防止自动驻车系统结冰粘连的控制方法与流程
1.本发明涉及一种自动驻车系统的控制方法,尤其涉及一种防止自动驻车系统结冰粘连的控制方法。
背景技术:
2.随着科学技术的发展,汽车上的自动控制设备使用越来越广泛,其中,自动驻车系统作为可靠、便利的电子设备也被广泛使用。车辆驻车时,自动驻车系统会通过制动系统的摩擦片抱紧制动盘实现车辆驻车。但在低温和雨雪的环境下,尤其在北方冬季时节中雨雪天气频繁,导致制动系统的摩擦片和制动盘表面湿滑,在低温作用下长时间驻车后摩擦片和制动盘上的水分凝结成冰,使摩擦片粘连在制动盘上无法分离,自动驻车系统无法自动释放摩擦片,影响了驻车功能的正常使用。
3.目前,解决上述问题的方法主要包括:1、在车辆启动后,在车辆发动机预热的同时等待摩擦片和制动盘之间的冰层融化脱落,从而恢复自动驻车功能。但在低温、雨雪天气的影响下,该方法的可行性较低,且浪费时间和能耗。
4.2、在车辆启动后,通过动力系统拖动驻车车轮,使摩擦片强行脱离制动盘,但在此过程会产生很大的车辆抖动和噪音产生,对车辆使用舒适性有较大影响;同时也可能导致摩擦片、制动盘等相关部件的损坏。另外,如果地面覆盖冰雪,地面与车轮间的摩擦力不足以抵抗摩擦片强行脱离制动盘所需的动力,会导致驻车车轮处于抱死滑动状态,车轮将失去地面附着力,导致车辆在强行行驶过程中失稳,导致交通事故发生。
5.3、在制动器上加装加热器,通过加热快速融化冰雪,使摩擦片脱离制动盘,不仅增加了硬件成本,还存在加热器及其线束等硬件设备需要占用空间、增加布置难度、需要后期维护等问题,加热过程也一定程度上增加了能耗。
技术实现要素:
6.本发明的目的在于提供一种防止自动驻车系统结冰粘连的控制方法,能通过交替控制两侧驻车轮的制动器的抱紧和释放动作,降低制动器的摩擦片与制动盘结冰粘连的程度,提高车辆的使用舒适性和安全性。
7.本发明是这样实现的:一种防止自动驻车系统结冰粘连的控制方法,包括以下步骤:步骤1:驻车制动时,自动驻车系统判断是否进入粘连预防控制模式,若是,则执行步骤2,若否,则根据车辆工况进行正常的驻车制动控制;步骤2:自动驻车系统控制其中一个驻车轮的制动器执行释放动作,而另一个驻车轮的制动器执行抱紧动作;步骤3:经过一个控制周期后,自动驻车系统控制其中一个驻车轮的制动器执行抱紧动作,而另一个驻车轮的制动器执行释放动作;
步骤4:重复步骤2-步骤3,经过交替控制时间后,执行步骤5;步骤5:自动驻车系统退出粘连预防控制模式,并控制两个驻车轮的制动器同时执行抱紧动作,即执行正常的驻车制动控制。
8.所述的步骤1包括:步骤1.1:自动驻车系统通过雨刮系统采集车辆驻车前行驶过程中的雨水信号,同时通过空调系统采集车外温度信号;所述的雨水信号包括雨刮系统中雨量传感器监测到的雨量信号以及雨刮系统中雨刮片的使用状态信号;步骤1.2:自动驻车系统根据雨水信号判断湿度条件满足,且根据驻车时车外温度信号判断低温条件满足时,则进入粘连预防控制模式;所述的湿度条件包括:(i)车辆驻车前行驶过程中雨量传感器监测到雨量信号,即车辆驻车前行驶过程中有下雨;(ii)车辆驻车前行驶过程中雨刮片的使用状态信号为是,即车辆驻车前行驶过程中有使用过雨刮器;当满足条件(i)和(ii)任一时,自动驻车系统判定为湿度条件满足;当车外温度低于0℃时,自动驻车系判定为所述的低温条件满足。
9.在所述的步骤2和步骤3中,两个驻车轮上的制动器在执行释放和抱紧动作时,执行抱紧动作的制动器先完成抱紧动作,执行释放动作的制动器再执行释放动作。
10.所述的自动驻车系统在进入粘连预防控制模式后,即在步骤2至步骤4中,自动驻车系统通过车辆的轮速传感器采集齿圈脉冲信号,若采集到齿圈脉冲信号,则执行步骤5,若未采集到齿圈脉冲信号,则不动作。
11.所述的自动驻车系统在进入粘连预防控制模式后,即在步骤2至步骤4中,自动驻车系统通过车辆的电力系统采集电池电压信号,并判断电池电压信号是否低于电池电压阈值,若是,则执行步骤5,若否,则不动作。
12.所述的电池电压阈值为10-12v。
13.所述的控制周期为50-70s。
14.所述的交替控制时间为550-650s。
15.本发明与现有技术相比,具有如下有益效果:1、本发明在驻车后的一段时间内采用交替驻车制动控制,控制两侧驻车轮的摩擦片与制动盘之间的抱紧和释放动作,能在确保驻车功能的基础上,大大降低甚至消除低温雨雪等天气下摩擦片与制动盘结冰粘连的情况发生,从而避免现有技术中强行脱离摩擦片和制动盘造成的车辆抖动、噪音甚至部件损坏等问题,有效提高了车辆的使用舒适性和安全性。
16.2、本发明在粘连预防控制模式的控制过程中,通过检测电池电压、轮速、坡度等信号,并在需要时采取正常驻车制动的控制模式,确保车辆的驻车稳定性和可靠性,有效防止溜车等意外发生。
17.3、本发明通过雨量信号、雨刮器的使用状态、车外温度综合判断制动器的摩擦片与制动盘之间是否存在结冰粘连风险,判断准确性高,能更好的优化驻车制动功能,提升车辆驾驶体验。
18.4、本发明通过自动驻车系统的自动控制实现制动器的控制,无需增加加热器等硬
件设备,避免了成本、硬件布置难度和使用能耗的增加,可广泛应用于带有自动驻车系统的各类车型中,同时也可防止由于驾驶员经验不足而忘记做释放操作致使制动器冻结或者盲目释放造成的车辆后溜风险。
19.本发明能通过交替控制两侧驻车轮的制动器的抱紧和释放动作,大大降低制动器的摩擦片与制动盘结冰粘连的程度甚至消除粘连风险,提高车辆的使用舒适性和安全性,尤其适用于低温雨雪等恶劣环境中。
附图说明
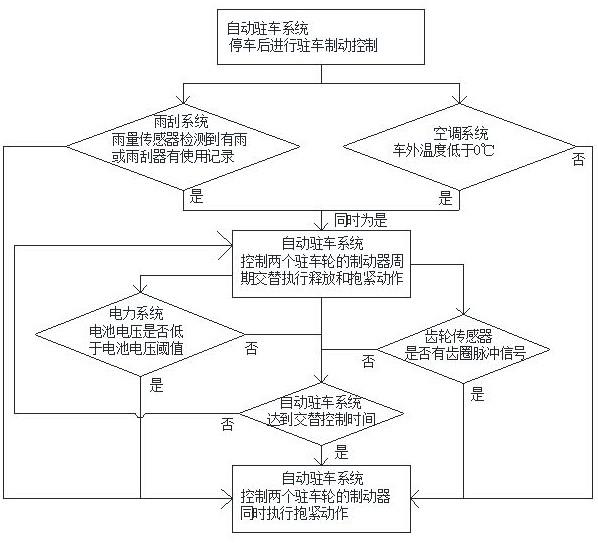
20.图1是本发明防止自动驻车系统结冰粘连的控制方法的流程图。
具体实施方式
21.下面结合附图和具体实施例对本发明作进一步说明。
22.请参见附图1,一种防止自动驻车系统结冰粘连的控制方法,包括以下步骤:步骤1:驻车制动时,自动驻车系统判断是否进入粘连预防控制模式,若是,则执行步骤2,若否,则根据车辆工况进行正常的驻车制动控制。自动驻车系统正常的驻车制动控制与现有的控制方式相同,此处不再赘述。
23.步骤1.1:自动驻车系统通过雨刮系统采集车辆驻车前行驶过程中的雨水信号,同时通过空调系统采集车外温度信号。
24.所述的雨水信号包括雨刮系统中雨量传感器监测到的雨量信号以及雨刮系统中雨刮片的使用状态信号。
25.步骤1.2:自动驻车系统根据雨水信号判断湿度条件满足,且根据驻车时车外温度信号判断低温条件满足时,则进入粘连预防控制模式。
26.所述的湿度条件包括:(i)车辆驻车前行驶过程中雨量传感器监测到雨量信号,即车辆驻车前行驶过程中有下雨,可能导致摩擦片和制动盘沾水。
27.(ii)车辆驻车前行驶过程中雨刮片的使用状态信号为是,即车辆驻车前行驶过程中有使用过雨刮器,也即车辆驻车前的行驶过程中有下雨。
28.当满足条件(i)和(ii)任一时,自动驻车系统判定为湿度条件满足。在雨量较小或下雪/冰雹的情况下雨量传感器可能无法监测到雨量信号,为了提高控制的准确性,通过雨刮器的使用状态来避免误判或漏判。
29.根据车外温度信号的数值,当车外温度低于0℃时,自动驻车系判定为所述的低温条件满足,存在结冰风险。
30.自动驻车系统可通过现有技术的车辆硬线经车辆can通讯协议直接与雨刮系统和空调系统实现通讯,也可通过现有技术的整车控制器经车辆can通讯协议实现与雨刮系统和空调系统的通讯,从而实现相关信号的采集,此处不再赘述,通讯方便,节省线束成本。
31.步骤2:自动驻车系统控制其中一个驻车轮的制动器执行释放动作,而另一个驻车轮的制动器执行抱紧动作。
32.步骤3:经过一个控制周期后,自动驻车系统控制其中一个驻车轮的制动器执行抱紧动作,而另一个驻车轮的制动器执行释放动作。
33.自动驻车系统一般用于控制车辆的后轮,在执行步骤2时,可将左侧驻车轮的制动器释放,右侧驻车轮的制动器抱紧,执行步骤3时,则将左侧驻车轮的制动器抱紧,右侧驻车轮的制动器释放。
34.所述的控制周期可在车辆前期开发时根据车辆状态进行标定,不同车型、性能配置的车辆的控制周期不同,优选的,所述的控制周期可为50-70s。
35.为了确保车辆驻车安全,在所述的步骤2和步骤3中,两个驻车轮上的制动器在执行释放和抱紧动作时,执行抱紧动作的制动器应当先完成抱紧动作,执行释放动作的制动器再执行释放动作,从而防止两个驻车轮的制动器在交替动作的瞬间同时失去驻车制动力而发生溜车事故。
36.步骤4:重复步骤2-步骤3,经过交替控制时间后,执行步骤5。
37.所述的交替控制时间可在车辆前期开发时根据车辆状态进行标定,不同车型、性能配置的车辆的控制周期不同,优选的,所述的交替控制时间可为550-650s。在经过550-650s后,摩擦片与制动盘之间的湿度降低或水分已冻结,结冰粘连的风险大大降低甚至消除,即可执行正常的抱紧动作,实现驻车制动功能。
38.步骤5:自动驻车系统退出粘连预防控制模式,并控制两个驻车轮的制动器同时执行抱紧动作,即执行正常的驻车制动控制。
39.所述的自动驻车系统在进入粘连预防控制模式后,即在步骤2至步骤4中,自动驻车系统通过车辆的电力系统采集电池电压信号,并判断电池电压信号是否低于电池电压阈值,若是,则执行步骤5,若否,则不动作,避免车辆电池电压过低而影响电池的正常使用。自动驻车系统可通过硬线或整车控制器经车辆can通讯协议实现与电力系统的通讯连接,从而采集电池电压信号,此处不再赘述,通讯方便,节省线束成本。
40.所述的电池电压阈值可在车辆前期开发时根据车辆状态进行标定,不同车型、性能配置的车辆的电池电压阈值也不同,优选的,所述的电池电压阈值可标定为10-12v。
41.所述的自动驻车系统在进入粘连预防控制模式后,即在步骤2至步骤4中,自动驻车系统通过车辆的轮速传感器采集齿圈脉冲信号,若采集到齿圈脉冲信号,则执行步骤5,若未采集到齿圈脉冲信号,则不动作,避免溜车的发生。自动驻车系统可通过硬线或整车控制器经车辆can通讯协议实现与轮速传感器的通讯连接,从而采集轮速信号,此处不再赘述,通讯方便,节省线束成本。
42.优选的,自动驻车系统还可采集其他车载设备信号,从而在各种工况和环境下对车辆进行精确的控制。如通过坡度传感器检测车辆驻车位置的坡度,若坡度过大,则不进入粘连预防控制模式,防止单侧制动力过小而导致车辆后溜事故的发生,可采用坡度信号替代轮速信号,获将坡度信号作为冗余信号接入自动驻车系统,用于提高系统的可靠性,达到更准确、更快速的控制响应。
43.实施例:驾驶员在冬天道路上行驶,期间有雨水天气,雨刮系统的雨量传感器监测到有雨水记录,且雨刮片有过刮水动作,雨刮系统将此状态发送至自动驻车系统,自动驻车系统判定为湿度条件满足。当车辆行驶至目的地后,车辆熄火,驾驶员进行了驻车操作,在自动驻车系统将摩擦片夹紧实施驻车前,空调系统监测到车外温度为-2℃,并将此信号发送至自动驻车系统,自动驻车系统判定为低温条件满足。低温条件和湿度条件同时满足,制动器存在结
冰粘连风险,自动驻车系统进入粘连预防控制模式。此时控制左边驻车卡钳的摩擦片保持夹紧状态,然后释放右边驻车卡钳的摩擦片,同时开始计时。控制周期预设为58s,交替控制时间预设为600s,电池电压阈值为11v。当第58s时,先夹紧右边的驻车卡钳的摩擦片,然后再释放左边驻车卡钳的摩擦片。再经过58s后,左边驻车卡钳的摩擦片夹紧,然后再释放右边驻车卡钳的摩擦片,重复上述过程600s后,自动驻车系统再将两边驻车卡钳的摩擦片重新夹紧,退出粘连预防控制模式,自动驻车系统进入休眠状态,此时系统完成了驻车夹紧并避免了驻车卡钳摩擦片被冻结到制动盘上。在交替控制时间内,自动驻车系统通过车辆的电力系统采集到的电池电压信号未低于电池电压阈值11v,且未采集到轮速信号,自动驻车系统在交替控制时间内能保持粘连预防控制模式。
44.以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围,因此,凡在本发明的精神和原则之内所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1