用于操控车辆的稳定器装置的方法和设备与流程
[0001]
本发明涉及用于操控车辆的稳定器装置的一种方法和一种设备。
背景技术:
[0002]
当在弯道或不平坦的车道中行驶时,车辆可能产生侧倾。可以使用稳定器来减小这种侧倾。
[0003]
de 10 2013 203 442 a1公开了一种用于操控设置在双轨迹车辆的车辆底盘上的、分开的横向稳定器上的电动伺服马达的方法,分开的横向稳定器的两个半部可以借助该电动伺服马达相互扭转。在故障情况下这样进行操控,即,使得横向稳定器的行为就像没有分开的、被动的横向稳定器那样。
技术实现要素:
[0004]
在此背景下,本发明提供根据主权利要求的用于操控车辆的稳定器装置的一种改进的方法和一种改进的设备。有利的设计方案自从属权利要求和以下说明中得出。
[0005]
如果在操控稳定器装置时考虑理论状态与实际状态之间的偏差,则可以改进车辆的侧倾行为。这种偏差例如可能由老化效果或制造公差而引起。
[0006]
一种用于操控车辆的稳定器装置的方法包括以下步骤:
[0007]
确定反侧倾力矩的理论值与实际值之间的偏差,在所述车辆的预先限定的行驶状况期间,由用于对所述车辆进行主动侧倾稳定的所述稳定器装置来施加所述反侧倾力矩;并且
[0008]
使用在所述确定的步骤中所确定的偏差来产生操控信号,其中所述操控信号被设计为用于操控所述稳定器装置以施加考虑到所述偏差的反侧倾力矩。
[0009]
车辆可以是陆地车辆,例如乘用机动车辆或载重机动车辆。“侧倾”可以理解为车辆绕车辆的纵向轴线的旋转运动。在侧倾时,侧倾力矩可能作用于车辆的单独的车桥。“车桥”可以是车辆的前车桥和后车桥。侧倾可以被适合的反力矩或反倾侧力矩消除,该反力矩或反侧倾力矩例如可以由车辆的稳定器装置施加或生成或者通过指配给车辆的单独的车桥的稳定器装置的共同作用而施加或者生成。作为稳定器装置,可以使用已知的主动稳定器,该主动稳定器例如包括扭杆弹簧或指配给车轮的可调的弹簧系统。通过所提及的反侧倾力矩可以对车辆的侧倾加阻尼。通过加阻尼,可以减小或消除侧倾。“侧倾运动”例如可以是侧倾速度或侧倾加速度或运动信号(从该运动信号可以推断出侧倾运动)。在预先限定的行驶状况下,车辆可以处于运动或行驶中,例如处于直线行驶中。稳定器装置可以具有扭杆,这些扭杆可以通过稳定器装置的马达任选地藉由稳定器装置的传动装置而相对于彼此扭转某一扭转角度。操控信号可以被设计为用于影响作为调整变量的扭转角度。可以在存在预先限定的行驶状况时实施确定的步骤。
[0010]
例如,为了操控稳定器装置,可以使用算法来计算具有主动侧倾稳定的底盘中的动态偏移。在此,不同于通过用相对车轮跳动(水平_车轮向左-水平_车轮向右)进行位置控
制的对主动侧倾稳定器的常规解除联接,可以实现在制造带宽度以及使用寿命上在从相对车轮跳动到主动侧倾稳定的执行器角度的传递功能方面有利地避免滞后性和公差。因此,例如可以减小或消除在操控主动侧倾稳定时的不精确性,尤其其方式为:在算法或学习算法中,在特定的行驶状况期间(例如在直线滑行时)对理论稳定器力矩和实际稳定器力矩进行相互比较。这样确定的偏差例如可以藉由积分算法进行积分,并且尤其可以考虑为相对车轮跳动(radhub)中的偏移。有利地,例如可以因此提高进行位置控制时(尤其在稳定器力矩较小的情况下)的控制精确性。
[0011]
可以重复地实施对理论值与实际值之间偏差进行确定的步骤,以确定至少一个另外的偏差。因此可以以简单的方式生成或者确定偏差的曲线。在这个基础上可以在需要时进行再调整。
[0012]
在此,所述方法可以具有使用在所述确定的步骤中所确定的偏差和借助于运算规则和预先限定的力矩模型的至少一个另外的偏差来运算偏移值的步骤。在此,在所述产生的步骤中,可以使用在所述运算的步骤中算出的偏移值来产生所述操控信号。还可以重复地实施运算的步骤。因此可以随着时间而最小化或消除理论值与实际值之间的偏差。
[0013]
尤其,在此,在所述运算的步骤中,可以使用算法作为运算规则,所述算法具有对在所述确定的步骤中所确定的偏差和至少一个另外的偏差的积分。因此可以以特别简单并且计算高效的方式来运算偏移值。
[0014]
此外,在此,在所述力矩模型中,可以考虑所述稳定器装置的马达的马达力矩和所述稳定器装置的传动装置的传动比。以这种方式可以实现对简单并且计算高效的稳定器力矩模型的简单并且稳健的利用。
[0015]
即使在运算的步骤中算出的偏移值超过阈值,该方法也可以具有提供诊断信号的步骤。在此,诊断信号可以表示车辆的潜在的机械功能故障。如果偏移值不可置信地变大,则可以识别到底盘中的变形(例如变形的联接杆等)并且可以用于机械诊断。因此可以实现可靠地检测底盘中的机械变形。
[0016]
此外,在此,在所述产生的步骤中所产生的操控信号可以被设计为:在所述稳定器装置方面,实现将在所述运算的步骤中算出的偏移值应用于所述稳定器装置的扭杆的扭转角度,并且额外地或替代性地实现在所述车辆的车轮的相对车轮跳动方面考虑在所述运算的步骤中算出的偏移值。以这种方式可以简单并且可靠地改进侧倾稳定。
[0017]
所述方法还可以具有使用借助于所述车辆的至少一个检测装置所检测的所述车辆的行驶数据来识别预先限定的行驶状况的步骤。尤其,如果识别的步骤识别到预先限定的行驶状况,则在此可以实施确定的步骤和(任选地、额外地)运算的步骤。可以重复地实施识别的步骤,以便还识别预先限定的行驶状况的结束。因此可以借助行驶动态变量(例如横向加速度、横向急动度、转向角度、转向角速度、偏转速率、偏转加速度等)并且额外地或替代性地借助系统变量(例如马达转速、理论马达力矩、实际马达力矩、理论稳定器力矩、实际稳定器力矩等)作为行驶数据将学习算法的使用限制于预先限定的行驶状况。该至少一个检测装置可以被设计为用于检测至少一个上文提及的行驶动态变量以及(额外地或替代性地)系统变量作为行驶数据。
[0018]
有利地,可以使用用于操控车辆的稳定器装置的设备来执行对应方法的步骤。为此,设备例如可以包括确定装置和产生装置。任选地,设备还可以包括提供装置以及(额外
地或替代性地)识别装置。这种设备可以是电子仪器,该电子仪器处理电子信号(例如传感器信号)并且取决于这些电子信号来输出控制信号。该设备可以具有一个或多个适合的接口,这些接口可以被设计为硬件方面的和/或软件方面的。在硬件方面的设计中,接口例如可以是实施设备的功能的集成电路的一部分。接口还可以是固有的集成回路或者至少部分地由离散的部件构成。在软件方面的设计中,接口可以是软件模块,这些软件模块例如除了其他的软件模块之外存在于微型控制器上。根据不同的实施方式,该设备可以包括稳定器装置或者与对应的稳定器装置联接。对应地,该设备可以包括用于提供操控信号的一个或多个传感器装置和/或处理装置,或者包括与对应的装置的接口。
[0019]
还有利的是一种计算机程序产品,该计算机程序产品具有程序代码,该程序代码可以被存储在机器可读的载体(例如半导体存储器、硬盘存储器或光学存储器)中,并且当在计算机或设备上实施程序时,该程序代码被用于执行上述实施方式所述的方法。
附图说明
[0020]
借助于附图示例性地更详细地解释本发明。在附图中:
[0021]
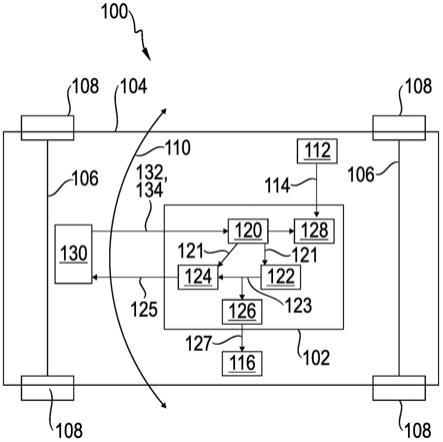
图1示出车辆的示意图,该车辆具有根据一个实施例的用于操控稳定器装置的设备;
[0022]
图2示出车辆的示意图,该车辆具有根据一个实施例的用于操控稳定器装置的设备;并且
[0023]
图3示出根据一个实施例的用于操控稳定器装置的方法的流程图。
[0024]
在本发明的优选实施例的以下说明中,在不同的图中所展示的并且类似作用的元件使用相同或类似的附图标记,其中省去对这些元件的重复性描述。
具体实施方式
[0025]
图1示出车辆100的示意图,该车辆具有根据一个实施例的用于操控车辆100的稳定器装置130的设备102。车辆100示例性地被实施为具有各自有两个车轮108的两个车桥106的两车桥式的车辆100。
[0026]
车辆100具有横向轴线、纵向轴线和竖直轴线。纵向轴线在此被定向成横向于车桥106。当车辆100的结构104(例如由于转弯行驶)产生侧倾时,结构104实施呈绕纵向轴线旋转运动的形式的侧倾运动。在此产生的侧倾力矩分布在车桥106上。
[0027]
设备102或操控设备102或控制设备102被设计为用于操控稳定器装置130,对结构104以及因此车辆100的侧倾加阻尼,或者减小或消除侧倾。为此,通过从设备102方面借助于稳定器装置130的操控产生反侧倾力矩110,该反侧倾力矩对结构104的侧倾加阻尼。通过用于对车辆100进行主动侧倾稳定的稳定器装置130来施加反侧倾力矩110。设备102使得能够实施用于操控车辆的稳定器装置的方法,例如在图3中展示了该方法。
[0028]
设备102具有确定装置120和产生装置124。确定装置120被设计为用于在车辆100的预先限定的行驶状况期间确定反侧倾力矩110的理论值132与实际值134之间的偏差121。为此,设备102被设计为用于读取例如稳定器装置130的理论值132和实际值134。确定装置120尤其被设计为用于重复地执行确定,以确定至少一个另外的偏差121。设备102的产生装置124被设计为用于使用借助于确定装置120所确定的偏差121来产生用于操控稳定器装置
130的操控信号125。操控信号125被设计为用于操控稳定器装置130以施加考虑到偏差121的反侧倾力矩110。设备102为此还被设计为用于经由接口将操控信号125输出给稳定器装置130或者为了输出而将其提供给稳定器装置。
[0029]
根据在此展示的实施例,设备102还包括运算装置122。运算装置122被设计为用于使用借助于确定装置120所确定的偏差121和借助于运算规则和预先限定的力矩模型的至少一个另外的偏差121来运算偏移值123。在此,产生装置124被设计为用于使用借助于运算装置122算出的偏移值123(尤其仅使用借助于运算装置122算出的偏移值123)来产生操控信号125。
[0030]
此外,根据在此展示的实施例,设备102包括提供装置126。提供装置126被设计为:当借助于运算装置122算出的偏移值123超过阈值时,就提供诊断信号127。诊断信号127表示车辆的潜在的机械功能故障。提供装置126被设计为用于执行在偏移值123与预先限定的阈值之间进行阈值比较。此外,提供装置126被设计为用于将诊断信号127输出给车辆100的诊断接口116。
[0031]
根据在此展示的实施例,设备102还包括识别装置128。识别装置128被设计为用于使用借助于车辆的至少一个检测装置112所检测的车辆100的行驶数据114来识别预先限定的行驶状况。设备102例如被设计为:当借助于识别装置128识别到预先限定的行驶状况时,激活确定装置120和产生装置124以及(根据在此展示的实施例)运算装置122和(任选地)提供装置126。随后还将更详细地探讨预先限定的行驶状况、预先限定的力矩模型和行驶数据114。
[0032]
预先限定的行驶状况是车辆100运动的行驶状况,例如是直线行驶或直线滑行。在此,反侧倾力矩110的理论力矩或理论值132例如为零牛顿米。现在,如果较小的剩余力矩作为偏差121作用在稳定器装置130上,则这个剩余力矩或这个偏差121尤其被进行积分并且作为偏移值123而纳入稳定器装置130的理论角度计算。由此减小剩余力矩并且减小控制偏差。一旦再次设定控制偏差,这就持续发生。尤其使用简单的稳定器力矩模型或预先限定的力矩模型。最简单的模型可以由马达力矩和传动比计算:m_稳定器实际=m_马达实际*i_传动装置*eta_传动装置。对于这个力矩模型,根据稳定器装置130的实施方式(例如具有或者不具有整合的解除联接元件)存在或多或少可以有利地利用的预先限定的行驶状况。基于有关这些预先限定的行驶状况的信息,可以借助行驶动态变量(例如横向加速度、横向急动度、转向角度、转向角速度、偏转速率、偏转加速度等)并且额外地或替代性地借助系统变量(例如马达转速、理论马达力矩、实际马达力矩、理论稳定器力矩、实际稳定器力矩等)作为行驶数据114将设备102的使用限制于特定的行驶状况。
[0033]
图2示出车辆100的示意图,该车辆具有根据一个实施例的用于操控车辆100的稳定器装置的设备102。在此,该实施例可以是借助图1所描述的车辆的实施例。纯示意图示出沿着车辆100的竖直轴线和横向轴线穿过车辆100的截面。
[0034]
示出了车辆的车桥106中的具有稳定器210的一个车桥,该稳定器可以是借助图1提及的稳定器装置的一部分。稳定器210是作为具有第一稳定器元件211和第二稳定器元件212的两部分式扭杆实现的。在此,第一稳定器元件211的一端与车辆100的第一车轮悬架元件213连接,并且第二稳定器元件212的一端与车辆100的第二车轮悬架元件214连接。例如,稳定器元件211、212的这些端在此被实施为(优选大致沿行驶方向弯折或弯曲的)臂,这些
臂借助于铰接式地支承的摆动支柱217、218分别与车轮悬架元件213、214连接。车轮悬架元件213、214例如是车辆100的相反布置的横向连杆。稳定器元件212、213各自借助于可以绕共用的旋转轴线d-d旋转的结构支承件219被紧固在底盘上或者被紧固在呈车辆100的车身形式的结构104上。旋转轴线d-d在此示例性地与车辆100的横向轴线相对应。
[0035]
稳定器元件211、213的分别朝向车辆100的车辆中心的一端与三相驱动装置220的至少一个用作致动器的电动马达机械联接。三相驱动装置220被设计为:使用控制信号或操控信号125或由此推导出的信号来使稳定器元件211、212反向地绕旋转轴线d-d扭转。在此,控制信号例如表示基于场定向控制(feldorientierten regelung)算出的信号。通过使稳定器元件211、212反向扭转而使车轮悬架元件213、214运动,并且可以抵抗车身的侧倾(例如在转弯行驶时)。根据一个实施例,车辆100配备有设备102,该设备连接至三相驱动装置220并且被设计为用于提供控制信号。
[0036]
图3示出根据一个实施例的用于操控车辆的稳定器装置的方法300的过程图。例如可以使用借助图1示出的设备来实施方法300。
[0037]
方法300具有确定的步骤310和产生的步骤320。在方法300中,在确定的步骤310中,在车辆的预先限定的行驶状况期间,确定反侧倾力矩的理论值与实际值之间的偏差,通过用于对车辆进行主动侧倾稳定的稳定器装置来施加该反倾侧力矩。在产生的步骤320中,使用在确定的步骤310所确定的偏差来产生操控信号,该操控信号被设计为用于操控稳定器装置以施加考虑到偏差的反侧倾力矩。
[0038]
根据一个实施例,重复地实施确定的步骤310,以确定至少一个另外的偏差。在此,方法300还具有使用在确定的步骤310中所确定的偏差和借助于运算规则和预先限定的力矩模型的至少一个另外的偏差来运算偏移值的步骤315。在此,在产生的步骤320中,使用在运算的步骤315中算出的偏移值(尤其仅使用在运算的步骤315中算出的偏移值)来产生操控信号。同样,任选地、重复地实施运算的步骤315。例如,在运算的步骤315中,使用算法作为运算规则,该算法具有对在确定的步骤中所确定的偏差和至少一个另外的偏差的积分。尤其还在运算的步骤315中使用的力矩模型中考虑稳定器装置的马达的马达力矩和稳定器装置的传动装置的传动比。同样,在此,在产生的步骤320中所产生的操控信号被设计为:在稳定器装置方面,实现将在运算的步骤315中算出的偏移值应用于稳定器装置的扭杆的扭转角度,并且/或者实现在车辆的车轮的相对车轮跳动方面考虑在运算的步骤中算出的偏移值。
[0039]
根据一个实施例,即使在运算的步骤315中算出的偏移值超过阈值,方法300在此任选地也具有提供诊断信号的步骤325。诊断信号表示车辆的潜在的机械功能故障。提供的步骤325可以在运算的步骤315之后实施。
[0040]
根据一个实施例,方法300具有使用借助于车辆的至少一个检测装置所检测的车辆的行驶数据来识别预先限定的行驶状况的步骤305。方法300的步骤310、315、320、325可以单独地或组合地取决于步骤305的结果来实施,即取决于是否识别到预先限定的行驶状况。
[0041]
附图标记清单
[0042]
100
ꢀꢀꢀꢀꢀꢀ
车辆
[0043]
102
ꢀꢀꢀꢀꢀꢀ
设备
[0044]
104
ꢀꢀꢀꢀꢀꢀ
结构
[0045]
106
ꢀꢀꢀꢀꢀꢀ
车桥
[0046]
108
ꢀꢀꢀꢀꢀꢀ
车轮
[0047]
110
ꢀꢀꢀꢀꢀꢀ
反侧倾力矩
[0048]
112
ꢀꢀꢀꢀꢀꢀ
检测装置
[0049]
114
ꢀꢀꢀꢀꢀꢀ
行驶数据
[0050]
116
ꢀꢀꢀꢀꢀꢀ
诊断接口
[0051]
120
ꢀꢀꢀꢀꢀꢀ
确定装置
[0052]
121
ꢀꢀꢀꢀꢀꢀ
偏差
[0053]
122
ꢀꢀꢀꢀꢀꢀ
运算装置
[0054]
123
ꢀꢀꢀꢀꢀꢀ
偏移值
[0055]
124
ꢀꢀꢀꢀꢀꢀ
产生装置
[0056]
125
ꢀꢀꢀꢀꢀꢀ
操控信号
[0057]
126
ꢀꢀꢀꢀꢀꢀ
提供装置
[0058]
127
ꢀꢀꢀꢀꢀꢀ
诊断信号
[0059]
128
ꢀꢀꢀꢀꢀꢀ
识别装置
[0060]
130
ꢀꢀꢀꢀꢀꢀ
稳定器装置
[0061]
132
ꢀꢀꢀꢀꢀꢀ
反侧倾力矩的理论值
[0062]
134
ꢀꢀꢀꢀꢀꢀ
反侧倾力矩的实际值
[0063]
210
ꢀꢀꢀꢀꢀꢀ
稳定器
[0064]
211
ꢀꢀꢀꢀꢀꢀ
第一稳定器元件
[0065]
212
ꢀꢀꢀꢀꢀꢀ
第二稳定器元件
[0066]
213
ꢀꢀꢀꢀꢀꢀ
第一车轮悬架元件
[0067]
214
ꢀꢀꢀꢀꢀꢀ
第二车轮悬架元件
[0068]
217
ꢀꢀꢀꢀꢀꢀ
第一摆动支柱
[0069]
218
ꢀꢀꢀꢀꢀ
第二摆动支柱
[0070]
219
ꢀꢀꢀꢀꢀ
结构支承件
[0071]
220
ꢀꢀꢀꢀꢀ
三相驱动装置
[0072]
d-d
ꢀꢀꢀꢀꢀ
旋转轴线
[0073]
300
ꢀꢀꢀꢀꢀ
操控方法
[0074]
305
ꢀꢀꢀꢀꢀ
识别的步骤
[0075]
310
ꢀꢀꢀꢀꢀ
确定的步骤
[0076]
315
ꢀꢀꢀꢀꢀ
运算的步骤
[0077]
320
ꢀꢀꢀꢀꢀ
产生的步骤
[0078]
325
ꢀꢀꢀꢀꢀ
提供的步骤
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1