用于机动车的泊出动作的光学随动的方法
1.本发明涉及一种具有权利要求1的前序部分特征的用于机动车的泊出动作的光学随动的方法。
2.例如从文献de 102 48 650 a1中已知这种方法。具体而言在此将部分的或完整的、线性的车辆轮廓作为光外观图像显示在路面上。该车辆轮廓用作在泊入或者说进车位或泊出或者说出车位时用于机动车的调车辅助并且通过安装在车辆中的照明器件产生。通过挡位识别器件可以确定由驾驶员挂入的挡位。在挂入倒挡时,至少在车尾的区域中显示部分的车辆轮廓。为了显示车辆的轮廓,光基本垂直或以相对于垂直线很小的角度从照明器件沿向路面上的方向发射。以此产生车辆轮廓,其尺寸与车辆的外部尺寸基本一致。通过输入单元,车辆的驾驶员可以规定应当在哪些车辆侧面和/或车辆角部处显示在路面上的部分的车辆轮廓。
3.在文献de 198 57 401 a1中说明了用于货车的倒车辅助装置。在此,以两个投射到路面上的光斑的形式产生车辆尾部的两个车辆外角部的光学可见的标记。因此使得车辆的驾驶员能在没有外界帮助的情况下,将车辆在向后行驶时向期望的位置中动作。该光斑界限清晰并且具有10至15厘米的直径。该光斑的投射通过货车的投影设备进行,使得对驾驶员来说可以通过安装在货车上的外后视镜看到光斑。
4.最后,文献de 10 2015 200 044 a1公开了一种用于辅助机动车的动作过程的方法。在该方法中,机动过程在通过驾驶员的监视下自动进行,而驾驶员处于在机动车外部的监视位置。基于预定的标准确定优选的监视位置并将该监视位置驾驶员可见地投射到地面上。
5.从上述现有技术出发,本发明要解决的技术问题是,建议一种方法,利用该方法可以提高交通参与者之间的交通安全性。
6.上述技术问题通过具有权利要求1的特征的方法解决。本发明有利的改进设计方案或者说改进设计由相应从属的权利要求得出。
7.本发明首先出发点是一种用于机动车的泊出动作的光学随动(begleitung或称为伴随、护送)的方法。在该方法中,通过至少一个机动车自身的发光装置在道路上产生光外观图像。
8.本发明建议,在意图从位于道路旁边的停车位泊出动作时,在道路上产生光外观图像。在此,所产生的光外观图像的假想的包络面在机动车的平面形状的包络面的至少约三分之一、优选至少一半的尺寸规模(或者说数量级、尺寸)中。相当于机动车的平面形状的约整个包络面或者甚至更大的尺寸规模也是可以考虑的。
9.以此实现基本前提条件,其针对的是将停泊的机动车从它停车位泊出的意图能清楚地显示给其他的交通参与者。
10.在此,包络面应理解为由矩形或圆形形成的面,该矩形或圆形的外周线接触并且以此框住光外观图像的或者说机动车的平面形状的外部尺寸。
11.这种方法的另一个积极的副作用是更好地照明机动车周围环境,例如向后的道路。以此在向后泊出时通过倒车摄像头更好地识别障碍物。在向后存在凹凸不平时,所产生
的光外观图像明显可见地变形。
12.为了甚至在日光下也改善光外观图像的可见性,根据本发明构思的另一种设计也建议光外观图像由至少一个整面或者完全照明的光区段形成或由至少一个限定面的边界的线形成,即仅仅由轮廓形成。为了产生完全照明的光区段,机动车例如可以配备至少一个合适的光投射系统。可以考虑,限定面的边界的轮廓可以通过使用至少一个激光单元产生,该激光单元的激光束可以循环扫过期望的轮廓。
13.在此非常适宜的是,根据检测到的环境亮度进行光外观图像的形成。以此可以始终保证光外观图像的最佳的可见性。因此在黑暗的环境光下(例如黄昏),优选借助光投射系统产生一个或多个完全照明的光区段,并且在亮的环境光下(例如日光)优选借助激光单元产生一个或多个轮廓。
14.为了进一步提高光外观图像的说服力非常适宜的是,光外观图像包含至少一个确定行进方向的信息或者由至少一个确定行进方向的信息构成。例如,光外观图像可以包括箭头状的光区段或轮廓。还可以想到的是,确定行进方向的信息通过字母数字或文字的指示实现。
15.为了在机动车移出停车位时将机动车的预期的车道(轨迹)“预测性”地显示到街道上,建议在泊出动作期间光外观图像与机动车同步一起移动。换句话说,光外观图像一起“游移”。因此,它的定向和与机动车的间距保持不变。
16.按照本发明另一种设计,光外观图像是动画并且以此能更好地被看到。该动画可以通过至少一部分光外观图像在包络面内部的位置改变实现。也可以想到动画通过形状、尺寸、颜色和/或亮度改变实现。
17.按照本发明构思的另一种设计也建议,在泊出过程之后光外观图像熄灭,并且此后在机动车后方在地面或道路上短暂地产生或者能产生其他的光外观图像。利用这种其他的光外观图像可以将感谢信息传送给友善地让本机动车泊出的交通参与者。这种感谢信息优选可以通过符号或者甚至通过文字信息形成。在此可以想到,这种光外观图像在泊出过程完成后由驾驶员手动(例如通过操纵开关)产生或者甚至在传感式识别到其他等待的交通参与者后自动产生。
18.对于良好的可见性有利的是,在机动车意图从相对于道路倾斜或垂直布置的停车位向后进行泊出动作时,在道路的位于机动车后方的区域上产生光外观图像。
19.然而在意图从平行于道路布置的停车位进行侧向泊出动作时适宜的是,在道路的侧向地位于与机动车并排的区域上产生光外观图像。
20.为了能提前给其他交通参与者指示机动车向后的泊出意图,而驾驶员又不必顾及光外观图像的产生,建议在挂入倒挡时自动产生光外观图像并且在挂入前进挡时再熄灭光外观图像。当然这既适用于自动变速器也适用于手动变速器。
21.只有当机动车位于相对于道路倾斜或者垂直布置的停车位上时,在机动车后方产生光外观图像才是适宜的。因为在这种情况中,因为在前方停泊有机动车,所以对泊出的机动车的视线通常特别不利。只有在这种情况中,以所述方式在机动车后方的道路上产生光外观图像才对其他的交通参与者带来明显的信息优势。若机动车停放在在道路侧边平行于道路定向的停车位或停车空位中,则这种在机动车后方产生光外观图像对其他的交通参与者来说没多大用处。因此,为了节约能源,建议只有在由机动车或机动车方面的传感器确定
在机动车后方紧邻处没有障碍物时,才在挂入倒挡时产生光外观图像。例如可以通过泊车辅助装置的超声波传感器的通常的作用范围确定紧邻处。若机动车位于与道路平行定向的停车空位中并且在此被其他机动车“框住”,则在挂入倒挡时在机动车后方不产生光外观图像。
22.然而若机动车停放在相对于街道倾斜或垂直的停车位上,则通常在机动车泊出时在机动车后方在道路上没有固定的障碍物。在这种情况中光外观图像的产生是适宜的。
23.为了使得光外观图像能易于理解地指示机动车在后退时即将处于的位置有利的是,产生的光外观图像的假想的包络面以这样的间距在机动车后方产生,该间距在机动车长度的约七分之一直至约四分之一的范围内。
24.同样可以提前给其他的交通参与者指示机动车的侧向泊出意图,方式是在操纵左转向指示器时和/或在向左达到一定的转向偏转角度和/或在挂入前进挡时产生光外观图像。转向指示器的操纵可以通过转向指示器监视装置监视。通过转向角传感器可以方便地测量转向偏转角度。
25.然而在这种情况中与向后泊出相反地适宜的是,在由机动车确定在停泊的机动车后方紧邻处有障碍物时,才产生光外观图像。这可以推断出在机动车后方停泊有另外的机动车。它挡住了停泊的机动车并且因此在此情况中产生光外观图像是适宜的。
26.为了使得光外观图像能易于理解地指示机动车在侧向泊出时即将处于的位置有利的是,产生的光外观图像的假想的包络面以这样的与机动车并排的间距产生,该间距在机动车宽度的约五分之一直至约一半的范围内。
27.本发明的优选实施例在附图中示出并且根据附图在下文的说明中进一步阐述。以此表明本发明的其他优点。同样的附图标记,甚至是在不同附图中的同样的附图标记针对的是相同的,类似的或者功能相同的构件。在此甚至当不对其进行反复说明或者引用时,实现了相应的或者类似的特性和优点。附图不是或者至少不总是符合比例的。在一些附图中,比例或者间距被夸张地示出,以便明显突出实施例的特征。
28.分别示意性地有:
29.图1a至1g示出按照本发明的方法的向后泊出过程的流程,
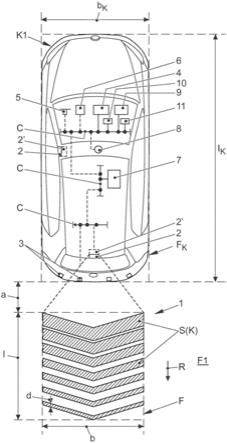
30.图2示出适于执行该方法的机动车连同产生的光外观图像的单独视图,
31.图3示出机动车即将进行侧向泊出过程的视图,
32.图4示出按照图3的机动车连同产生的光外观图像的单独视图。
33.首先参照图1。在这些附图中可见机动车k1,其位于停车位p上。停车位p是多个停车位p中的一个,其布置成与街道的道路f1并排。f2表示街道的对向道路。
34.停车位p以其纵向延伸相对于道路f1倾斜地布置。与该实施例不同的是,如果停车位p以其纵向延伸相对于道路f1垂直地定向,也可以执行该方法。
35.这种交通情况经常出现。对于以速度v2接近的机动车k2来说,由于在机动车k1前方停泊的机动车,所以通常很难及时识别到这样停泊的机动车的泊出意愿。若机动车在计划的泊出过程之前打开转向指示器,挂入倒挡并且以此打开倒车灯,则也是这种情况。
36.在本实施例中弥补这一缺点,方式是通过机动车k1的机动车自己的发光装置(此处未示出)在泊出动作时在路面f1上产生光外观图像1。
37.光外观图像1由机动车k2或者由其驾驶员清楚地看到。详细的设计下文中还会详
述。
38.要提到的是,在挂入倒挡时已经由机动车k1产生光外观图像1。因此,接近的交通参与者提前被指示机动车k1意图泊出(见图1a)。
39.由于光外观图像1的设计,所以机动车k1的意图泊出已经被机动车k2提前知道,所以机动车k2以足够的机动距离停在假想的停车线h2上(见图1b)。
40.现在机动车k1的驾驶员自己注意到,他的泊出意愿已经被机动车k2记录。接着,机动车k1以很低的速度v1从停车位p驶出(见图1c和1d)。
41.最后,机动车k1的泊出过程结束,机动车k1以与机动车k2很小的间距在假想的停车线h1处停止(图1e)。
42.注意的是,在整个泊出过程期间,光外观图像1的定向和与机动车k1的间距保持不变。因此,光外观图像1随机动车k1一起移动(见图1a至1e)。
43.在泊出过程之后,机动车k1的驾驶员再挂入前进挡并且首先以较低的速度v1沿通常的行驶方向行进。光外观图像1熄灭,优选在挂入前进挡时就熄灭。由于机动车k1的驾驶员希望感谢等待的机动车k2的善意和体谅,所以然后在道路f1上短暂地产生其他的光外观图像1'。光外观图像1'用于向机动车k2传送感谢信息。在本实施例中,它是友好的向机动车k2眨眼的脸(见图1f)。
44.与本实施例不同的是当然也可以想到其他的光外观图像,利用其可以向机动车k2传送相应的感谢。例如可以通过示出向上指向的大拇指的图形或“谢谢!”的文字信息实现。
45.现在根据图2更详细说明机动车k1和光外观图像1的产生。机动车k1为此具有布置在车尾侧车顶区域中的发光装置2和发光装置2'。此外在左侧,中部的车顶区域中存在有发光装置2和发光装置2'。发光装置2是光投射装置,利用其可以将完全照明的光区段s投射到道路f1上。
46.备选地可以设想的是,通过构造成激光单元的发光装置2'可以在道路f1上形成一个或多个限定确定的面的边界的线性的轮廓k。
47.使用哪种发光装置(2或2')取决于环境的光条件。其由设计成亮度传感器的传感器6测量。传感器6通过优选设计成can总线的数据总线c与评估和控制装置7在信号技术上连接。
48.若环境亮度超过确定的存储的界限值,例如在日光下,则借助发光装置2',即借助激光产生光外观图像1并且在路面f1上形成具有相应高的光密度的上述轮廓k。若低于该界限值,例如在夜间或黄昏时,则使用发光装置2就足够了,并且产生所述的光区段s。
49.如上所述,光外观图像1可以只具有一个或甚至多个这种光区段s或轮廓k。在任何情况下,光外观图像1这样产生,即在机动车k1后方的间距a处产生假想的包络面f。
50.在此,在该实施例中所述包络面f通过光外观图像1的外部的线或者角部的矩形包框形成。因此包络面f是该包框的宽度b和长度l的乘积。
51.相反,机动车k1具有包络面f
k
,该包络面由包围机动车k1的平面形状的包框的宽度b
k
和长度lk的乘积形成。
52.为了发挥根据本发明的方法的作用和使光外观图像1引起其他交通参与者的注意,在机动车k1后方产生的光外观图像1的包络面f是至少包络面f
k
的约三分之一这样的尺寸规模。
53.为了进一步提高灯光外观图像1的效果,光外观图像1以在机动车k1后方的间距a产生,间距a在长度lk,即机动车k1的长度的约七分之一直至约四分之一的范围内。
54.机动车k1还具有布置在机动车尾部处的传感器3,其优选设计成泊车辅助装置的超声波传感器。借助传感器3,机动车1可以检测在挂入倒挡的时刻在机动车k1后方是否存在障碍物。可以通过换挡监视装置9检测挂入倒挡还是前进挡。
55.但是相对于传感器3备选地和/或补充地,也可以想到使用至少一个传感器8,其例如可以设计成相机。这种传感器例如可以布置在机动车k1的车顶上。
56.若在挂入倒挡时检测到位于机动车k1后方的静态的障碍物,该障碍物在循环测量时因此也不变化(然而在有机动车经过旁边时会变化),则认为机动车k1不位于相对于车道倾斜或者垂直的停车位中。相反可能的是,机动车k1例如停泊在平行于道路定向的停车位中并且位于两个其他机动车之间。为了节省能源,因此在这种情况中在挂入倒挡时不产生光外观图像1。
57.此外还要指出,包络面f的宽度b优选等于或者小于包络面f
k
的宽度b
k
,即机动车k1的宽度。此外可以看到,光外观图像1包含方向指示r。方向指示r向后指向,即与一般的行进方向相反。在本实施例中,方向指示r以此实现,即光区段s或者轮廓k设计成箭头状向后指向。此外,随着与机动车k1间距增加,光区段s或轮廓k的厚度d不断减小。由此也增加了视觉信息的可理解性。
58.如前所述,光外观图像1'的产生(见图1f)用于向其他的交通参与者,在此向机动车k2的驾驶员短暂地传送感谢信息。光外观图像1'的产生可以通过机动车k1的驾驶员手动通过开关5产生。但是也可以想到通过输入和显示装置4将其自动化,所述输入和显示装置4例如可以设计成车载计算机的屏幕。通过输入和显示装置4例如可以设置在光外观图像1产生之后,在重新挂入前进挡时,光外观图像1'基本上在较短的时间内产生。
59.图3示出机动车k1如何与上述方法相似地,在面临从平行于道路f1布置的停车位p侧向地泊出动作时移动。在这种情况中,光外观图像1在机动车k1侧向在道路f1上产生,优选在驾驶员操纵向左的转向指示器fa和/或转向偏转角度向左达到确定的界限值之后。这些触发器通过转向角传感器10和通过转向指示器监视装置11监视(参见图2或4)。在其他方面都与向后的泊出过程相似。在侧向的泊出过程之后优选随着方向盘摆正(转向角=零)再次产生其他的光外观图像1'(见图1f,在此未示出)。
60.图4再次示出重要的尺寸关系。即使在侧向泊出的情况下,光外观图像1的包络面f至少大约与机动车k1的平面形状的包络面f
k
的三分之一一致。光外观图像1与机动车k1的侧向的间距a在机动车k1的宽度b
k
的约五分之一直至约二分之一的范围内。通过这种间距a实现了,光外观图像1不过远地向对向道路f2的方向在道路f1上产生。
61.附图标记列表:
62.1、1' 光外观图像
63.2、2' 发光装置
64.3 传感器,超声波传感器
65.4 输入和显示装置
66.5 开关
67.6 传感器,亮度传感器
68.7 评估和控制装置
69.8 传感器,相机
70.9 换挡监视装置
71.10 转向角传感器
72.11 转向指示器监视装置
73.a 间距
74.b 宽度
75.b
k 宽度
76.c 数据总线(can)
77.d 厚度
78.fa 转向指示器
79.f 包络面
80.f
k 包络面
81.f1 道路
82.f2 对向道路
83.h1、h2 停车线
84.k 轮廓
85.k1 机动车
86.k2 机动车
87.l 长度
88.lk 长度
89.p 停车位
90.r 方向指示
91.s 光区段
92.v1 速度
93.v2 速度