混合动力车辆的曲轴角的检测装置的制作方法
[0001]
本发明涉及检测具备内燃机和电动机或电动发电机作为驱动力源的混合动力车辆中的曲轴角的装置。
背景技术:
[0002]
在具备汽油发动机等内燃机(以下,记为发动机)和电动机或电动发电机(以下,简记为马达)作为驱动力源的混合动力车辆中,能够构成为,不仅马达输出行驶用的驱动力,也通过进行能量再生而减少驱动力或者输出制动转矩。在这种混合动力车辆中发动机正在输出行驶用的驱动力的状态下,不可避免地会产生由发动机中的混合气的爆发性燃烧引起的转矩的变动。另一方面,马达转矩由于进行电控制所以其控制响应性高,另外能够输出所谓的正负的转矩,因此若相对于发动机转矩的变动错开相位而使马达转矩变动,则能够利用马达来抑制马达转矩的变动(脉动)或使马达转矩的变动(脉动)下降。
[0003]
在专利文献1中,记载了构成为进行这样的减振控制的装置。专利文献1所记载的装置是将以下的混合动力车设为对象的控制装置,该混合动力车构成为将发动机和第1马达连接于由行星齿轮机构构成的动力分割(分配)机构,另外将第2马达连结于动力分割机构的输出要素,利用伴随于将发动机转速利用第1马达控制而发电产生的电力来驱动第2马达。并且,该控制装置构成为,在发动机正在输出转矩的状态下,将发动机的曲轴角利用曲轴角传感器来检测,将马达的减振用的转矩基于该检测到的曲轴角而算出。
[0004]
另一方面,在专利文献2中记载了构成为能够切换模式的混合动力车辆。在此,模式是将从动力分割机构向驱动轮传递的转矩设定为预定的状态的运转状态,专利文献2所记载的混合动力车辆构成为切换为将转矩放大并输出的低模式和与低模式相比使转矩下降并输出的高模式。即,专利文献2所记载的混合动力车辆构成为,在动力分割机构的输出侧连结变速用的行星齿轮机构,将该行星齿轮机构的旋转要素彼此的连结状态及与发动机的连结状态利用多个离合器机构来切换。此外,在专利文献2所记载的混合动力车辆中,通过使各离合器机构接合而将所述行星齿轮机构的整体一体化并且与发动机连结,能够将发动机的转矩不增减而经由该行星齿轮机构向输出构件传递。
[0005]
现有技术文献
[0006]
专利文献
[0007]
专利文献1:日本特开2016-182842号公报
[0008]
专利文献2:日本特开2017-7437号公报
技术实现要素:
[0009]
发明所要解决的课题
[0010]
由于马达的转矩控制的响应性优异,所以如专利文献1所记载那样,通过根据发动机转矩的振动或脉动来控制马达转矩,能够抑制混合动力车辆的驱动转矩的振动。然而,专利文献1所记载的装置利用附设于发动机的曲轴角传感器来检测曲轴角,将该检测到的数
据向马达用的控制装置(例如,p-ecu)传送而控制马达转矩。因而,检测曲轴角的循环时间、检测到的数据的传送所需的时间成为马达转矩的控制的延迟要因,在发动机转速成为了某种程度低的转速的情况下,有时因马达转矩的控制的延迟而无法恰当地进行驱动转矩的减振。
[0011]
另一方面,有时采用永磁体式的同步电动机作为马达,在这种马达中,具有用于检测旋转角度(电角度)的旋转变压器,因此可考虑利用该旋转变压器来检测曲轴角,并且利用该检测到的数据来进行驱动转矩的减振用的马达转矩的控制。若进行这样的控制,则能够消除或降低上述的伴随于数据的传送的延迟。在专利文献1所记载的混合动力车辆中,发动机及第1马达经由动力分割机构而连结于驱动轮,在该驱动轮连结有第2马达,因此由各马达的旋转变压器检测到的旋转角度和曲轴角始终维持恒定的关系。
[0012]
然而,如专利文献2所记载那样,在构成为能够切换行驶模式(或驱动模式)的混合动力车辆中,发动机的曲轴角与由马达的旋转变压器检测的旋转角度的关系按各模式而不同,因此,若在检测曲轴角并执行着某些控制时产生模式的切换,则曲轴角与由旋转变压器检测的旋转角度的关系会变化,根据旋转变压器,会产生无法准确地检测曲轴角的事态。即,旋转变压器是构成为对因旋转的转子与固定的定子的电抗变化而产生的电信号进行计数(累积)而检测旋转角度的装置,并非检测从特定的原点起的角度即绝对角度,因此在设定有预定的模式的状态下对检测信号进行累计而求出的角度在其他模式下会成为与所述预定的模式下的角度不同的角度。以往,未着眼于这样利用旋转变压器来检测发动机的曲轴角时的技术课题、该课题的解决手段,在这一点上存在开发新的技术的余地。
[0013]
本发明以上述的情况为背景而完成,其目的在于,提供能够始终准确地检测构成为发动机转速与马达转速的关系被变更的混合动力车辆中的发动机的曲轴角的装置。
[0014]
用于解决课题的手段
[0015]
为了达成上述的目的,本发明是一种混合动力车辆的发动机的曲轴角检测装置,所述混合动力车辆具备:内燃机,具有曲轴;马达,具有通过旋转而输出信号的旋转角传感器;驱动轮;动力分割机构,与所述内燃机、所述马达及所述驱动轮连结且进行差动作用,所述混合动力车辆能够设定在将所述驱动轮的转速和所述马达的转速设为恒定的情况下的所述内燃机的转速相对于所述驱动轮的转速的比率不同的至少两个行驶模式,所述曲轴角检测装置的特征在于,具备基于所述旋转角传感器输出的所述信号来算出所述曲轴的旋转角即曲轴角,所述控制器对所述信号进行累计并且基于累计得到的累计值来算出曲轴角,判断是否从所述两个行驶模式中的第1模式切换为第2模式,在从所述第1模式切换为所述第2模式的判断成立的情况下,保持在所述第1模式下算出的所述曲轴角,将通过在切换为了所述第2模式的状态下对所述信号进行累计而算出的曲轴角与保持的所述曲轴角相加而算出所述曲轴角。
[0016]
在本发明中,可以是,所述控制器构成为,在从所述第1模式切换为了所述第2模式时将所述累计值零位复位并且在设定有所述第2模式的状态下新开始所述信号的累计,将基于新累计得到的累计值而得到的曲轴角与所述保持的曲轴角相加而算出曲轴角。
[0017]
在本发明中,可以是,所述控制器构成为,每当算出的所述曲轴角达到π弧度的整数倍的角度时,将算出的所述曲轴角复位成零。
[0018]
在本发明中,可以是,所述控制器具有在所述第1模式下算出所述曲轴角的运算式
和在所述第2模式下算出所述曲轴角的运算式,在从所述第1模式向所述第2模式的切换和所述曲轴角的零复位在时间上重叠的情况下,基于所述第2模式下的所述运算式而开始曲轴角的算出。
[0019]
在本发明中,可以是,所述行驶模式包括使所述内燃机的输出转矩以预定的放大率变化并向所述驱动轮传递的低速模式、以比所述预定的放大率小的放大率使所述内燃机的输出转矩变化并向所述驱动轮传递的高速模式及将所述发动机的输出转矩不增减而向所述驱动轮输出的固定模式,所述控制器构成为,在所述低速模式与所述高速模式之间切换行驶模式的情况下,在该切换的途中设定所述固定模式,在设定有所述固定模式的状态下,保持在切换前的行驶模式下算出的所述曲轴角,且将通过在切换后的行驶模式下对所述信号进行累计而算出的曲轴角与保持的所述曲轴角相加而算出所述曲轴角。
[0020]
在本发明中,可以是,所述马达包括输出相对于所述发动机输出的转矩的反作用力转矩的第1马达和对于向所述驱动轮传递的转矩加减转矩的第2马达,所述第1马达及所述第2马达分别具有旋转角传感器,所述控制器构成为,对所述第1马达的所述旋转角传感器和所述第2马达的旋转角传感器输出的信号进行累计,并且基于累计得到的累计值来算出所述曲轴角。
[0021]
在本发明中,可以是,所述动力分割机构具备:第1差动机构,通过连结有所述曲轴的第1输入要素、连结有所述第1马达的第1反作用力要素及第1输出要素来进行差动作用;第2差动机构,通过连结有所述第1输出要素的第2输入要素、连结有所述驱动轮的第2输出要素及第2反作用力要素来进行差动作用;第1接合机构,将所述第2差动机构中的至少任两个所述要素选择性地连结;及第2接合机构,将所述第2反作用力要素和所述曲轴选择性地连结,所述第2马达连结于所述第2输出要素。
[0022]
发明效果
[0023]
根据本发明,将发动机的曲轴角基于利用与发动机经由动力分割机构而连结的马达的旋转角传感器得到的信号来算出。因此,在将发动机输出的转矩利用马达转矩来调整并向驱动轮传递的情况下,能够将马达转矩的控制基于附设于该马达的转速传感器的检测信号来进行,因此能够尽可能减小马达转矩的控制的延迟。另外,在对该旋转角传感器的检测信号进行累积而算出曲轴角时模式发生了切换的情况下,即使伴随于此而算出的方法变化,也保持在模式的切换时间点下算出的曲轴角,对该保持的角度加上基于在新的模式下累积的信号的角度,因此能够不受模式的切换的影响而准确地算出曲轴角。
附图说明
[0024]
图1是示出能够应用本发明的曲轴角的检测装置的混合动力车中的动力传动系的一例的示意图。
[0025]
图2是用于说明电子控制装置(ecu)的结构的框图。
[0026]
图3是将各行驶模式下的离合器机构、制动器机构的接合及释放的状态、马达的运转状态、发动机的驱动的有无汇总示出的图表。
[0027]
图4是用于说明hv-hi模式下的动作状态的列线图。
[0028]
图5是用于说明hv-lo模式下的动作状态的列线图。
[0029]
图6是用于说明直接连结模式下的动作状态的列线图。
[0030]
图7是示意性地示出在累计旋转变压器角的过程中仅切换了曲轴角的运算式的情况(以往例)下的曲轴角运算值及各旋转变压器累计值的时间变化的线图。
[0031]
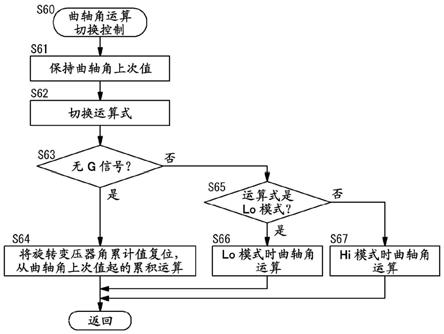
图8是用于说明由本发明的检测装置执行的控制的一部分的流程图。
[0032]
图9是用于说明由本发明的检测装置执行的控制的其他部分的流程图。
[0033]
图10是示意性地示出执行了本发明的检测装置的控制的情况下的曲轴角运算值及各旋转变压器累计值的时间变化的线图。
[0034]
标号说明
[0035]1…
混合动力车,2
…
前轮,3
…
发动机,4、5
…
马达,6
…
曲轴,7
…
动力分割机构,8
…
分割部,9
…
变速部,10
…
太阳轮,11
…
齿圈,12
…
小齿轮,13
…
齿轮架,14
…
输入轴,15
…
太阳轮,16
…
齿圈,17
…
小齿轮,18
…
齿轮架,19
…
输出齿轮,20
…
副轴,21
…
从动齿轮,22
…
驱动齿轮,23
…
差速齿轮单元,24
…
齿圈,25
…
转子轴,26
…
驱动齿轮,27
…
驱动轴,28
…
旋转变压器,29
…
旋转变压器,30
…
马达控制器,31
…
马达控制器,32
…
蓄电装置,θe
…
曲轴角,θmg1、θmg2
…
累计值,b
…
制动器机构,cl1、cl2
…
离合器机构。
具体实施方式
[0036]
本发明的实施方式中的曲轴角的检测装置将除了具有曲轴的内燃机(以下,记为发动机)之外还具备马达作为驱动力源的混合动力车设为对象。尤其是,可以是构成为发动机和马达经由预定的传动机构而连结且将发动机输出的转矩利用马达的转矩来调整或控制从而抑制驱动转矩的振动或脉动的混合动力车。另外,本发明的实施方式中的混合动力车是能够将预定的行驶状态下的发动机转速或发动机转速相对于驱动轮的转速的比率高低变更的混合动力车。即,可以是所谓的具备多个行驶模式的混合动力车。
[0037]
图1示意性地示出了这种混合动力车1中的动力传动系,这里所示的例子是以左右的前轮2为驱动轮的混合动力车1的例子。作为驱动力源,具备发动机3和两个马达4、5。该发动机3是所谓的往复式发动机且具有曲轴6。该曲轴6连结于动力分割机构7。动力分割机构7是构成为将发动机3输出的转矩的一部分向驱动轮即前轮2传递而将发动机3输出的转矩的其他部分变换为电力并利用此时的反作用力转矩来控制发动机3的转速的差动机构。
[0038]
在图1所示的例子中,动力分割机构7主要由分割转矩的分割部8和变速部9构成。分割部8是通过三个旋转要素来进行差动作用的结构即可,能够由行星齿轮机构构成。在图1所示的例子中,由单小齿轮型的行星齿轮机构构成。该行星齿轮机构由太阳轮10、相对于太阳轮10配置于同心圆上的作为内齿齿轮的齿圈11、配置于这些太阳轮10与齿圈11之间且与太阳轮10和齿圈11啮合的小齿轮12及将小齿轮12保持为能够自转及公转的齿轮架13构成。该太阳轮10主要作为反作用力要素发挥功能,齿圈11主要作为输出要素发挥功能,齿轮架13主要作为输入要素发挥功能。此外,该行星齿轮机构相当于本发明的实施方式中的第1差动机构。
[0039]
在发动机3的曲轴6连结有动力分割机构7的输入轴14,该输入轴14连结于齿轮架13。此外,也可以取代将齿轮架13与输入轴14直接连结的结构,经由齿轮机构等传动机构(未图示)而将齿轮架13与输入轴14连结。另外,也可以在该曲轴6与输入轴14之间配置阻尼器机构、变矩器等机构(分别未图示)。
[0040]
在太阳轮10连结有第1马达4。在图1所示的例子中,分割部8及第1马达4配置于与
发动机3的旋转中心轴线相同的轴线上,第1马达4隔着分割部8而配置于与发动机3相反的一侧。在该分割部8与发动机3之间,在与这些分割部8及发动机3同一轴线上,以在该轴线的方向上并列的方式配置有变速部9。
[0041]
变速部9是与上述的分割部8中的行星齿轮机构一起构成复合行星齿轮机构的差动机构,在图1所示的例子中由单小齿轮型的行星齿轮机构构成。因此,该行星齿轮机构是以下的差动机构:具有太阳轮15、相对于太阳轮15配置于同心圆上的作为内齿齿轮的齿圈16、配置于这些太阳轮15与齿圈16之间且与这些太阳轮15及齿圈16啮合的小齿轮17及将小齿轮17保持为能够自转及公转的齿轮架18,通过太阳轮15、齿圈16及齿轮架18这三个旋转要素来进行差动作用。在该变速部9中的太阳轮15连结有分割部8中的齿圈11。另外,在变速部9中的齿圈16连结有输出齿轮19。因此,太阳轮15成为了输入要素,齿圈16成为了输出要素,齿轮架18成为了反作用力要素。此外,该行星齿轮机构相当于本发明的实施方式中的第2差动机构。
[0042]
设置有将构成上述的分割部8的行星齿轮机构中的预定的旋转要素与构成变速部9的行星齿轮机构中的预定的旋转要素选择性地连结的接合机构。在图1所示的例子中,设置有将变速部9中的齿轮架18与分割部8中的齿轮架13选择性地连结的第1离合器机构cl1和将变速部9中的至少任两个旋转要素(具体而言是齿圈16和齿轮架18)选择性地连结的第2离合器机构cl2。这些离合器机构cl1、cl2可以是湿式多片离合器等摩擦式的离合器机构,或者也可以是牙嵌离合器等啮合式的离合器机构。
[0043]
通过使该第1离合器机构cl1接合,分割部8中的齿轮架13与变速部9中的齿轮架18连结,形成“分割部8中的齿轮架13和变速部9中的齿轮架18成为了输入要素,另外,分割部8中的太阳轮10成为了反作用力要素,而且,变速部9中的齿圈16成为了输出要素”的复合行星齿轮机构。另外,第2离合器机构cl2是用于使变速部9的整体一体化的接合机构。因此,在图1所示的动力传动系中,能够设定使第1离合器机构cl1接合而得到的lo模式、使第2离合器机构cl2接合而得到的hi模式、使两个离合器机构cl1、cl2均接合而得到的直接连结模式(固定模式)这至少三个行驶模式。
[0044]
与上述的发动机3、分割部8或变速部9的旋转中心轴线平行地配置有副轴20。与所述输出齿轮19啮合的从动齿轮21安装于该副轴20。另外,在副轴20安装有驱动齿轮22,该驱动齿轮22与作为最终减速机的差速齿轮单元23中的齿圈24啮合。而且,在所述从动齿轮21啮合有安装于第2马达5中的转子轴25的驱动齿轮26。因此,构成为将第2马达5输出的动力或转矩在上述的从动齿轮21的部分处与从所述输出齿轮19输出的动力或转矩叠加。构成为将这样合成后的动力或转矩从差速齿轮单元23经由左右的驱动轴27而向前轮2传递。
[0045]
如前所述,通过相对于发动机转矩而利用第1马达4使反作用力转矩作用,发动机转矩作为驱动转矩而向前轮2传递。因此,若与此相反地使反作用力转矩从发动机3侧对第1马达4作用,则能够将第1马达4的输出转矩作为用于使混合动力车1行驶的驱动转矩而向前轮2传递。设置有产生这样的所谓的马达(ev)行驶用的反作用力的制动器机构b。制动器机构b构成为将前述的曲轴6或与其连结的输入轴14选择性地固定。此外,制动器机构b只要在第1马达4输出了转矩的情况下能够相对于该转矩而使反作用力转矩作用即可,不限于将曲轴6或输入轴14完全固定的结构,只要能够使要求的反作用力转矩向曲轴6或输入轴14作用即可。或者,也可以设置禁止曲轴6、输入轴14向与在发动机3的驱动时旋转的方向相反的方
向旋转的单向离合器作为制动器机构b。
[0046]
上述的第1马达4及第2马达5作为一例而是永磁体式的同步马达,作为检测其控制用的旋转角度(电角度)的旋转角传感器而附设有旋转变压器(resolver)28、29。旋转变压器28、29是构成为对因旋转的转子与固定的定子的电抗变化而产生的电信号进行计数(累积)而检测旋转角度的以往已知的传感器。即,由旋转变压器28、29检测的旋转角度是从将从旋转变压器28、29输出的信号的累积值(累计值)复位成零的位置(角度)起的相对角度。
[0047]
设置有用于控制第1马达4的转矩、转速的马达控制器30和用于控制第2马达5的转矩、转速的马达控制器31。这些马达控制器30、31具备变换器、转换器,构成为将从由锂离子电池、电容器等构成的蓄电装置32输出的电压、电流、频率适当变换并向各马达4、5供给,另外,将由任一马达4、5发电产生的电力的电压、电流、频率适当变换并向蓄电装置32充电。
[0048]
设置有用于控制上述的各马达控制器30、31、发动机3、各离合器机构cl1、cl2及制动器机构b的电子控制装置(ecu)33。该ecu33以微型计算机为主体而构成,构成为使用从包括前述的旋转变压器28、29的各种传感器输入的数据、预先存储的数据以及程序来进行运算,将该运算的结果作为控制指令信号而输出。图2是用于说明ecu33的结构的一例的框图。在图2所示的例子中,由统合ecu34、mg-ecu35、发动机ecu36及离合器ecu37构成了ecu33。
[0049]
统合ecu34构成为从搭载于车辆的各种传感器接受数据的输入,基于该输入的数据和预先存储的映射、运算式等来向mg-ecu35、发动机ecu36及离合器ecu37输出指令信号。将向统合ecu34输入的数据的一例示于图2,车速、加速器开度、相当于第1马达(mg1)4的转速的来自旋转变压器28的信号、相当于第2马达5(mg2)的转速的来自旋转变压器29的信号、发动机3的曲轴6的转速(发动机转速)、变速部9中的齿圈16或副轴20的转速即输出转速、在各离合器机构cl1、cl2、制动器机构b设置的活塞的行程量、蓄电装置32的温度、各马达控制器30、31的温度、第1马达4的温度、第2马达5的温度、对分割部8、变速部9等进行润滑的油(atf)的温度、蓄电装置32的充电余量(soc)等数据向统合ecu34输入。
[0050]
并且,基于输入到统合ecu34的数据等来求出第1马达4的运转状态(输出转矩、转速)、第2马达5的运转状态(输出转矩、转速)、发动机3的曲轴角等,将这些求出的数据作为指令信号而向mg-ecu35输出。同样,基于输入到统合ecu34的数据等来求出发动机3的运转状态(输出转矩、转速、曲轴角),将该求出的数据作为指令信号而向发动机ecu36输出。而且,基于输入到统合ecu34的数据等来求出各离合器机构cl1、cl2及制动器机构b的传递转矩容量(包括“0”),将这些求出的数据作为指令信号而向离合器ecu37输出。
[0051]
mg-ecu35基于如上述那样从统合ecu34输入的数据来求出应该向各马达4、5通电的电流值,并向各马达4、5输出指令信号。各马达4、5是交流式的马达,因此,上述的指令信号包括应该利用变换器生成的电流的频率、应该利用转换器升压的电压值等。
[0052]
发动机ecu36基于如上述那样从统合ecu34输入的数据来求出用于确定电子节气门的开度的电流、用于利用点火装置将燃料点火的电流、用于确定egr(exhaust gas recirculation:废气再循环)阀的开度的电流、用于确定进气门、排气门的开度的电流值等,向各个阀、装置输出指令信号。即,从发动机ecu36输出用于控制发动机3的输出(功率)、发动机3的输出转矩或发动机转速的指示信号。
[0053]
离合器ecu37基于如上述那样从统合ecu34输入的数据来求出应该向确定各离合器机构cl1、cl2及制动器机构b的接合压的致动器通电的电流值,向各致动器输出指令信
号。
[0054]
在上述的动力传动系中,能够设定利用由发动机3产生的动力或由发动机3消耗的动力来进行驱动行驶或制动行驶的混合动力(hv)行驶模式。而且,在hv行驶模式下,能够设定在使第1马达4以低转速旋转的情况(包括“0”旋转)下、与变速部9中的齿圈16的转速相比发动机3(或输入轴14)的转速成为高转速的hv-lo模式、与变速部9中的齿圈16的转速相比发动机3(或输入轴14)的转速成为低转速的hv-hi模式、及变速部9中的齿圈16的转速与发动机3(或输入轴14)的转速相同的直接连结(固定)模式。
[0055]
在hv-lo模式及hv-hi模式下,通过在行驶中使第1马达4的转速变化而发动机转速变化。即,发动机转速与齿圈16(或作为驱动轮的前轮2)的转速(输出转速)的比率即变速比(或转矩的放大率)变化。另外,换言之,hv-lo模式和hv-hi模式是将输出齿轮19或作为驱动轮的前轮2的转速和第1马达4的转速分别设为恒定的转速的情况下的输出齿轮19或作为驱动轮的前轮2的转速与发动机3的转速的比率不同的行驶模式。在hv-lo模式下,发动机3的转速与hv-hi模式下的发动机转速相比成为高转速,输出齿轮19的转矩变大。
[0056]
在上述的动力传动系中,还能够设定不利用发动机3的动力而从第1马达4、第2马达5输出转矩来行驶的ev行驶模式。该ev行驶模式能够设定从第1马达4及第2马达5输出驱动转矩的双模式和不从第1马达4输出驱动转矩而仅从第2马达5输出驱动转矩的单模式,双模式能够设定从第1马达4输出的转矩的放大率比较大的ev-lo模式和从第1马达4输出的转矩的放大率比较小的ev-hi模式。此外,在单模式下,可以是:在将第1离合器机构cl1接合的状态下仅从第2马达5输出驱动转矩而行驶,在将第2离合器机构cl2接合的状态下仅从第2马达5输出驱动转矩而行驶,或者在将各离合器机构cl1、cl2释放的状态下仅从第2马达5输出驱动转矩而行驶。
[0057]
这些各行驶模式通过控制第1离合器机构cl1、第2离合器机构cl2、制动器机构b及发动机3、各马达4、5而设定。在图3中,将这些行驶模式和各行驶模式下的第1离合器机构cl1、第2离合器机构cl2、制动器机构b的接合及释放的状态、第1马达4及第2马达5的运转状态、来自发动机3的驱动转矩的输出的有无的一例作为图表而示出。图中的
“●”
的符号表示接合的状态,
“-”
的符号表示释放的状态,“g”的符号表示主要作为发电机运转,“m”的符号表示主要作为马达运转,空栏表示不作为马达及发电机发挥功能或者第1马达4、第2马达5不为了驱动而参与的状态,“on”表示正从发动机3输出驱动转矩的状态,“off”表示不从发动机3输出驱动转矩的状态。此外,在单模式下的行驶中,能够利用发动机3使第1马达4旋转而发电,利用该电力来行驶,在这样将从发动机3输出的动力的全部变换为电能的情况下,发动机3不直接地产生驱动转矩,因此在图中表示为“off”。
[0058]
使用图4及图5所示的列线图来说明上述的hv-hi模式、hv-lo模式下的动作。列线图是将表示动力分割机构7中的各旋转要素的直线隔开齿轮比的间隔而互相平行地画出并将从与这些直线正交的基线起的距离表示为各旋转要素的转速的图。另外,在图4及图5中,将在发动机3中使空气和燃料的混合气燃烧而产生动力(即驱动转矩)的驱动行驶时的转矩的朝向利用实线表示,将使燃料向发动机3的供给停止等且通过带动发动机3旋转而由发动机3消耗动力即产生发动机制动转矩的制动行驶时的转矩的朝向利用虚线表示。
[0059]
在设定了hv-hi模式、hv-lo模式的驱动行驶时,如图4及图5的实线所示,从发动机3输出驱动转矩(正转矩),将第1离合器机构cl1和第2离合器机构cl2中的任一方接合,并且
从第1马达4输出用于抑制发动机转速的增加的反作用力转矩,由此,与从发动机3输出的驱动转矩相应的转矩从动力分割机构7输出。从该动力分割机构7输出的转矩在hv-hi模式和hv-lo模式下不同。换言之,从发动机3输出的转矩中的向动力分割机构7中的齿圈16侧传递的转矩的比例不同。
[0060]
在从发动机3输出驱动转矩且从第1马达4输出反作用力转矩的情况下,以使发动机转速成为目标转速的方式控制第1马达4的转速。例如,若是驱动行驶时,则以使考虑了发动机3的燃料经济性、第1马达4的驱动效率等的动力传动系整体的效率(将消耗能量除以前轮2的能量而得到的值)最好的方式确定该发动机3的目标转速。此外,上述的第1马达4的转速能够连续地变化,基于该第1马达4的转速和车速而发动机转速确定。因此,动力分割机构7作为无级变速机发挥功能。
[0061]
在通过在上述的驱动行驶时从第1马达4输出反作用力转矩而第1马达4作为发电机发挥功能的情况下,发动机3的动力的一部分由第1马达4变换为电能。并且,从发动机3的动力除去由第1马达4变换为电能的动力量后的动力向变速部9中的齿圈16传递。另外,由第1马达4发电产生的电力向第2马达5供给。在该情况下,根据需要,充入蓄电装置32的电力也向第2马达5供给。
[0062]
在直接连结模式下,各离合器机构cl1、cl2接合,因此,如图6的列线图所示,动力分割机构7中的各旋转要素以同一转速旋转。即,发动机3的动力的全部从动力分割机构7输出。换言之,发动机3的动力的一部分不会由第1马达4、第2马达5变换为电能。
[0063]
上述的各行驶模式根据车速和要求驱动力(例如,加速器踏板的踩踏角度即加速器开度)而选择,该控制基于将设定各行驶模式的区域、车速及要求驱动力作为参数而确定的映射来进行。关于各行驶模式的区域,概略地说,越是低车速且要求驱动力大的高负荷,则越容易设定lo模式,另外相反,越是高车速且低负荷,则越容易设定hi模式。因此,因车速变化或者加速器开度变化而将行驶模式在lo模式与hi模式之间切换。在该情况下,在这些行驶模式下接合的离合器机构cl1、cl2不同,相对于此,在直接连结模式下,使双方的离合器机构cl1、cl2接合,因此,在lo模式与hi模式之间切换行驶模式的情况下,一度设定直接连结模式。
[0064]
在上述的动力传动系中,发动机3和各马达4、5经由动力分割机构7而互相连结,而且各马达4、5也具有高的转矩控制响应性,因此能够将从发动机3向输出齿轮19或前轮2传递的转矩利用马达4、5的转矩而及时地增减。利用这样的功能,进行将发动机转矩的振动或脉动(以下,简记为振动)利用马达4、5来抑制的减振控制。即,通过将相对于发动机转矩的振动错开了相位的转矩利用马达4、5输出而驱动转矩的振动变小。为了这样控制马达4、5的转矩,需要进行与发动机转矩的振动相应的转矩控制。发动机转矩的振动因发动机3中的混合气的间歇性的燃烧而产生,该间歇性的燃烧的正时能够通过曲轴角而得知。
[0065]
本发明的实施方式中的曲轴角的检测装置构成为将上述的马达转矩的控制用的曲轴角基于附设于马达4、5的旋转角传感器即旋转变压器28、29的检测信号来检测。在使任一离合器机构cl1、cl2接合且将制动器机构b释放而行驶的状态下,发动机3及各马达4、5旋转,在这些发动机3与各马达4、5的转速之间,根据存在将它们连结的传动机构的上述的动力分割机构7的结构而确定的关系成立。若将该关系利用曲轴角θe和各马达4、5的旋转角θmg1、θmg2来表示,则是以下这样。hi模式下的曲轴角θe(θh)是
[0066]
θe=θh={ρ1/(1+ρ1)}θmg1+{1/(1+ρ1)}θmg2,
[0067]
lo模式下的曲轴角θe(θl)是
[0068]
θe=θl={ρ1
·
ρ2/(1-ρ1
·
ρ2)}θmg1+{1/(1-ρ1
·
ρ2)}θmg2。
[0069]
在此,ρ1是构成前述的分割部8的行星齿轮机构的齿轮比(太阳轮10与齿圈1的齿数的比率),ρ2是构成前述的变速部9的行星齿轮机构的齿轮比(太阳轮15与齿圈16的齿数的比率),另外,θmg1是从第1马达4中的旋转变压器28输出的信号的累积值(计数值),θmg2是从第2马达5中的旋转变压器29输出的信号的累积值(计数值)。
[0070]
前述的ecu33(尤其是mg-ecu35)预先存储有上述的运算式,对从旋转变压器28、29输入的信号进行计数并将其累积值向上述的式子代入来检测发动机3的曲轴角θe。由于在曲轴角θe与发动机转矩的振动(振动的相位)之间存在相关关系,所以通过根据检测到的曲轴角θe而使马达转矩的大小变化,即,通过使马达转矩相对于发动机转矩的振动错开相位而振动,来使转矩的振动降低。这样的马达转矩的控制基于在发出马达转矩的指令信号的mg-ecu35中算出的曲轴角θe来进行,因而不将曲轴角θe在控制装置彼此之间传送,因此能够避免或抑制控制的延迟而进行振动抑制用的精度好的转矩控制。
[0071]
另一方面,在搭载有图1所示的动力传动系的混合动力车1中,若由车速、要求驱动力等确定的行驶状态变化,则行驶模式切换。例如,若在正以hv-hi模式行驶的状态下要求驱动力增大,则行驶模式从hv-hi模式切换为hv-lo模式。伴随于此而变更求出曲轴角θe的上述的式子。在该情况下,若仅进行了式子的变更,则检测的曲轴角θe会从实际的角度偏离。参照图7来说明该状况。
[0072]
图7示出了从正以hi模式行驶的状态切换为lo模式的情况下的通过上述的式子算出的曲轴角运算值、g信号、基于从旋转变压器28输出的信号而求出的第1马达4(mg1)的旋转变压器角累计值及基于从旋转变压器29输出的信号而求出的第2马达5(mg2)的旋转变压器角累计值的时间变化。此外,g信号是用于将各运算值及累计值复位成零的信号,由于在发动机3中每隔预定转数而使混合气燃烧,所以是每隔π弧度的整数倍的预先确定的角度而输出的信号。在发动机3是4循环发动机的情况下,g信号每隔720度而输出。该g信号由发动机ecu36检测曲轴角而输出,向mg-ecu35传送。此外,优选为了消除或抑制伴随于进行信号的累积或累计的误差的累积而进行零复位,该零复位用的信号适当根据需要而采用即可,也可以是上述的g信号以外的信号。
[0073]
在图7中,通过混合动力车1行驶而各旋转变压器28、29连续地输出信号,其累计值随着时间的经过而增大,每当发出g信号时被复位成零。曲轴角θe也同样地随着时间的经过而增大,每当发出g信号时被复位成零。在该过程的g信号输出后,在对旋转变压器28、29的输出信号进行累计而运算曲轴角θe的途中的t0时间点下,若从hi模式切换为lo模式,根据此而变更曲轴角θe的运算式,则曲轴角运算值如图7所示那样阶段性地变化。前述的曲轴角θe的运算式中的关于各马达4、5的旋转角即各旋转变压器28、29的累计值θmg1、θmg2的系数在hi模式下的运算式中比lo模式下的运算式中大。因此,若伴随于行驶模式的切换而变更运算式,则尽管曲轴6是从前不变的旋转角度,算出的曲轴角θe却会变化为小的值。即,在曲轴角θe的检测中产生错误。
[0074]
本发明的实施方式中的曲轴角的检测装置构成为,执行以下说明的控制,以避免产生行驶模式切换时的曲轴角θe的检测的错误。图8及图9是用于说明该控制的一例的流程
图,在混合动力车1正以前述的hv模式行驶的状态下,由前述的ecu33每隔预定的短时间反复执行。因此,ecu33相当于本发明的实施方式中的控制器。
[0075]
在图8中,首先,判断是否存在行驶模式的切换(hi/lo切换)要求(步骤s1)。在该步骤s2中作出了否定判断的情况下,维持从前的行驶模式,因此例如判断当前的行驶模式是否是lo模式(步骤s2)。此外,在该步骤s2中,也可以判断是否是hi模式。
[0076]
在步骤s2中判断为是lo模式的情况下,执行lo模式下的曲轴角的运算(步骤s3),之后,返回。该步骤s3的控制是以下控制:使用前述的求出lo模式下的曲轴角θe(θl)的运算式,将各旋转变压器28、29的信号的累计值θmg1、θmg2向该运算式代入而算出曲轴角θe(θl)。相对于此,在步骤s2中判断为是hi模式的情况下,执行hi模式下的曲轴角的运算(步骤s4),之后,返回。该步骤s4的控制是以下控制:使用前述的求出hi模式下的曲轴角θe(θh)的运算式,将各旋转变压器28、29的信号的累计值θmg1、θmg2向该运算式代入而算出曲轴角θe(θh)。
[0077]
另一方面,在步骤s1中作出了肯定判断的情况下,即,在产生了行驶模式的切换要求的情况下,判断是否是固定(直接连结)模式中(步骤s5)。如前所述,在这里说明的实施方式中,hi模式与lo模式之间的切换经由使两个离合器机构cl1、cl2均接合的固定模式而进行,因此,在步骤s5中,进行在该切换的过程中设定有固定模式的确认。此外,步骤s5中的固定模式的判断概括而言是切换行驶模式的状态是否成立的判断,因此,只要是能得知切换行驶模式的状态成立即可,也可以进行与是否是固定模式中的判断不同的判断。
[0078]
在该步骤s5中作出了否定判断的情况下的状态是行驶模式的切换未开始或者行驶模式已经切换,所以进入上述的步骤s2,判断该时间点的行驶模式。相对于此,在因成为了固定模式而在步骤s5中作出了肯定判断的情况下,执行切换曲轴角的运算的控制(步骤s6),之后,返回。
[0079]
将在该步骤s6中执行的切换控制的一例在图9中利用流程图示出。在图9所示的控制例中,首先,保持(存储)曲轴角上次值(步骤s61)。在此,曲轴角的上次值是通过在即将切换之前的行驶模式下使用的运算式而得到的曲轴角θe。接着,切换算出曲轴角的运算式(步骤s62)。即,将用于求出曲轴角的运算式切换为与切换后的行驶模式对应的运算式。即使切换运算式,由于保持着曲轴角的上次值,所以通过采用该上次值,也不会在曲轴角的算出中产生错误。之后,通过将新算出的角度与上述的上次值相加来检测曲轴角θe。
[0080]
即,在图9所示的例子中,判断是否没有g信号(步骤s63)。在因没有g信号而在步骤s63中作出了肯定判断的情况即运算式的切换和g信号在时间上重叠的情况下,通过将利用切换后的运算式和新的旋转变压器角累计值求出的角度与旋转变压器角上次值相加(累积)来算出曲轴角θe(步骤s64)。之后,返回。在此,新的旋转变压器角累计值是在切换运算式后对旋转变压器28、29所输入的信号进行计数而得到的角度值,实质上是从零开始的值。因此,在图9所示的例子中,将旋转变压器角累计值复位成零。取代于此,也可以预先存储运算式的切换时间点的旋转变压器角累计值,从自运算式的切换的以前起持续累计的值减去该存储值而求出新的旋转变压器角累计值(计数值)。
[0081]
这样,在本发明的实施方式中,在切换了曲轴角的运算式的时间点下,不采用通过切换后的运算式求出的角度,而将之前紧挨着(最近)的上次值保持为曲轴角,因此不会产生由切换运算式引起的曲轴角的运算值与实际的角度的误差。另外,在切换行驶模式后,通
过与该行驶模式相应的运算式来新求出角度,将该新求出的角度与上述的上次值相加(累积)来检测曲轴角,因此不会产生曲轴角的运算值与实际值的误差,能够准确地检测曲轴角θe。
[0082]
此外,在因存在g信号而在步骤s63中作出了否定判断的情况下,利用配合行驶模式的切换而切换后的运算式来算出曲轴角。例如判断在曲轴角的检测中使用的运算式是否是lo模式的运算式(步骤s65)。在该步骤s65中作出了肯定判断的情况下,运算lo模式下的曲轴角(步骤s66)。之后,返回。在与此相反而在步骤s65中作出了否定判断的情况下,运算hi模式下的曲轴角(步骤s67)。之后,返回。
[0083]
将执行了上述的步骤s64中的控制的情况下的通过前述的式子而算出的曲轴角运算值、g信号、基于从旋转变压器28输出的信号而求出的第1马达4(mg1)的旋转变压器角累计值及基于从旋转变压器29输出的信号而求出的第2马达5(mg2)的旋转变压器角累计值的时间变化示于图10。图10示出了从正以hi模式行驶的状态切换为lo模式的情况下的变化,在正以hi模式行驶的状态下,通过对从各旋转变压器28、29输出的信号进行累计而旋转变压器角累计值逐次增大,伴随于此而曲轴角运算值逐次增大。并且,通过发出g信号,各累计值及运算值被复位成零。
[0084]
若在基于g信号而复位成零后的预定时间点t1下产生伴随于行驶模式的切换要求的运算式的切换,则保持该时间点的曲轴角运算值。同时,各旋转变压器角累计值被复位成零。然后,新基于旋转变压器28、29的信号而逐次累计旋转变压器角。通过该新的累计值和切换后的运算式而算出的曲轴角运算值向在t1时间点下保持的运算值(上次值)相加。因此,在图10中以向右上升的方式增大的各旋转变压器角累计值在t1时间点下恢复为零,之后新以向右上升的方式逐渐增大,但由于曲轴角运算值是对在t1时间点下保持的值依次相加新运算出的值,所以曲轴角运算值与t1时间点以前的状态同样地以向右上升的方式继续增大。这与曲轴6正在继续旋转相吻合,从这一点也能显然可知,能够将曲轴角与运算式的切换无关地准确地检测。
[0085]
此外,本发明不限定于上述的具体例,能够应用于具备图1所示的动力传动系以外的动力传动系的混合动力车辆的曲轴角的检测装置。因此,能够切换而设定的行驶模式不限于前述的行驶模式,也可以是它们以上的多种多样的行驶模式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1