一种电动车启动控制方法与流程
1.本发明涉及电动车启动控制技术领域,更具体地讲,涉及一种电动车顺利平滑启动的方法。
背景技术:
2.随着交通行业的发展,人们出行有了多种选择,电动车不仅方便快捷,在短距离的工作上下班中它起到了很大的作用,对于大部分城市的年轻人来说,它是一个重要交通工具,它比公交、地铁更加灵活,可以载着人们直达目的地。同时,发展电动车不仅对节约能源、保护环境具有十分重要的战略意义,还与亿万百姓的出行问题紧密相联,是关系亿万百姓切身利益的福祉产业,并对拉动内需、促进消费以及推进城镇化建设和新农村建设意义非凡。随着市场需求不断扩大,市场对电动车的骑行感觉和舒适度要求也越来越高,因此控制器需要和电机的匹配度越来越高。由于市面上的电机类型比较多,电机的工艺和绕线方式不同以及霍尔传感器安装角度偏差,如何实现控制器和不同电机的匹配是目前本技术领域的一个难题。
3.本发明根据现有电机启动控制技术的不足,提出一种适用于绝大部分电机平稳顺滑启动的控制方法。
技术实现要素:
4.本发明提供了一种电动车启动控制方法,以解决传统控制方法,不同类型电机不匹配,不同电机参数调试困难等问题。
5.本发明提供了一种电动车启动控制方法,所述电动车驱动系统包括:电源模块、无刷直流电机、控制模块、转把。
6.所述电源模块与所述控制模块相连,用于给所述控制模块提供稳定的直流电压;所述转把与所述控制模块相连,用于提供驱动所述无刷直流电机的运行信号;所述控制模块与所述无刷直流电机相连,用于驱动和控制所述无刷直流电机运行。
7.可选地,所述电源模块为48v直流稳压电源。
8.可选地,所述转把通过转把信号线,电源线以及地线与所述控制器相连,实现所述转把的控制信号传给所述控制模块进行处理。
9.可选地,所述控制模块三相线和霍尔信号线与所述无刷直流电机三相线和霍尔信号线相连,控制和驱动无刷直流电机运行。
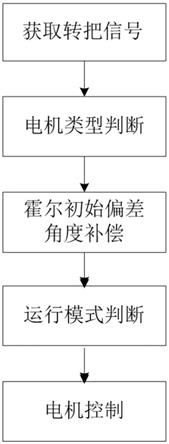
10.本发明提供了一种电动车启动控制方法,具体步骤如下:
11.步骤1:获取转把信号。转把转动发出电机启动信号。
12.步骤2:正反码实现电机类型判断。利用电机在特定激励下的离散性特征,通过给电机一个高脉冲,由于不同电机电感量不同,产生的电流大小不同来识别不同电机参数,判断出所连电机类型,实现单控制器多种电机的匹配。
13.步骤3:通过角度积分处理实现霍尔初始偏差角度补偿。由于霍尔安装、磁钢ns极
不一致以及霍尔器件本身的影响,使得霍尔扇区为非标准扇区,因此需要通过霍尔自学习实现霍尔初始角度偏差的补偿。通过预设扇区计算确定初始运行角速度ω0,再通过单扇区计算确定运行的角速度ω1,进而通过角度积分处理确定角度变化量,实现霍尔初始角度偏差补偿。
14.可选地,角度变化量可由以下公式得到:
[0015][0016]
其中,δω(t)为角速度变化量,δθ(t)为角度变化量,n
p
为电机极对数。
[0017]
步骤4:运行模式判断。为保证电机顺滑启动,采用软启动的方式,即采用一个斜坡函数,通过给定斜坡函数斜率,缓慢增大给定的pwm周期,实现转速按照给定斜率缓慢增加,提高骑行舒适感。
[0018]
步骤5:电机控制。通过控制器的io口给驱动模块中mos管发送导通信号,且发送高电平脉冲的时间为其给定加速度缓慢增大的 pwm周期。随着三相线中电流大小的不同,使得io口发送给驱动模块中mos管的导通信号脉宽不同,实现电流的稳定释放,实现电机的平滑启动。
[0019]
本发明至少包括以下有益效果:
[0020]
1、本发明通过正反码识别电机参数,解决单控制器匹配多种电机的问题。
[0021]
2、本发明通过霍尔自学习实现霍尔初始角度补偿,解决霍尔扇区非标准扇区的问题,实现电机顺滑启动。
[0022]
3、本发明通过斜坡函数实现软启动,方法科学、容易实现,且增加骑行体验舒适感。
附图说明
[0023]
通过参考附图会更加清楚的理解本发明的特征和优点,附图是示意性的而不应理解为对本发明进行任何限制,在附图中:
[0024]
图1为本发明实施例中电动车启动系统装置图;
[0025]
图2为本发明实施例中电动车启动控制流程图;
[0026]
图3为本发明实施例中。
具体实施方式
[0027]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0028]
如图1所示,本发明提供了一种电动车启动系统,包括:电源模块、无刷直流电机、控制模块、转把;
[0029]
其中,所述电源模块为48v直流稳压电源;
[0030]
其中,所述转把通过转把信号线,电源线以及地线与所述控制器相连,实现所述转把的控制信号传给所述控制模块进行处理;
[0031]
其中,所述控制模块三相线和霍尔信号线与所述无刷直流电机三相线和霍尔信号线相连,控制和驱动无刷直流电机运行。其中,转把用于给控制模块提供转把信号,提供无刷直流电机的启动信号;
[0032]
如图2所示,本发明提供了一种电动车启动控制方法,具体步骤如下:
[0033]
步骤s1:通过正反码实现电机类型判断。利用电机在特定激励下的离散性特征,通过给电机一个高脉冲,由于不同电机电感量不同,产生的电流大小不同来识别不同电机参数,判断出所连电机类型,实现单控制器多种电机的匹配;
[0034]
步骤s2:通过角度积分处理实现霍尔初始偏差角度补偿。由于霍尔安装、磁钢ns极不一致以及霍尔器件本身的影响,使得霍尔扇区为非标准扇区,因此需要通过霍尔自学习实现霍尔初始角度偏差的补偿。通过预设扇区计算确定初始运行角速度ω0,再通过单扇区计算确定运行的角速度ω1,进而通过角度积分处理确定角度变化量,实现霍尔初始角度偏差补偿。
[0035]
可选地,角度变化量可由以下公式得到:
[0036][0037]
其中,δω(t)为角速度变化量,δθ(t)为角度变化量,n
p
为电机极对数。
[0038]
步骤s3:运行模式判断。为保证电机顺滑启动,采用软启动的方式,即采用一个斜坡函数,通过给定斜坡函数斜率,缓慢增大给定的pwm周期,实现转速按照给定斜率缓慢增加,提高骑行舒适感;
[0039]
步骤s4:通过控制器的io口给驱动模块中mos管发送导通信号,且发送高电平脉冲的时间为其给定加速度缓慢增大的pwm周期。随着三相线中电流大小的不同,使得io口发送给驱动模块中mos管的导通信号脉宽不同,实现电流的稳定释放,实现电机的平滑启动。
[0040]
其中,所述步骤s1中正反码识别电机类型,需要输入同步电角度数据,这个数据需要根据当前使用电机的特性进行输入,每次霍尔信号变化时同步电角度,如果角度较大,会影响控制效果,从而影响电机运行效率,或者使电机震荡,因此对电机进行初始测试,确定程序电机库中电角度的约定。1.默认电机a相反电势最高点作为电角度的0度;2.电机霍尔a的上升沿到电机a相反电动势最高点的延迟角度为同步电角度;3.如果电机没有虚拟中点接出,需要连接三个相同阻值电阻到电机三相接线上,电阻另外一端连接到一起作为虚拟中点; 4.将霍尔信号接入5v电,并且在a相上桥臂接入上拉电阻;5.接入示波器,转动电机,测试反向电动势信号及霍尔信号。并将测得的反电动势信号及霍尔信号添加到程序中。当转把输出启动信号,通过给电机一个周期为0.06ms的pwm脉冲,高电平为0.03ms,低电平为 0.03ms,通过检测a相线上的反电动势大小以及检测到的霍尔安装初始角度值,对电机参数进行识别,确定对应的电机参数,执行相应的程序。
[0041]
如图3所示,是本实施例中步骤s2霍尔初始角度补偿,以南普电机为例,通过步骤s1检测到的霍尔扇区初始值为第一扇区为 59.743
°
,第二扇区为66.071
°
,第三扇区为56.93
°
,第四扇区为 56.46
°
,第五扇区为67.456
°
,第六扇区为53.283
°
,由此确定该电机霍尔扇区为非标准60
°
扇区角度,进而通过角度积分公式处理,使角度偏差拟合到标准扇区,实现霍尔初始角度偏差的补偿。
[0042]
其中,所述步骤s3中斜坡函数,通过给定目标速度为2300r/min, 以及给定斜率1/
6000,通过斜坡函数,实现缓慢增大给定的pwm周期,进而实现转速按照给定加速度缓慢增加,提高骑行舒适感。
[0043]
显而易见的是,本领域的技术人员可以从根据本发明的实施方式的各种结构中获得根据不麻烦的各个实施方式尚未直接提到的各种效果。尽管本发明/发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用。它完全可以被适用于各种适合本发明的领域。对于熟悉本领域的人员而言,可容易地实现另外的修改。因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1