用于控制自动驾驶的方法和装置与流程
用于控制自动驾驶的方法和装置
1.相关申请的交叉引用
2.本技术要求2020年4月29日提交的韩国专利申请no.10
‑
2020
‑
0052406的优先权和权益,其全部内容通过引用结合于本文中。
技术领域
3.本发明涉及控制自动驾驶车辆。
背景技术:
4.自动驾驶车辆需要一种能够适应性地应对驾驶期间实时变化的周围环境的能力。
5.为了批量生产和启动自动驾驶车辆,首先需要可靠的确定控制功能。
6.诸如大货车的商用车辆可以被单独驱动,也可以通过附接到商用车辆并具有各种尺寸的拖车进行操作。
7.大货车车身的长度和重量根据拖车是否附接到大货车而改变。
8.附接有拖车的大货车受到的车辆惯性和打滑的影响要大于普通轿车。相应地,当应用于普通轿车的纵向控制策略无变化地应用于商用车辆时,可能难以执行适合于商用车辆特性的最优纵向控制。
技术实现要素:
9.本发明的一个方面提供了一种用于控制自动驾驶的方法和装置。
10.本发明的另一个方面提供了这样一种用于控制自动驾驶的方法和装置,其能够执行纵向控制。
11.本发明的另一个方面提供了这样一种用于控制自动驾驶的方法和装置,其能够基于通过设置在自动驾驶车辆中的各种传感器获得的周围环境信息和车身信息,通过生成校正了误差的纵向控制所需值来改善纵向控制追踪性能,以将纵向控制所需值发送至下级控制器。
12.本发明所解决的技术问题不限于前面提及的问题,并且本发明所属领域的技术人员从以下描述将清楚地理解任何本文没有提及的其他技术问题。
13.根据本发明的一个方面,一种用于控制自动驾驶车辆的自动驾驶的方法可以包括:在自动驾驶模式下收集关于自动驾驶的感测信息;基于关于自动驾驶的感测信息来计算初始纵向控制值;基于自动驾驶的感测信息来校正初始纵向控制值;通过将校正后的纵向控制值发送至下级控制器来执行纵向驾驶控制。
14.根据实施方案,基于自动驾驶的感测信息来校正初始纵向控制值可以包括:基于下级控制器的输入或输出误差来激活控制器校正参数。
15.根据实施方案,基于下级控制器的输入或输出误差来激活控制器校正参数可以包括:测量下级控制器的所需加速度与输出加速度之间的输入或输出误差;将输入或输出误差与临界误差进行比较;当输入或输出误差超过临界误差作为比较结果时,激活控制器校
正参数,以将追踪性能保持在临界误差的范围内。
16.根据实施方案,基于自动驾驶的感测信息来校正初始纵向控制值可以包括:基于拖车是否附接至自动驾驶车辆来确定拖车校正参数。
17.根据实施方案,基于拖车是否附接至自动驾驶车辆来确定拖车校正参数可以包括:通过分析关于自动驾驶的感测信息来确定是否附接有拖车;根据确定结果,当附接有拖车时,基于关于自动驾驶的感测信息来计算拖车的规格;通过参考预先存储的拖车映射表来确定与计算出的拖车的规格相对应的拖车校正参数。
18.根据实施方案,基于自动驾驶的感测信息来校正初始纵向控制值可以包括:确定与驾驶环境相对应的驾驶环境校正参数。
19.根据实施方案,确定与驾驶环境相对应的驾驶环境校正参数可以包括:基于关于自动驾驶的感测信息来确定驾驶环境;针对所确定的驾驶环境来确定是否需要应用纵向控制参数;当需要应用纵向控制参数作为确定结果时,通过参考预先存储的驾驶环境映射表来确定与自动驾驶车辆的特性和所确定的驾驶环境相对应的驾驶环境校正参数。
20.根据实施方案,自动驾驶车辆的特性可以包括基于打滑和行为极限的针对每个车辆速度的加速度追踪性能。
21.根据实施方案,可以通过将控制器校正参数、拖车校正参数或驾驶环境校正参数的至少一个应用于初始纵向控制值来计算校正后的控制值。
22.根据实施方案,关于自动驾驶的感测信息可以包括:定位信息、精准地图信息、摄像机拍摄信息、雷达或激光雷达的感测信息、天气信息、行驶速度信息、关于识别出的驾驶员注视的信息、关于车辆内部故障的感测信息、关于按钮输入以解除自动驾驶的信息、关于方向盘的操作的感测信息或者关于加速或减速踏板的操作的感测信息的至少一个。
23.根据本发明的另一个发面,一种用于控制自动驾驶的装置(其包括各种传感器)可以包括:感测部、纵向控制值生成器、纵向控制参数校正器和下级控制器,所述感测部用于在自动驾驶模式下收集关于自动驾驶的感测信息;所述纵向控制值生成器用于基于关于自动驾驶的感测信息来计算初始纵向控制值;所述纵向控制参数校正器用于基于自动驾驶的感测信息来计算初始纵向控制值;所述下级控制器用于通过接收校正后的纵向控制值来控制纵向驾驶。
24.根据实施方案,纵向控制参数校正器可以包括输入或输出误差校正部,以基于下级控制器的输入或输出误差来激活控制器校正参数。
25.根据实施方案,输入或输出误差校正部可以包括:测量下级控制器的所需加速度与输出加速度之间的输入或输出误差;将输入或输出误差与临界误差进行比较;当输入或输出误差超过临界误差时,激活控制器校正参数,以将追踪性能保持在临界误差的范围内。
26.根据实施方案,纵向控制参数校正器可以包括第一参数校正部,以基于拖车是否附接至自动驾驶车辆来确定拖车校正参数。
27.根据实施方案,第一参数校正部可以通过分析关于自动驾驶的感测信息来确定是否附接有拖车;当附接有拖车时,基于关于自动驾驶的感测信息来计算拖车的规格;通过参考预先存储的拖车映射表来确定与计算出的拖车的规格相对应的拖车校正参数。
28.根据实施方案,纵向控制参数校正器可以包括第二参数校正部,以确定与驾驶环境相对应的驾驶环境校正参数。
29.根据实施方案,第二参数校正部可以基于关于自动驾驶的感测信息来确定驾驶环境;针对所确定的驾驶环境来确定是否需要应用纵向控制参数;当需要应用纵向控制参数时,通过参考预先存储的驾驶环境映射表来确定与自动驾驶车辆的特性和所确定的驾驶环境相对应的驾驶环境校正参数。
30.根据实施方案,自动驾驶车辆的特性可以包括基于打滑和行为极限的针对每个车辆速度的加速度追踪性能。
31.根据实施方案,可以通过将控制器校正参数、拖车校正参数或驾驶环境校正参数的至少一个应用于初始纵向控制值来计算校正后的控制值。
32.根据实施方案,关于自动驾驶的感测信息可以包括:定位信息、精准地图信息、摄像机拍摄信息、雷达或激光雷达的感测信息、天气信息、行驶速度信息、关于识别出的驾驶员注视的信息、关于车辆内部故障的感测信息、关于按钮输入以解除自动驾驶的信息、关于方向盘的操作的感测信息或者关于加速或减速踏板的操作的感测信息的至少一个。
33.本发明所解决的技术问题不限于前面提及的问题,并且本发明所属领域的技术人员从以下描述将清楚地理解任何本文没有提及的其他技术问题。
34.本发明提供了一种用于控制自动驾驶的方法和装置。
35.另外,本发明提供了这样一种用于控制自动驾驶的方法和装置,其能够在商用车辆中执行优化的纵向控制。
36.此外,本发明提供了这样一种用于控制自动驾驶的方法和装置,其能够通过生成纵向控制所需值来改善纵向控制追踪性能,基于通过设置在自动驾驶车辆中的各种传感器获得的周围环境信息和车身信息来校正误差,以将纵向控制所需值发送至下级控制器。
37.另外,根据本发明,可以通过优化纵向控制追踪性能的策略来预先防止由自动驾驶事故引起的法律冲突。
38.此外,根据本发明,可以改善对应于级别3的商用车辆的纵向自动驾驶性能。
39.另外,根据本发明,通过基于各种车辆规格和各种驾驶环境的参数映射表来适应性地应用纵向控制校正参数,从而改善纵向控制追踪性能并使维护成本最小化。
40.而且,可以提供通过本发明直接或间接理解的各种效果。
附图说明
41.为了可以很好地理解本发明,现在将参考所附附图通过给出示例的方式来描述其各种实施方案,在附图中:
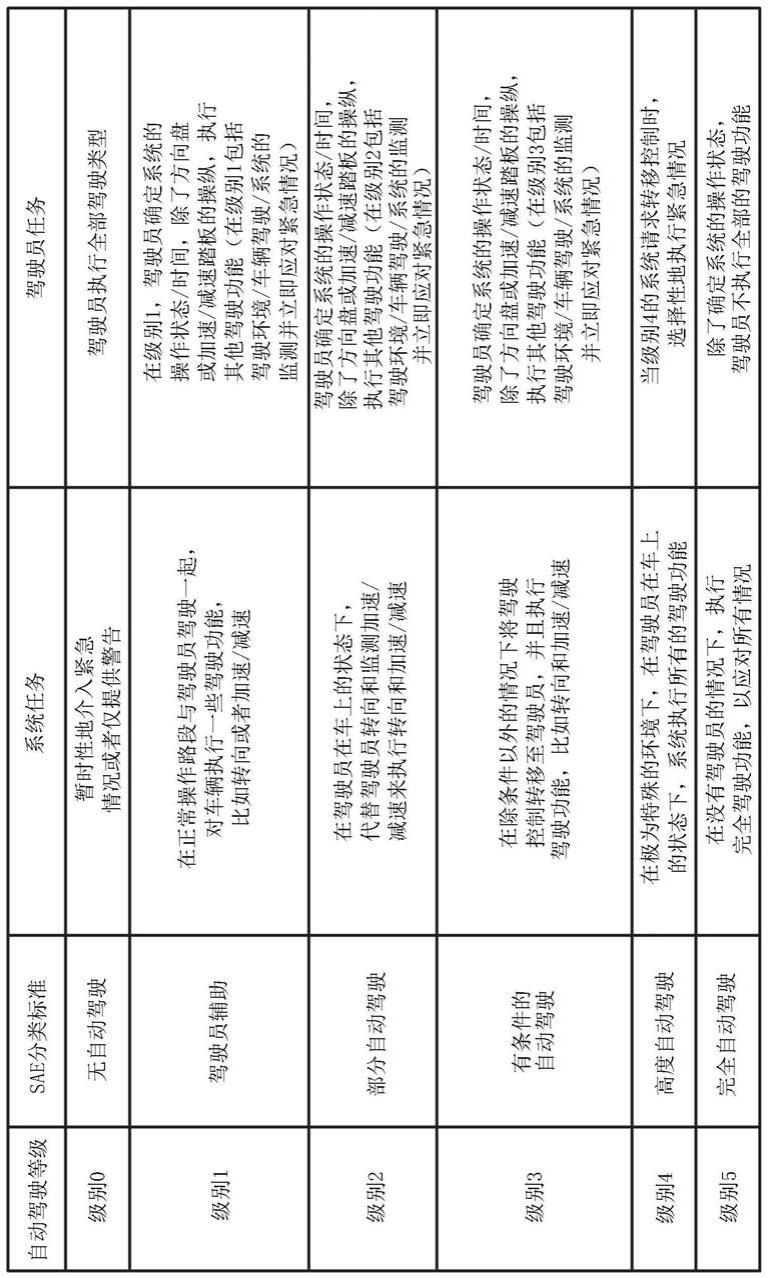
42.图1是根据本发明一种实施方案的具有自动驾驶车辆的定义的自动驾驶级别的图表;
43.图2是示出根据本发明一种实施方案的用于控制自动驾驶的装置的结构框图;
44.图3是示出根据本发明一种实施方案的自动驾驶控制装置的结构框图;
45.图4是示出根据本发明一种实施方案的纵向控制参数应用部的结构框图;
46.图5是示出根据本发明一种实施方案的用于控制自动驾驶的方法的流程图;
47.图6是示出根据本发明一种实施方案的用于控制自动驾驶的方法的框图;
48.图7是示出根据本发明一种实施方案的用于控制自动驾驶的方法的框图。
具体实施方式
49.在下文中,将参考所附附图对本发明的一些实施方案进行详细描述。在将附图标记添加到每个附图的组件中时,应当注意的是,即使当相同或等同组件显示在其他附图中时,也由相同的附图标记表示。此外,在本发明的实施方案的以下描述中,将排除对已知的特征或功能的具体描述,以免不必要地模糊本发明的主旨。
50.在描述根据本发明的实施方案的组件时,可以使用诸如第一、第二、“a”、“b”、(a)、(b)等术语。这些术语仅旨在将一个组件与另一个组件相区分开,并且这些术语并不限制构成组件的本质、顺序或次序。另外,除非另外定义,否则本文使用的所有术语,包括技术或科学术语,具有与本发明所属领域的技术人员通常理解的含义相同的含义。在通常使用的字典中定义的那些术语应被解释为具有与相关领域中的语境含义相等的含义,并且不应被解释为具有理想或过于正式的含义,除非在本发明中明确定义为具有这样的含义。
51.在下文中,将参考图1至图7对本发明的实施方案进行描述。
52.图1是根据本发明实施方案的具有自动驾驶车辆的定义的自动驾驶级别的图表。
53.自动驾驶车辆指的是这样的自驾驶车辆,其识别自身的驾驶环境以确定危险,从而在使驾驶员的驾驶操作最小化的同时控制行驶路线。
54.最后,自动驾驶车辆指的是能够执行驾驶、控制和驻车而无需人为干涉的车辆。自动驾驶车辆专注于具有先进的自动驾驶技术的车辆,自动驾驶技术是自动驾驶车辆的核心,并且表示在没有驾驶员的主动控制或监控的情况下操作车辆的能力。
55.然而,自动驾驶车辆的当前概念可以包括如图1所示的针对全自动驾驶车辆的中间级别中的自动驾驶级别,并且可以对应于用于全自动驾驶车辆的批量生产和商业化的目标导向的概念。
56.根据本发明,用于控制自动驾驶的方法适用于与图1所示的自动驾驶级别中的级别3(有条件的自动驾驶)相对应的自动驾驶车辆,但不限于此。例如,用于控制自动驾驶的方法适用于具有转移控制权限的情况的所有级别的自动驾驶车辆。
57.基于美国汽车工程师协会的自动驾驶车辆的自动驾驶级别被分为级别0到级别5。
58.级别3的自动驾驶允许驾驶期间在人与系统之间的控制转移,这不同于级别4或更高级别的自动驾驶,与全自动驾驶相比,会引起更复杂的问题。
59.级别3的自动驾驶在自动驾驶模式下不需要驾驶员向前看并进行车辆控制,但需要驾驶员必须始终处于能够驾驶的状态,这与系统负责驾驶的全过程的级别4或更高级别不同。
60.另外,级别3的自动驾驶仅在运行设计域(operational design domain,odd)中才有可能,所述运行设计域(odd)指的是在例如天气、道路或通信方面具有特定限制的情况。相应地,在除odd之外的其他情况下,必须执行向手动驾驶模式的切换。换句话说,当车辆在自动驾驶模式下的行驶期间脱离odd状态时,驾驶员必须收回控制权。
61.如果自动驾驶车辆在odd状态下以自动驾驶模式行驶时发生事故(在下文中,称为“自动驾驶事故”),可能会引起与自动驾驶车辆特有的事故责任相关的问题。相应地,需要努力预先避免自动驾驶事故。
62.具体地,在odd状态下需要改进的车辆控制,在所述odd状态下高速公路领航员(highway driving pilot,hdp)是可能的,所述高速公路领航员(hdp)是级别3中被视为“高
速公路自动驾驶”的自动驾驶技术。
63.图2是示出根据本发明实施方案的用于控制自动驾驶的装置(自动驾驶控制装置)的结构框图。
64.参考图2,自动驾驶控制装置200可以主要地包括感测部210、自动驾驶控制器220和下级控制器230。
65.感测部210可以包括gps接收器211、雷达或激光雷达212、外部摄像机213、内部摄像机214、精准地图提供部215和天气传感器216。
66.自动驾驶控制器220可以包括精准定位部221、认知部222、控制器223和存储装置224。
67.下级控制器230可以包括转向控制器231、转向装置232、加速或减速控制器235、加速器236和减速器237。
68.在图2中示出的自动驾驶控制装置200的组件可以不是必要的组件,并且包括更多或更少的组件。
69.gps接收器211可以从定位卫星接收定位信号。在这种情况下,定位信号可以用于生成车辆的地理位置信息。
70.雷达或激光雷达212可以感测车辆的周围物体。
71.雷达或激光雷达212可以用于检测车辆前方、侧面和后方的物体,计算与检测到的物体的距离,确定检测到的物体是静态物体还是动态物体,测量检测到的动态物体的移动速度,确定检测到的动态物体是行人还是车辆,并且通过高分辨率地形扫描识别道路和设施的状况。
72.外部摄像机213可以安装在车辆外部,以拍摄车辆前部、侧部或后部的图像。为此,可以在车辆中设置多个外部摄像机213。由内部摄像机214拍摄的图像可以用于识别车辆的车道线,识别车辆周围的物体,或者实现增强现实,但是不限于此。图像可以用于确定是否安装有拖车。
73.内部摄像机214安装在车内的一侧,以拍摄驾驶员的外貌。
74.由内部摄像机214拍摄的图像可以用于监测驾驶员的注视方向或驾驶员的困倦。
75.精准地图提供部215可以根据自动驾驶控制器220的请求来提供精准地图。
76.天气传感器216可以感测降雨、降雪、雾、温度和湿度。
77.精准定位部221可以通过利用来自gps接收器201的定位信号和从精准地图提供部215获得的精准地图信息来确定车辆的当前位置,并且可以将所确定的车辆的当前位置映射到精准地图上。
78.认知部222可以基于来自雷达或激光雷达212的感测信息和由外部摄像机213拍摄的图像信息来识别车道,并且可以识别在本车周围行驶的车辆,或者本车周围的障碍物或行人。
79.另外,认知部222可以基于来自雷达或激光雷达212的感测信息和由外部摄像机213拍摄的图像信息来确定是否安装有拖车。
80.另外,认知部222可以基于从感测部210收集到的感测信息来确定驾驶环境。
81.例如,驾驶环境可以包括但不限于行驶路线环境、行驶道路环境、天气环境或道路环境。
82.行驶路线环境可以包括但不限于有关直线路线、转弯路线、上坡或下坡的驾驶环境。
83.驾驶环境情况可以包括但不限于稳定环境、延迟环境、拥堵环境。
84.天气环境可以包括但不限于晴天环境、降雨环境、降雪环境或雾环境。
85.道路表面环境可以包括但不限于柏油道路、混凝土道路或未铺设的道路。
86.控制器223可以基于映射到精准地图上的车辆的位置信息以及认知部222的各种认知结果来计算所需命令值,并且将计算出的所需命令值发送给下级控制器230。
87.例如,所需命令值可以包括纵向控制所需值和横向控制所需值。
88.纵向控制所需值和横向控制所需值被发送至加速或减速控制器235以及转向控制器231,以执行纵向方向上的行为控制和横向方向上的行为控制。
89.控制器223可以基于根据认知部222的认知结果的车辆的内部和外部状态来确定是否需要将控制权限从系统转移给驾驶员,以及驾驶员是否按压按钮以解除自动驾驶。
90.当需要将控制权限转移给驾驶员时,控制器223可以执行控制操作以输出用于请求将控制权限转移给驾驶员的特定警告通知。
91.存储装置224可以记录用于自动驾驶控制器220的操作的软件。
92.存储装置224可以保留用于确定纵向控制参数的各种映射表。
93.例如,纵向控制参数可以包括稍后将描述的拖车校正参数p
trail
和周围环境校正参数p
env
。
94.控制器223可以基于由认知部222识别的驾驶环境和拖车的附接状态来生成和校正纵向控制所需值。
95.转向控制器231是负责自动驾驶车辆的横向方向行为的控制器。转向控制器231可以基于从自动驾驶控制器220的控制器223发送的横向控制所需值来控制转向装置232。
96.在这种情况下,转向装置232可以包括用于横向方向行为的致动器。
97.加速或减速控制器235可以根据控制器223的所需命令来控制纵向行为,该纵向行为是自动驾驶车辆的驾驶加速度。
98.加速或减速控制器235可以根据从自动驾驶控制器220的控制器223发送的纵向控制所需值,通过控制加速器236和(或)减速器237来控制自动驾驶车辆的纵向方向行为。作为示例,加速器236包括节气门或加速器,减速器237可以包括制动器,以降低车辆的速度。
99.在这种情况下,节气门可以控制设置在车辆中的发动机和/或电机的运行速度和加速度。
100.图3是示出根据本发明另一个实施方案的自动驾驶控制装置的结构框图。
101.参考图3,自动驾驶控制装置300可以包括:感测部310、纵向控制值生成器320、纵向控制参数应用部330和下级控制器340。
102.感测部310可以包括用于自动驾驶的各种传感器,并且可以基于从传感器收集到的感测信息来生成关于自动驾驶的感测信息。
103.关于自动驾驶的感测信息可以包括:定位信息、精准地图信息、摄像机拍摄信息、雷达或激光雷达的感测信息、天气信息、行驶速度信息、关于识别出的驾驶员注视的信息、关于车辆内部故障的感测信息、关于按钮输入以解除自动驾驶的信息、关于方向盘的操作的感测信息或者关于加速或减速踏板的操作的感测信息,但不限于此。
104.纵向控制值生成器320可以基于关于自动驾驶的感测信息来生成初始纵向控制值“a_raw”。
105.纵向控制参数应用部330可以在接收到从纵向控制值生成器320生成的初始纵向控制值时,基于关于自动驾驶的感测信息来确定校正参数,并且可以通过将所确定的校正参数应用于初始纵向控制值来生成校正后的纵向控制值。
106.下级控制器340可以通过从纵向控制参数应用部330接收校正后的纵向控制值来生成目标输出值。换句话说,下级控制器340可以基于校正后的纵向控制值,通过控制加速器和(或)减速器来控制车辆的纵向驾驶。
107.通过参考图4至图7进行的描述,将更为清楚的理解纵向控制参数应用部330的具体结构和操作。
108.图4是示出根据本发明实施方案的纵向控制参数应用部的结构框图。
109.参考图4,纵向控制参数应用部330可以包括:输入或输出误差校正部331、第一参数校正部332、第二参数校正部333、拖车映射表334和驾驶环境映射表335。
110.输入或输出误差校正部331可以监测下级控制器340的输入或输出误差。当输入或输出误差超过参考值时,输入或输出误差校正部331可以激活控制器校正参数p
hw
,使得输入或输出误差落在特定的允许范围内。
111.第一参数校正部332可以基于关于自动驾驶的感测信息来确定车辆是否安装有拖车。
112.另外,当识别出拖车的安装时,第一参数校正部332可以确定拖车的规格。
113.第一参数校正部332可以通过参考存储在内部存储器(未示出)中的拖车映射表334来确定与所确定的拖车的规格相对应的拖车校正参数p
trail
。
114.第二参数校正部333可以基于关于自动驾驶的感测信息来确定车辆的驾驶环境。
115.第二参数校正部333可以确定所确定的驾驶环境是否是需要应用纵向控制参数的环境。
116.当需要应用纵向控制参数时,第二参数校正部333可以基于车辆的特性(该车辆的特性例如是打滑和行为极限)以及与所确定的驾驶环境相对应的驾驶环境校正参数p
env
,从驾驶环境映射表335中提取针对每个车辆速度的加速度追踪性能。
117.图5是示出根据本发明实施方案的用于控制自动驾驶的方法的流程图。
118.具体地,图5是示出用于通过纵向控制参数应用部330的输入或输出误差校正部331来控制自动驾驶的方法的流程图。
119.参考图5,输入或输出误差校正部331可以测量下级控制器的所需加速度(输入)和输出加速度(输出)之间的输入或输出误差err
hw
(步骤s510)。
120.输入或输出误差校正部331可以确定所测量的输入或输出误差err
hw
是否超过特定的临界误差err
crit
(步骤s520)。
121.当输入或输出误差超过临界误差作为确定结果时,输入或输出误差校正部331可以激活控制器校正参数p
hw
,以将追踪性能保持在临界误差范围内(步骤s530)。
122.当车辆的下级控制器340的所需加速度(输入)与加速度(输出)之间的误差感测为大于参考值时,输入或输出误差校正部331可以激活控制器校正参数p
hw
,使得下级控制器340的输出加速度追踪所需的加速度。
123.例如,当驾驶员施加制动输入时,并且当下级控制器340输出低于所需减速力的减速力时,输入或输出误差校正部331可以激活控制器校正参数p
hw
,使得减速度输入值增加至特定水平。
124.图6是示出根据本发明另一个实施方案的用于控制自动驾驶的方法的框图。
125.具体地,图6是示出通过纵向控制参数应用部330的输入或输出误差校正部332来控制自动驾驶的方法的流程图。
126.参考图6,第一参数校正部332可以从感测部310接收并分析自动驾驶感测信息(步骤s610)。
127.第一参数校正部332可以基于自动驾驶感测信息的分析结果来确定拖车是否被附接至车辆(步骤s620)。
128.当附接有拖车作为确定结果时,第一参数校正部332可以基于关于自动驾驶的感测信息来计算拖车的规格(步骤s630)。在这种情况下,拖车的规格可以包括关于拖车的长度、体积和重量的信息,但不限于此。例如,拖车的规格可以包括拖车的形状和类型。
129.第一参数校正部332可以确定拖车校正参数p
trail
,该拖车校正参数p
trail
是通过参考拖车的预设映射表而计算出的并与拖车的规格相对应(步骤s640)。
130.拖车映射表可以具有与拖车的规格相对应并预先定义的拖车校正参数p
trail
。
131.当拖车附接至车辆时,车辆规格发生变化,并且由于车辆规格的变化,可能会发生加速度控制误差。
132.本发明可以基于拖车校正参数“p
trail”,通过校正由于拖车的附接而导致的加速度控制误差来更精确地执行纵向控制。
133.图7是示出根据本发明另一个实施方案的用于控制自动驾驶的方法的框图。
134.具体地,图7是示出用于通过纵向控制参数应用部330的第二参数校正部333来控制自动驾驶的方法的流程图。
135.参考图7,第二参数校正部333可以从感测部310接收自动驾驶的感测信息,以确定驾驶环境(步骤s710)。
136.第二参数校正部333可以确定是否需要将纵向控制参数应用于所确定的驾驶环境(步骤s720)。
137.当需要应用纵向控制参数作为确定结果时,第二参数校正部333可以通过参考预设的驾驶环境映射表来确定与车辆特性和所确定的驾驶环境相对应的驾驶环境校正参数p
env
(步骤s730)。
138.例如,驾驶环境可以包括但不限于行驶路线环境、行驶道路环境、天气环境或道路表面环境。
139.行驶路线环境可以包括但不限于有关直线路线、转弯路线或上坡的驾驶环境。
140.行驶道路环境可以包括但不限于平稳环境、延迟环境、拥堵环境。
141.天气环境可以包括晴天环境、降雨环境、降雪环境、雾环境或强风环境,但不限于此。
142.道路表面环境可以包括但不限于柏油道路、混凝土道路或未铺设的道路。
143.根据实施方案,第二参数校正部333可以基于针对每个车辆速度的加速度追踪性能以及通过考虑商用车辆的特性(该商用车辆的特性例如是打滑和行为极限)的确定的驾
驶环境,从预设的驾驶环境映射表中提取驾驶环境校正参数p
env
。
144.根据本发明,自动驾驶控制装置300可以通过将由控制参数应用部330计算的三个参数(该三个参数是控制器校正参数p
hw
、拖车校正参数p
trail
和驾驶环境校正参数p
env
)应用于初始输入值“a_raw”并如以下等式1所示校正初始输入值“a_raw”来执行控制操作,以追踪与真实车辆所需的所需输入值“a_req”相对应的行为。
145.等式1:
146.a_req=a_raw(p
hw
+p
trail
+p
env
)
147.另外,根据本发明,可以通过优化纵向控制追踪性能的策略来预先防止自动驾驶事故。
148.另外,本发明可以提供一种用于控制自动驾驶的方法和装置,其能够改善级别3的自动驾驶性能。
149.另外,根据本发明,基于各种车辆规格和各种驾驶环境通过参数映射表来适应地应用纵向控制校正参数,从而改善纵向控制追踪性能并使维护成本最小化。
150.结合本发明中公开的处理器实施方案所描述的方法或算法的操作可以直接利用由处理器运行的硬件模块、软件模块或者硬件模块和软件模块二者的结合来实施。软件模块可以保留在存储介质(即,存储器和/或存储装置)上,比如ram、闪存、rom、可擦除可编程rom(eprom)、电eprom(eeprom)、寄存器、硬盘、可移动硬盘或者光盘
‑
rom(cd
‑
rom)。
151.示例性存储介质可以联接至处理器。处理器可以从存储介质读取信息并且将信息写入存储介质中。或者,存储介质可以与处理器集成。处理器与存储介质可以保留在专用集成电路(asic)中。asic可以位于用户终端中。或者,处理器和存储介质可以作为用户终端的独立组件保留。
152.在上文中,尽管已经参考示例性实施方案和附图对本发明进行了描述,但本发明不限于此,而是可以在不脱离所附权利要求所要求的本发明的精神和范围的情况下,由本发明所属领域技术人员进行各种修改和改变。
153.因此,提供本发明的示例性实施方案是为了解释本发明的精神和范围,而不是限制本发明的精神和范围,因此本发明的精神和范围不受这些实施方案的限制。本发明的范围应当基于所附权利要求进行解释,并且与权利要求等同的范围内的所有技术思想应该包括在本发明的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1