
情况#2
–
传动装置有奇数个齿轮,其传动比为1:n
[0083]
定义t
入
为ccw,对于奇数个齿轮,t
反作用-出
将是cw。
[0084]
因为传动比是1:n,|t
入
|=n
·
|t
反作用-出
|
[0085]
当对固定件周围的力矩求和时,我们得到:σm=t
入-t
反作用-出
+t
固
=0
[0086]
进一步发展,我们可以发现t
固
=(1-n)
·
t
入
[0087]
对于传动比为1∶1的情况,t
固
=0
[0088]
现在从扭矩计算的一般讨论转向传动齿轮,该传动齿轮用于将旋转动力从附接到
参考框架的旋转源传递到相对于参考框架自由移动的旋转装备,由于传动箱传递的扭矩,该旋转装备可能经历不期望的运动。参考图16a,其是传动箱1600的示意图。传动箱(tb)1600可以通过静止点1602枢转地附接到参考框架。tb 1660包括两个相互啮合的齿轮1600a和1600b。当扭矩t
入
被提供给输入齿轮1600a时,输出齿轮1600b传递扭矩t
出
。tb 1600经受的总扭矩t
总
可表示为:t
总
=t
入
+t
出
≠0,这在许多实施例中是不希望的结果。
[0089]
现在参考图16b,图16b是根据本发明的一些实施例的传动箱1630的示意图;传动箱(tb)1630包括3个齿轮,1630a与齿轮1630b啮合并且齿轮1630b与齿轮1630c啮合。传动箱(tb)1630可以通过静止点1632枢转地附接到参考框架。类似于以上关于图16a的tb 1660进行的扭矩计算,当扭矩t
入
被提供给输入齿轮1630a时,输出齿轮1630c传递扭矩t
出
。tb 1630经受的总扭矩t
总
可表示为:t
总
=t
入
–
t
出
。当传动比为1:1时,t
入
=t
出
,并且相应地t
总
=0。因此,tb 1630包括成一排的三个齿轮,适于将旋转动力从输入齿轮传递到输出齿轮,而传动箱本身相对于参考框架几乎不经受扭矩。
[0090]
在一些实施例中,一个或更多个振动传感器可以放置在传动装置的外表面中或传动装置的外表面上的预定位置,用于感测和传输反映传动装置振动的信号。对传感器安装位置的合理选择,以及依赖于类似传动装置的预先获取的轮廓,可以有助于获得所需维护操作的早期警告。当来自传感器的一个或更多个信号代表的振动超出被认为是“健康运行”范围的范围,无论超过幅度、频率或温度中的任一个时,该传感器信号可以被处理,以便推断是否需要立即或密切维护。
[0091]
在一些实施例中,如上所述的齿轮和传动装置可进一步包括润滑系统、散热系统、机械连接件和加强装置,如可能被特定预期用途所要求和规定的。
[0092]
在一些实施例中,一个或更多个旋转速度控制装置,例如减速/增速齿轮、多传动比齿轮等,可以与一个或更多个mltu集成,以提供具有多速度的旋转动力传动解决方案,其中在输入轴线和输出轴线之间具有运动自由度。
[0093]
上述类型的传动齿轮可以通过产生围绕动力输入轴线作用的反扭矩来响应经过它们传递的扭矩/力矩。需要限制或者甚至消除这种反扭矩。例如,当传动齿轮具有如上所述布置的两个或更多个齿轮并且具有远离输入轴的输出轴时,当旋转动力以与输入动力的旋转方向相反的旋转方向经过齿轮箱传递时,整个齿轮箱将倾向于围绕输入轴旋转。这可能会干扰动力设备的期望操作方式。
[0094]
参考图16a-图16d,图16a-图16d分别描绘了根据本发明实施例的各种多齿轮传动装置1600、1630、1650和1680,以及它们的扭矩和力矩的相应计算。图16a的多齿轮传动装置(mgwt)1600包括两个齿轮1600a和输出齿轮1600b,齿轮1600a通过其轴提供动力,输出齿轮1600b由齿轮1600a提供动力。当向轮1600a的轴提供旋转动力时,起作用的扭矩为:t
入
是齿轮1600a提供给齿轮1600b的扭矩;而t
出
是齿轮1600b提供给mgwt 1600的输出轴的扭矩。t
总
的大小是t
入
和t
出
的代数和。很明显,当扭矩通过mgwt 1600传递时,会产生以下结果:
[0095]
t
总
=t
入
+t
出
≠0
[0096]
在响应扭矩不理想的实施例中,应采取措施使t
总
等于零。因此,通过齿轮传递纯扭矩,而不会导致l-mlag被不希望地致动。
[0097]
现在参考图16b的多齿轮传动装置(mgwt)1630,其根据本发明的一些实施例构建和操作。mgwt 1630包括三个齿轮1630a、1630b和1630c。扭矩可以提供给齿轮1630a的轴,并
且可以通过齿轮1630c的轴传递出去。来自齿轮1630a的扭矩通过齿轮1630b传递到齿轮1630c。当向轮1630a的轴提供旋转动力时,起作用的扭矩是:t
入
是齿轮1600a提供给齿轮1600b的扭矩;t
出
是齿轮1600b提供给mgwt 1600的输出轴的扭矩;且t
总
是mgwt 1600将扭矩从其输入轴传递到其输出轴时的响应扭矩。t
总
的大小是t
入
和t
出
的代数和。很明显,当扭矩通过mgwt 1600传递时,会产生以下结果:
[0098]
例如,传动比为1:1,当t
入
=t
出
时,t
总
=t
入
–
t
出
=0
[0099]
这是期望的结果。
[0100]
现在还要参考图16c的多齿轮传动装置(mgwt)1650,其是根据本发明的一些实施例的图16b的mgwt的等距视图。mgwt 1650包括三个齿轮1650a、1630b和1650c。扭矩可以提供给齿轮1650a的轴,并且可以通过齿轮1650c的轴传递出去。来自齿轮1650a的扭矩通过齿轮1650b传递到齿轮1650c。类似于mgwt 1600b的扭矩计算,这里也适用:
[0101]
例如,传动比为1:1,当t
入
=t
出
时,t
总
=t
入
–
t
出
=0,
[0102]
现在还要参考图16d的多齿轮传动装置(mgwt)1680,其是根据本发明的一些实施例的双连杆mgwt的等距视图。mgwt 1680可被描述为包括mgwt 1650的两个单元,即mgwt 1680的第一部分,命名为mgwt 1680(1),mgwt 1680(1)通过齿轮1680a的轴接收扭矩并通过齿轮1680c的轴传递扭矩。第二部分命名为mgwt 1680(2),mgwt 1680(2)从齿轮1680c的轴接收扭矩,齿轮1680c的轴也是齿轮1680a’的轴,扭矩输入到mgwt 1680(2)。类似于上述关于mgwt 1630和mgwt 1650的扭矩计算,这里适用:
[0103]
当传动比(1)为1:1时,t
总(1)
=t
入-t
出(1)
=0
[0104]
当传动比(2)为1:1时,t
总(2)
=t
入(2)-t
出
=0
[0105]
因此:
[0106]
当传动比(1)和(2)为1:1时,t
总
=t
总(1)
+t
总(2)
=0
[0107]
虽然在本文中已经图示和描述了本发明的某些特征,但是本领域中的普通技术人员现在应会想到很多修改、替换、变化和等效形式。因此应理解,所附权利要求旨在涵盖落在本发明的真实精神范围内的所有这样的修改和变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1