车载设备控制装置的制作方法
[0001]
本发明涉及车载设备控制装置。
背景技术:
[0002]
例如,在日本特开2014-088150号公报中公开了如下技术:在包括中央网关及多个ecu即electronic control unit(电子控制单元)在内的车载网络中,监视搭载于车辆的电池的状态。另外,公开了在电池余量变少时,进行强制使ecu转为休眠状态等的控制。
[0003]
在车辆中,作为消耗电池的电力的车载设备,首先可列举有前照灯、尾灯、室内灯等照明设备。这些照明设备在车辆的移动中不可或缺。除此之外,空调、音响、显示器等电子设备也都被搭载于几乎所有的车辆中。这些电子设备是为了确保移动中的车内舒适性而必不可少的。
[0004]
除此之外,近年来为了预防、减轻事故,搭载有adas(advanced driver assistancesystem)即高级驾驶辅助系统的车辆与日俱增。在搭载有adas的车辆中,搭载于车辆的摄像机等传感器的数量不断增加,越来越高精细化。
[0005]
另外,最近出现了能与互联网保持连接的被称为联网车(connected car)的车。在联网车中,为了与移动电话网、wifi等连接而搭载有通信设备。
[0006]
进而,在不久的将来,预计还将出现与ads(autonomous driving system)即自动驾驶系统相适应的车辆、与作为maas(mobility as a service,出行服务)的服务提供单元的交通工具相适应的车辆。在与ads相适应的车辆中,可以预计搭载于车辆的摄像机等传感器的数量会进一步增加、高精细化。另外,必须搭载进行高度运算的车载计算机。在与maas相适应的车辆中,为了提供例如物流、医疗、饮食、空间等服务,预计将增加搭载医疗设备、烹饪设备、大型显示器等目前为止的车辆中尚未有过的新的电子设备。
[0007]
因此,如图16所示,随着车载设备的增加和车载设备提供给用户的服务的多样化,车载设备的耗电今后也会日益增加。
[0008]
对此,可以考虑将例如日本特开2014-088150号公报所公开的技术应用于如上所述搭载有具有向用户提供某种服务的功能的车载设备的车辆中。在该情况下,通过进行若电池余量变少则强制使ecu转为休眠状态等停止提供服务的控制,有可能致使用户无法享受想要的服务,降低车内的舒适性。
技术实现要素:
[0009]
本发明提供一种能使车载设备的服务的提供时间延长的车载设备控制装置。
[0010]
第一方式涉及的车载设备控制装置包括存储器以及处理器。处理器配置为,在判断为搭载有具有包括向用户提供服务在内的功能的车载设备的车辆的状态发生转变的情况下,获取在所述车辆的状态转变后所述车载设备所要求的通信量以及运算量中的至少一者;处理器根据至少所述车辆的电池的状态,判断是否变更所述车载设备的参数,以实现获取到的通信量以及运算量中的至少一者。
[0011]
在第一方式中,在判断为车辆的状态发生转变的情况下,基于至少车辆的电池的状态,判断是否变更车载设备的参数,以便在车辆的状态发生转变后实现车载设备所要求的通信量以及运算量中的至少一者。由此,在判断为变更车载设备的参数的情况下,通过变更车载设备的参数,从而实现车辆的状态发生转变后车载设备所要求的通信量以及运算量中的至少一者。因此,根据转变后的车辆的状态来调整车载设备的动作。另外,在判断为不变更车载设备的参数的情况下,通过不变更车载设备的参数,车载设备继续保持与转变前的车辆的状态相应的动作。
[0012]
这样,在第一方式中,基于至少车辆的电池的状态,有选择地调整车载设备的动作。由此,与若电池余量变少则进行停止服务的提供的控制的情况相比,能够使车载设备的服务的提供时间延长。
[0013]
第二方式为,根据本发明的第一方式,在所述车辆的行驶状态以及所述车载设备提供的服务中的至少一者变化了的情况下,判断为所述车辆的状态发生转变。
[0014]
车辆的行驶状态的变化、车载设备提供的服务的变化均与电池的放电量的变化相关。第二方式能够将与电池的放电量的变化相关的事件的发生判断为车辆状态的转变。
[0015]
第三方式为,根据本发明的第一方式,所述存储器存储第一信息及第二信息,该第一信息规定所述车辆的每一种行驶状态下的通信量以及运算量中的至少一者,该第二信息规定提供的每一项服务的通信量以及运算量中的至少一者。所述处理器通过将与所述车辆的状态转变后的行驶状态对应的所述第一信息和与所述车辆的状态转变后提供的服务对应的所述第二信息相乘,从而获取所要求的所述通信量以及运算量中的至少一者。
[0016]
在第三方式中,能够通过将第一信息与第二信息相乘这一简易的处理来实现获取在车辆的状态转变后车载设备所要求的通信量以及运算量中的至少一者。
[0017]
第四方式为,根据本发明的第一方式,所述处理器还进行更多的判断。处理器根据所述车辆的电池的状态、所述车辆的行驶状态、以及所述车载设备的耗电预计是否将随着所述车载设备的参数的变更而减少,判断是否变更所述车载设备的参数。
[0018]
第四方式考虑安全性、以及随着变更车载设备的参数的变更而将发生的电池余量的变化趋势,能够更适当地进行是否变更车载设备的参数的判断。
[0019]
第五方式为,根据本发明的第一方式,所述处理器在判断所述电池的状态是否为放电中的第一判断为否定、且判断所述车辆是否处于行驶中的第二判断为肯定的情况下,判断为不变更所述车载设备的参数。
[0020]
在第五方式中,在电池的状态不为放电中、且车辆处于行驶中的情况下,判断为不变更车载设备的参数,从而能够优先照顾安全性。
[0021]
第六方式为,根据本发明的第一方式,所述处理器在判断所述电池的状态是否为放电中的第一判断为否定、且判断所述车辆是否处于行驶中的第二判断为否定的情况下,判断为变更所述车载设备的参数。
[0022]
在第六方面中,在电池的状态不为放电中、车辆不处于行驶中的情况下,判断为变更车载设备的参数,从而能够安全地进行车载设备的参数的变更。
[0023]
第七方式为,根据本发明的第一方式,所述处理器进行更多的判断。处理器在判断所述电池的状态是否为放电中的第一判断为肯定、且判断所述车载设备的耗电预计是否将随着所述车载设备的参数的变更而减少的第三判断为肯定的情况下,判断为变更所述车载
设备的参数。
[0024]
在第七方式中,在预测到电池的状态为放电中、车载设备的耗电将随着车载设备的参数的变更而减少的情况下,判断为变更车载设备的参数,从而能够抑制电池的放电量。
[0025]
第八方式为,根据本发明的第一方式,所述处理器进行更多的判断。处理器在判断所述电池的状态是否为放电中的第一判断为肯定、且判断所述车载设备的耗电预计是否将随着所述车载设备的参数的变更而减少的第三判断为否定、且判断所述电池的余量是否在规定值以上的第四判断为否定的情况下,判断为不变更所述车载设备的参数。
[0026]
在第八方式中,在电池的状态为放电中、车载设备的耗电预计不随着车载设备的参数的变更而减少,且电池的余量不在规定值以上的情况下,判断为不变更车载设备的参数。由此,能够避免电池的放电量的增加。
[0027]
第九方式为,根据本发明的第一方式,所述处理器进行更多的判断。处理器在判断所述电池的状态是否为放电中的第一判断为肯定、且判断所述车载设备的耗电预计是否将随着所述车载设备的参数的变更而减少的第三判断为否定、且判断所述电池的余量是否在规定值以上的第四判断为肯定的情况下,判断为变更所述车载设备的参数。
[0028]
在第九方式中,在电池的状态为放电中、车载设备的耗电预计不随着车载设备的参数的变更而减少,且电池的剩余量在规定值以上的情况下,判断为变更车载设备的参数。由此,能够允许电池的放电量的增加而变更车载设备的参数。
[0029]
第十方式为,根据本发明的第五方式,所述处理器进行更多的判断。处理器在所述第一判断为肯定、且判断车辆是否处于移动中的第五判断为肯定、且判断所述车载设备的参数的变更所需的时间是否小于规定时间的第六判断为否定的情况下,判断为不变更所述车载设备的参数。
[0030]
在第十方式中,在电池的状态为放电中、车辆处于移动中、车载设备的参数的变更所需的时间不小于规定时间的情况下,判断为不变更车载设备的参数。由此,例如能够抑制如下情况的发生,即,在成为不得不使车辆起步的状况时,还处于车载设备的参数的变更尚未完成的状态、即能够正常地提供服务的环境未准备好的状态。
[0031]
本发明具有能够使车载设备的服务的提供时间延长的效果。
附图说明
[0032]
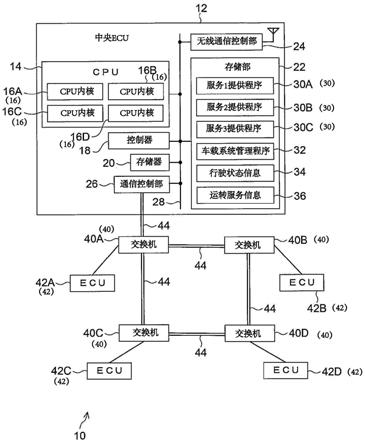
将基于以下内容详细描述本发明的示例性实施例。以下附图中:图1是示出车载系统的概略结构的框图;图2是示出通过中央ecu的控制器执行的车载系统管理处理的一例的流程图;图3是示出车辆的状态的定义的一例的概念图;图4是示出与属于“行驶状态”的每一状态的通信及运算量相关的设定、即行驶状态信息的一例的图表;图5是示出与属于“运转服务”的每一服务的通信及运算量相关的设定、即驾驶状态信息的一例的图表;图6是用于说明通过将“行驶状态”中所要求的通信量、运算量乘以“运转服务”中所要求的通信量、运算量来推断转变后的车辆状态所要求的通信量、运算量的处理的图像图;图7是用于说明根据转变后的车辆状态所要求的通信量、运算量来计算无线通信部、交
换机/通信控制部以及cpu的设定并求出功耗的处理的图像图;图8是用于说明针对无线通信控制部、交换机/通信控制部以及cpu的设定的变更指示的图像图;图9是示出向要求值变更的变更判断处理的一例的流程图;图10是示出向要求值变更的变更判断处理的条件分支的各路径中的作用效果的图表;图11是示出在向要求值变更的变更判断处理中,在车辆行驶中新服务开启(on)时的处理流程的图像图;图12是示出向要求值变更的变更判断处理的另一例的流程图;图13是示出用于判断变更车载系统的参数设定所需的时间的表的一例的图表;图14是表示行驶状态的定义的另一例的概念图;图15a和图15b是示出对车载系统的各通信链路的链接速度的设定的另一例的图像图;图16是示出车辆中的功耗的趋势的线图。
具体实施方式
[0033]
以下,参照附图,对本发明的实施方式的一例进行详细的说明。
[0034]
[第一实施方式]在图1中示出了实施方式所涉及的车载系统10。此外,车载系统10是车载设备的一个例子。车载系统10包括中央ecu 12。中央ecu 12作为为了与联网车、ads、maas等相适应而进行高级的运算处理的车载计算机而被设置于车载系统10。
[0035]
详细而言,中央ecu 12包括:搭载有多个cpu内核16a、16b、16c、16d的cpu(central processing unit,中央处理器)14;以及内置了cpu的控制器18。此外,中央ecu 12包括:rom(read only memory,只读存储器)、ram(random access memory,随机存取存储器)等存储器20;以及hdd(hard disk drive,硬盘驱动器)、ssd(solid state drive,固态驱动器)等非易失性的存储部22。此外,中央ecu 12包括无线通信控制部24和通信控制部26。cpu 14、控制器18、存储器20、存储部22、无线通信控制部24以及通信控制部26经由内部总线28以能够相互通信的方式连接。
[0036]
在存储部22中分别存储有用于提供联网车、ads、maas等服务的多个服务提供程序30a~30c、车载系统管理程序32、行驶状态信息34以及运转服务信息36。由cpu 14执行服务提供程序30a~30c,由控制器18执行车载系统管理程序32。此外,虽然图1示出了在存储部22中存储有三个服务提供程序30的这种配置,但存储于存储部22的服务提供程序30的数量并不限于三个。中央ecu 12是车载设备控制装置的一例,存储部22是存储器的一例,控制器18作为处理器、获取部、判断部的一例而发挥功能。
[0037]
搭载于cpu 14的cpu内核16中的多少个cpu内核运转是可以进行变更的。根据联网车、ads、maas等服务提供程序30的执行状况等的车辆状态,利用控制器18变更运转的cpu内核16的数量的设定。另外,cpu 14的cpu内核16的动作频率也能够变更。根据服务提供程序30的执行状况等的车辆状态,利用控制器18变更cpu内核16的动作频率的设定。这样根据应用程序动作状况而变更运行的cpu内核的数量、动作频率,这种控制在数据中心的服务器设备、智能手机等中已被实际应用。
[0038]
此外,图1示出了在cpu 14中搭载了4个cpu内核16a~16d的结构,但搭载于cpu14
中的cpu内核16的数量并不限于4个。此外,中央ecu 12也可以是多处理器的构成,该多处理器的构成设置有多个cpu,每个cpu搭载了一个以上的cpu内核。
[0039]
无线通信控制部24为了提供联网车、ads、maas等服务,而通过无线通信与车外的数据中心进行数据的收发。作为移动中的经常连接一般使用的基础架构(infrastructure)是移动电话网。作为无线通信的通信方式(以下称为车外通信方式),无线通信控制部24从3g(第三代)、4g(第四代)、5g(第五代)等多个通信标准中选择性地使用。根据联网车、ads、maas等服务提供程序30的执行状况等的车辆状态,利用控制器18来变更无线通信控制部24的车外通信方式的设定。
[0040]
另外,车载系统10包括多个交换机(switch)40a、40b、40c、40d。另外,车载系统10包括与交换机40a连接的ecu 42a、与交换机40b连接的ecu 42b、与交换机40c连接的ecu 42c、以及与交换机40d连接的ecu 42d。交换机40a~40d之间、以及交换机40a与中央ecu 12的通信控制部26之间经由以太网(ethernet,为注册商标)通信线44连接。
[0041]
交换机40a~40d进行中央ecu 12与各ecu 42a~42d之间的数据通信的中继。以往,交换机在高速大容量的以太网通信中被使用,常常被用于办公室、学校等建筑物内。最近也开始在车载网络中使用。
[0042]
此外,以太网通信中,存在多个链接速度、即经过以太网通信线44传输的数据的通信速度,100mbps(兆比特/秒)、1gbps(千兆比特/秒)、2.5gbps、5gbps等已成为标准。而且,交换机40a~40d和通信控制部26能变更链接速度。也就是说,以相同的以太网通信线路44,仅通过改变设定,就能够变更交换机40a~40d之间、以及交换机40a与中央ecu 12之间的以太网通信中的链接速度。这样,适应多个链接速度的交换机面向办公室、学校等的以太网通信而被实际应用。通过中央ecu 12的控制器18变更交换机40a~40d之间、以及交换机40a与中央ecu 12之间的以太网通信中的链接速度的设定。根据联网车、ads、maas等服务提供程序30的执行状态等的车辆状态来变更这些链接速度的设定。
[0043]
ecu 42a~42d是进行车辆的各部分的管理或控制的ecu,ecu 42a~42d中包括进行车辆的电池的管理的ecu。
[0044]
此外,虽然图1示出了设置有四个交换机40和四个ecu 42的结构,但交换机40和ecu 42的数量并不限于四个。另外,交换机40a~40d之间、以及交换机40a与中央ecu 12之间也可以是遵循以太网通信以外的通信标准的通信。
[0045]
接着,参照图2,对第一实施方式的作用进行说明。图2示出控制器18如何变更无线通信控制部24的车外通信方式、交换机40/通信控制部26的链接速度、cpu 14的运转cpu内核数以及cpu内核16的动作频率的各个设定。此外,图2所示的车载系统管理处理通过控制器18执行车载系统管理程序32而实现。
[0046]
在车载系统管理处理的步骤100中,控制器18判断是否发生了车辆状态的转变。在图3中示出了本实施方式中的车辆状态的定义的一例。车辆状态被规定为,在各状态下所需的通信量(即数据量)和随着通信、服务而所需的运算量(即cpu处理量)不同,且以如图3所示的“行驶状态”与“运转的服务”相乘的方式定义。
[0047]
首先,“行驶状态”是只能获取其中任一项的车辆行驶的状态,大致分为“行驶50”和“停止56”这两个状态。“行驶50”是车辆正在以一定以上的速度移动的状态,通信量、运算量均多。“行驶50”分为“自动驾驶52”和“手动驾驶54”这两种状态,“手动驾驶54”即不是自
动驾驶。“自动驾驶52”是通信量、运算量特别多的状态,“手动驾驶54”是通信量、运算量相对较少的状态。
[0048]“停止56”为车辆处于停止的状态,但“停止56”也分为“临时停车58”及“停车60”这两个状态。“临时停车58”是发动机仍在工作以便能随时重新开始行驶的状态,需要一定程度的通信量、运算量。“停车60”是车辆的点火电源断开的状态,所要求的通信量、运算量均为最小。
[0049]
在图4中示出针对“行驶状态”所包括的每个状态汇总了与通信量、运算量相关的设定的信息、即行驶状态信息34。请一并参照图1。图4所示的行驶状态信息中,“冗余路径”表示是否设置用于在车载系统10内发生了通信障碍的情况下进行数据收发的多个通信路径。在“冗余路径”为“不需要”的情况下,能够在以太网通信线44的任意一处使链接速度为零,从而省电。行驶状态信息是第一信息的一个例子。
[0050]
另一方面,“运转的服务”是能按每个服务独立地进行开启和关闭的服务。由于在哪个行驶状态下能够运转是根据服务而不同的,所以通信量、运算量也根据服务而不同。在图5中示出了针对在与maas相适应的车辆中可有的每个服务汇总了与通信量、运算量相关的设定的信息、即运转服务信息36。请一并参照图1。运转服务信息36是第二信息的一个例子。另外,在图5中,作为在与maas相适应的车辆中可有的服务,列举了“移动快递箱”、“无人机协作”、“医疗、烹饪”、“剧场、办公室”,但并不限于此。
[0051]
在步骤100中,在“行驶状态”以及“运转的服务”中至少一者的状态变化了的情况下判断为发生了车辆状态的转变。在步骤100的判断为否定的情况下,反复进行步骤100直至步骤100的判断为肯定为止。
[0052]
一旦发生车辆状态的转变,步骤100的判断为肯定,移至步骤102。在步骤102中,控制器18对在转变后的车辆状态下所要求的无线通信控制部24、交换机40/通信控制部26以及cpu14的设定(车载系统10的参数的设定)进行计算。
[0053]
具体而言,根据图4所示的行驶状态信息34预测转变后的“行驶状态”下所要求的通信量、运算量,并根据图5所示的运转服务信息36预测转变后的“运转的服务”所要求的通信量、运算量。通过进一步将预测出的通信量、运算量相乘,从而推断在转变后的车辆状态下所要求的通信量、运算量。
[0054]
作为一个例子,在图6中示出了转变后的车辆状态为“临时停车58”且“无人机协作”的情况下所要求的通信量、运算量的一个例子。在该例子中,关于车外通信量、车内通信量以及运算量中的每一个量,从“行驶状态”及某些情况下为多个的“运转的服务”取最大值来匹配。关于冗余路径,如果没有任何设定为“要”的路径,则设为“不要”,否则设为“要”。
[0055]
接着,根据在转变后的车辆状态下所要求的通信量、运算量,计算在转变后的车辆状态下所要求的无线通信控制部24、交换机40/通信控制部26及cpu 14的参数的设定。在此,参数的设定是“车外通信方式”、“车内链接速度”、“运转cpu数”、“cpu动作频率”、“冗余路径”。求出变更成算出的设定时的耗电、即推断值。作为一例,图7示出了计算出转变后的车辆状态为“临时停车58”且“无人机协作”的情况下所要求的无线通信控制部24、交换机40/通信控制部26及cpu 14的参数的设定和耗电(推断值)的例子。此外,图7中的虚线示出了无线通信控制部24、交换机40/通信控制部26和cpu 14的各参数依据哪个信息而被设定。
[0056]
这样,在本实施方式中,以在各状态下尽可能成为最低限度的耗电的方式,计算在
每个车辆状态所需的无线通信控制部24、交换机40/通信控制部26及cpu 14的参数的设定。另外,上述步骤102是作为处理器或获取部的控制器18的获取处理的一例。
[0057]
在步骤104中,控制器18进行向要求值变更的变更判断处理。在该向要求值变更的变更判断处理中,判断是变更车载系统10的参数、即无线通信控制部24、交换机40/通信控制部26及cpu 14的参数的设定,还是不变更参数设定而维持,详细情况将在后面叙述。此外,步骤104是作为处理器或者判断部的控制器18的判断处理的一个例子。
[0058]
在步骤106中,判断控制器18在步骤104的向要求值变更的变更判断处理中是否已判断为变更无线通信控制部24、交换机40/通信控制部26及cpu 14的参数的设定。在步骤106的判断为否定的情况下,返回到步骤100。在该情况下,无线通信控制部24、交换机40/通信控制部26以及cpu 14的参数的设定不变更而被维持。
[0059]
另一方面,在步骤106的判断为肯定的情况下,移至步骤108,在步骤108中,控制器18使车载系统10内的通信以及车外通信暂时停止。在下一个步骤110中,作为例子,如图8所示,控制器18对无线通信控制部24、交换机40/通信控制部26以及cpu 14指示参数的设定的变更。由此,变更“车外通信方式”、“车内链接速度”、“运转cpu数”、“cpu动作频率”、“冗余路径”的各参数中的至少一个的设定。若设定变更完成,则在下一个步骤112中,控制器18使车载系统10内的通信以及车外通信再次开始。
[0060]
此外,在步骤108中使通信暂时停止是因为一般无法一边继续通信一边改变通信设备的设定值。但是,关于通信的临时停止的开始以及结束的定时,可以从控制器18通知给各ecu42a~42d。由此,进行数据发送的ecu 42在通信暂时停止的期间,能够积存通信数据,在通信再次开始后,将所积存的通信数据汇总发送。如果是能够允许通信的时间延迟、抖动(jitter)即通信时间的波动的通信服务,则通过在通信暂时停止的期间积存数据,从而能够避免服务停止。
[0061]
接着,参照图9,说明向要求值变更的变更判断处理。在向要求值变更的变更判断处理的步骤120中,控制器18判断车辆的电池的状态是否处于放电中。另外,在步骤120的判断为否定的情况下,是车辆正在以规定速度以上行驶的状态,或者在家、充电站等对电池进行充电的状态。步骤s120是第一判断的一例。
[0062]
在步骤120的判断为否定的情况下,移至步骤122,在步骤122中,控制器18判断车辆是否处于行驶中。步骤s122是第二判断的一例。在步骤122的判断为肯定的情况下,移至步骤s128。在步骤128中,控制器18输出车载系统10、即无线通信控制部24、交换机40/通信控制部26及cpu 14的参数的设定维持,并结束向要求值变更的变更判断处理。
[0063]
这样,在电池的状态不是放电中而车辆在行驶中的情况下,判断为不变更车载系统10的参数的设定,因此能够避免随着车载系统10的参数的设定的变更而安全性降低。
[0064]
此外,在步骤122的判断为否定的情况下,移至步骤130。在步骤130中,控制器18输出车载系统10、即无线通信控制部24、交换机40/通信控制部26及cpu 14的参数的设定变更的实施,并结束向要求值变更的变更判断处理。这样,在电池的状态不是处于放电中且车辆不是在行驶中的情况下,判断为变更车载系统10的参数的设定,因此能够安全地进行车载系统10的参数的设定变更。
[0065]
另一方面,作为电池的状态为放电中的情况、即步骤120的判断为肯定的情况,可列举有停车中(即点火电源断开)、临时停车中(即怠速中)、由于拥堵而低速行驶中等状态。
这些状态是对于变更车载系统10的参数的设定而言比较安全的行驶状态,另一方面,也是电池的余量降低的状况。因此,从防止电池耗尽的观点出发进行以下的判断。
[0066]
即,在步骤120的判断为肯定的情况下,移至步骤124。在步骤124中,控制器18判断车载系统10的耗电预计是否将随着车载系统10的参数的设定变更而减少。步骤s124是第三判断的一例。在步骤124的判断为肯定的情况下,移至步骤s130,输出车载系统10的参数的设定变更的实施。
[0067]
这样,在电池的状态为放电中且车载系统10的耗电预计将随着车载系统10的参数的设定变更而减少的情况下,判断为变更车载系统10的参数的设定,因此能够抑制电池的放电量。
[0068]
另一方面,在步骤124的判断为否定的情况下,即控制器18在车载系统10的耗电预计不随着车载系统10的参数的设定变更而减少的情况下,移至步骤126。在步骤126中,控制器18判断电池的余量是否在阈值以上。步骤s126是第四判断的一例。在步骤126的判断为否定的情况下,移至步骤128,输出车载系统10的参数的设定维持。
[0069]
这样,在电池的状态为放电中,车载设备的耗电预计不随车载系统10的参数的设定变更而减少,且电池的余量不在阈值以上的情况下,判断为不变更车载系统10的参数的设定。由此,能够避免电池的放电量增加。
[0070]
另外,在步骤126的判断为肯定的情况下,移至步骤s130,输出车载系统10的参数的设定变更的实施。这样,在电池的状态为放电中,车载系统10的耗电预计不随着车载系统10的参数的设定变更而减少,且电池的余量在阈值以上的情况下,判断为变更车载系统10的参数的设定。由此,允许电池的放电量的增加,可以变更车载系统10的参数的设定。
[0071]
如上所述,在图9所示的向要求值变更的变更判断处理中,在车载系统10的参数的设定变更时考虑安全方面,仅在车辆停止中、以及电池余量在阈值以上等时,才进行车载系统10的参数的设定变更。图10中汇总了图9所示的向要求值变更的变更判断处理的条件分支的各路径中的作用效果。图10所示的符号a~f与图9内的符号a~f对应。
[0072]
另外,在由于从手动驾驶切换到自动驾驶、或者新的服务被切换为开启等而发生了车辆状态的转变的情况下,短时间内不会有问题。也就是说,即使在如图9所示的向要求值变更的变更判断处理中判断为维持车载系统10的参数的设定,短时间内也不会有问题。
[0073]
即,文件下载、视频
·
音频的流传输这样的服务是以最大努力(best effort)通信的环境为前提而创建的。所谓最大努力通信是指允许通信速度、通信延迟
·
抖动不恒定而有增减的通信。例如,在文件下载中,当通信速度较慢时,通信时间变长,然后,当通信速度变快时,可以将延迟部分弥补回来。此外,例如,在视频
·
音频的流传输中,当通信速度、运算处理能力较低时,降低画质
·
音质来进行流传输,然后当通信速度、运算处理能力恢复时,可以切换为高画质
·
音质。
[0074]
作为例子,在图11中示出了在如图9所示的向要求值变更的变更判断处理中,在车辆行驶中开启了新服务时的处理的流程。由于车辆状态刚刚改变之后处于行驶中,因此如图11中符号l所示,车载系统10的参数的设定不变更。但是,如果所开启的服务是最大努力服务,则能够从该时刻开始提供服务。然后,当车辆停止时,如图11中符号m所示,根据所开启的服务来变更车载系统10的参数的设定。由此,如在图11中由符号n所示,能够舒适地享受所开启的服务。
[0075]
如上所述,在本实施方式中,在判断为搭载有具有包括向用户提供服务在内的功能的车载系统10的车辆的状态发生转变的情况下,获取在车辆的状态发生转变后车载系统10所要求的通信量以及运算量。基于至少车辆的电池的状态,判断是否变更车载系统10的参数的设定,以实现获取的上述通信量及运算量。由此,能够使车载系统10的服务的提供时间延长。
[0076]
另外,在本实施方式中,在车辆的行驶状态和提供的服务中的至少一者发生了变化的情况下,判断为车辆的状态发生转变,因此能够将与电池的放电量的变化相关的事件的发生判断为车辆的状态的转变。
[0077]
另外,在本实施方式中,预先存储有规定车辆的每一种行驶状态下的通信量以及运算量中的至少一者的行驶状态信息34、以及规定提供的每一项服务的通信量以及运算量中的至少一者的运转服务信息36。通过将与车辆的状态转变后的行驶状态对应的行驶状态信息34和与车辆的状态转变后提供的服务对应的运转服务信息36相乘,从而获取所要求的通信量以及运算量。由此,能够通过将行驶状态信息34与运转服务信息36相乘这一简易的处理,来实现获取在车辆的状态转变后车载系统10所要求的通信量以及运算量。
[0078]
另外,在本实施方式中,基于车辆的电池的状态、车辆的行驶状态以及车载系统10的耗电预计是否将随着车载系统10的参数的设定变更而减少,来判断是否变更车载系统10的参数的设定。由此,能够考虑安全性、随着变更车载系统10的参数的设定而将产生的电池余量的变化趋势,更适当地进行是否变更车载系统10的参数的设定的判断。
[0079]
[第二实施方式]接着,对本发明的第二实施方式进行说明。另外,由于第二实施方式与第一实施方式的构成相同,因此对各部分标注相同的附图标记并省略构成的说明,以下,对第二实施方式的作用进行说明。
[0080]
在图9中示出了在第一实施方式中已说明的向要求值变更的变更判断处理。在电池的状态为放电中(即步骤120的判断为肯定),且车载系统10的功耗预计将随着车载系统10的参数的设定变更而减少的情况下(即步骤124的判断为肯定时),如步骤130那样判断为变更车载系统10的参数的设定。作为属于此种情形的状况,可列举出如下状况:例如,在因拥堵而低速行驶中、因等待通行信号而临时停车中,发生车载系统10的参数的设定变更。
[0081]
但是,也可能有即使在因拥堵而低速行驶中、因等待通行信号而临时停车中,也不希望发生车载系统10的参数的设定变更的情况。具体而言,在不能保证车载系统10的参数的设定变更在以秒为单位的短时间内结束的情况下,可能陷入如下状况:在车载系统10的参数的设定变更未完成的状态、即能够正常地提供服务的环境未准备好的状态下,却不得不使车辆起步。
[0082]
考虑到上述情况,在第二实施方式中,作为向要求值变更的变更判断处理,进行如图12所示的处理。在第二实施方式涉及的向要求值变更的变更判断处理中,在步骤120的判断为肯定的情况下,移至步骤132。
[0083]
在步骤132中,控制器18判断车辆是否处于移动中。步骤s132是第五判断的一例。该判断例如能够通过利用车载摄像机拍摄到的图像并根据该图像判断车辆是否在道路上来实现。例如,在能够判断为处于停车场内等车辆未处于道路上的情况下,判断为车辆不是处于因拥堵而低速中或因等待通行信号而临时停车中等,即车辆不是在移动中,步骤s132
的判断为否定,移至步骤124。然后,进行步骤s124及其之后的处理。
[0084]
另一方面,在车辆处于道路上的情况下,可以判断为根据道路状况而不得不使车辆起步的状况的可能性较高。因此,在车辆处于道路上的情况下,步骤s132的判断为肯定,移至步骤134。在步骤134中,控制器18判断车载系统10的参数的设定变更所需的时间是否小于规定时间。步骤134是第六判断的一例。
[0085]
车载系统10的参数的设定变更所需的时间取决于作为变更对象的参数的项目、即“车外通信方式”、“车内链接速度”、“运转cpu数”、“cpu动作频率”、“冗余路径”。如图13中一例所示,在仅变更“车外通信方式”的情况下,对车辆的行驶没有直接影响,因此可以将设定变更所需的时间判断为“短”。另一方面,在变更“运转cpu数”、“cpu动作频率”的情况下,不仅通信需要暂时停止、再次开始,软件的动作也需要暂时停止、再次开始,因此将设定变更所需的时间判断为“长”。可以使用图13所示的表进行步骤134的判断。
[0086]
在车载系统10的参数的设定变更所需的时间在规定时间以上的情况下,步骤134的判断为否定,移至步骤128,输出车载系统10的参数的设定维持。由此,能够抑制出现如下情形,即,例如在成为不得不使车辆起步的状况时,却还处于车载系统的参数的设定变更未完成的状态、即能够正常地提供服务的环境未准备好的状态。另外,在车载系统10的参数的设定变更所需的时间小于规定时间的情况下,步骤134的判断为肯定,移至步骤124,进行步骤124及其以后的处理。
[0087]
另外,在图3中示出了将“行驶状态”分为4个状态,将自动驾驶中的停车状态与手动驾驶中的停车状态均归为“临时停车(怠速)”的例子。但是,“行驶状态”的划分方式并不限定于图3所示的例子。例如,即使均为怠速等的“临时停车”的状态,也可设想到自动驾驶中的通信量、运算量比手动驾驶中的通信量、运算量多。因此,例如,如图14所示,也可以将“行驶状态”分为五个状态。
[0088]
另外,上面对将连接中央ecu 12以及各交换机40a~40d的各通信链路、即以太网通信线44中的“车内链接速度”设定为在车载系统10内一律相同的链接速度的方式进行了说明。请一并参照图7。例如,在图2的步骤102的要求值的计算中,在计算出“车内链接速度”为2.5gbps的情况下,作为例子,如图15a所示,各通信链路中的“车内链接速度”一律设定为2.5gbps。但是,并不限定于此。
[0089]
例如,中央ecu 12以及与各交换机40a~40d连接的ecu 42a~42d的收发数据量一般不一样,流过各通信链路的数据量也大多不一样。在此,如果针对每个通信链路单独预计车载系统10内的收发数据量,则作为一例,如图15b所示,也可以将“车内链接速度”设定为针对每个通信链路而不同的值。这样,不是以各通信链路中的“车内链接速度”均与收发数据量最大的通信链路中的链接速度一致来设定,而是通过单独降低收发数据量比较小的通信链路中的“车内链接速度”,能够实现进一步的省电化。
[0090]
另外,上面对在判断为车辆的状态发生转变的情况下,分别获取在车辆的状态转变后车载系统10所要求的通信量以及运算量,根据至少车辆的电池的状态,判断是否变更车载系统10的参数的设定,以便分别实现所获取的上述通信量以及运算量的方式进行了说明。但是,并不仅限于此,也可以将通信量以及运算量中的任一者作为处理对象。
[0091]
另外,对上述各实施方式中的由控制器18进行的处理为通过执行程序而进行的软件处理的情形进行了说明,但并不仅限于此。例如,也可以是通过硬件进行的处理。或者,也
可以是结合软件和硬件双方的处理。另外,在其为软件的处理的情况下,也可以将程序存储于dvd(digital versatile disc:数字多功能光盘)等各种非临时性存储介质并使其流通,使控制器18的cpu等处理器执行。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1