一种无轨胶轮车辅助驾驶系统及控制方法与流程
[0001]
本发明属于煤矿辅助运输设备领域,具体涉及一种无轨胶轮车辅助驾驶系统及控制方法。
背景技术:
[0002]
近年来,在我国煤矿井下辅助运输中,无轨胶轮车应用越来越多。这种车由于无轨道限制,具有机动灵活、适应性强、安全高效、应用范围广等特点,越来越受到重视,是运送材料、设备、人员的一种较先进的辅助运输车辆。胶轮车在井下得到越来越广泛的应用和推广,是煤矿辅助运输的主要发展方向。
[0003]
但对于我国大多数煤矿井下环境照度低,能见度差,巷道场景单一,车辆在运输过程中驾驶员容易产生视觉疲劳,进而反应变慢,在转弯和上下坡的工况下作业时,易导致追尾碰撞等安全事故。在煤矿安全规程中对各类运输设备都有限速规定,但在实际运输中往往会超速行驶,紧急情况制动时会导致制动距离变长,增加了事故发生率。井下分支巷道多,且参与生产的作业人员也较多,经常会有人员从分支巷道步行走出的情况出现,此时驾驶员若反应不及时且车速过快的情况下容易发生碰撞导致施工人员致残或致死。
技术实现要素:
[0004]
为了解决上述的技术问题,本发明提供了一种无轨胶轮车辅助驾驶系统及控制方法,为驾驶员提供安全预防性驾驶辅助,最大限度地减少安全事故的发生。
[0005]
为实现上述目的,本发明提供的一种无轨胶轮车辅助驾驶系统,包括:
[0006]
信息采集模块,用于探测、感知车辆周围环境及采集无轨胶轮车的运行信息;通讯模块,用于与调度平台进行信息交互;视频模块,用于探测周围环境及监测驾驶员状态;定位模块,用于向调度平台上报无轨胶轮车及其附近人员、车辆的位置信息;显示模块,用于接收、显示报警信息,并进行语音提醒;执行模块,用于接收控制信息,完成响应状态转换;控制模块,实现对所述信息采集模块、所述通讯模块、所述视频模块、所述定位模块、所述显示模块和所述执行模块的控制;
[0007]
所述视频模块包括驾驶员状态监测摄像仪,所述驾驶员状态监测摄像仪集成有红外摄像头和热成像摄像头,用以检测驾驶员的驾驶状态及驾驶行为,当监测到驾驶员有影响行车安全的驾驶行为或驾驶状态时,所述驾驶员状态监测摄像仪发送报警信号至所述控制模块。
[0008]
具体地,所述信息采集模块至少包括激光雷达感知模块、毫米波雷达感知模块、超声波雷达感知模块、车速传感器、倾角传感器和转角传感器,所述激光雷达感知模块安装于车辆的前侧和后侧,毫米波雷达感知模块安装于车辆的前侧和后侧,超声波雷达感知模块安装于车辆的前后左右四个面。
[0009]
具体地,所述信息采集模块还包括无线射频识别器,所述无线射频识别器通过识别无源射频识别卡获得限速信息;所述显示模块包括液晶显示屏和抬头显示系统,所述抬
头显示系统投影警示光条并发出报警提示音。
[0010]
具体地,所述通讯模块为无线通讯模块,包括5g通讯模块、4g通讯模块和wifi通讯模块,所述无线通讯模块通过井下基站与调度平台进行信息交互。
[0011]
具体地,所述视频模块还包括全景摄像仪和红外热像仪,所述全景摄像仪至少有4个,分别安装于车辆前后左右四个面的上部,所述红外热像仪安装于车辆前侧。
[0012]
具体地,所述执行模块包括数字放大器、比例电磁阀、安全带收紧装置、语音报警器,所述数字放大器为比例电磁阀提供电流信号,所述比例电磁阀将所述电流信号转换成力,实现制动压力调节。
[0013]
根据上述无轨胶轮车辅助驾驶系统,本发明还提供了一种无轨胶轮车辅助驾驶系统控制方法,包括以下步骤:
[0014]
(1)所述激光雷达感知模、毫米波雷达感知模块和红外热像仪实时探测无轨胶轮车的前方目标障碍物,获取无轨胶轮车与目标障碍物的相对距离、相对角度及相对速度,并传输给控制模块;
[0015]
(2)控制模块根据相对距离、相对角度及相对速度计算出碰撞时间;
[0016]
(3)当碰撞时间小于碰撞预警时间阀值时,控制模块发送报警信号到显示模块和执行模块,所述抬头显示系统进行报警提示,所述安全带收紧装置产生安全带收紧约束力;
[0017]
(4)当碰撞时间小于碰撞紧急制动时间阀值时,控制模块获取当前车速、车辆俯仰角信息,输出制动压力控制信号至数字放大器,数字放大器根据控制信号为比例电磁阀提供相对应的电流信号,比例电磁阀把电流信号转换成力,实现无轨胶轮车制动压力调节。
[0018]
具体地,所述无轨胶轮车辅助驾驶系统控制方法还包括步骤:
[0019]
(1)在需要限速或事故多发巷道区间段的首尾处分别安装无源射频识别卡a和卡b;
[0020]
(2)当无轨胶轮车行驶接近无源射频识别卡a时,无线射频识别器读取无源射频识别卡a保存的限速信息并发送至控制模块,控制模块通过控制执行模块将车速调整至限速值继续行驶;
[0021]
(3)当无轨胶轮车行驶接近无源射频识别卡b时,无线射频识别器读取无源射频识别卡b保存的解除限速信息并发送至控制模块,控制模块将车速调整至正常行驶速度。
[0022]
具体地,所述无轨胶轮车辅助驾驶系统控制方法还包括步骤:
[0023]
(1)所述红外摄像头对驾驶员头部进行识别、定位检测;
[0024]
(2)所述热成像摄像头根据所述红外摄像头的定位信息对驾驶员头部进行检测;
[0025]
(3)所述热成像摄像头根据驾驶员眼部上下预设区域内检测温度的平均值判断驾驶员是否佩戴安全帽、防尘口罩;
[0026]
(4)所述红外摄像头输出人眼定位区域,获取人眼轮廓及眼球采样点,并根据单位时间内眼球被遮挡比例及时间判断驾驶员是否处于疲劳驾驶状态;
[0027]
(5)所述红外摄像头结合左右转向灯控制信号及方向盘转角信号,根据驾驶员头部偏移方向和眼球指向角判断驾驶员注意力是否集中;
[0028]
(6)当所述红外摄像头或所述热成像摄像头判断驾驶员有未佩戴安全帽或未戴防尘口罩或处于疲劳驾驶状态或注意力不集中的驾驶状态时,所述驾驶员状态监测摄像仪发送报警信号至控制模块;
[0029]
(7)控制模块通过液晶显示屏显示报警信息,并发出报警提示音。
[0030]
具体地,所述无轨胶轮车辅助驾驶系统控制方法还包括步骤:
[0031]
定位模块将无轨胶轮车附近的人员、车辆的位置信息及运动方向发送给调度平台;
[0032]
控制模块通过无线通讯模块与调度平台交互信息,获取无轨胶轮车附近的人员、车辆的位置信息、运动方向;
[0033]
控制模块根据获取的位置信息、运动方向测算无轨胶轮车与附近的人员、车辆是否存在碰撞的可能性;
[0034]
若存在碰撞可能性,控制模块控制无轨胶轮车减速,执行模块中的语音报警器发出报警提示音。
[0035]
本发明提供的一种无轨胶轮车辅助驾驶系统及控制方法,能够监测驾驶员的驾驶行为及状态,主动预警提示驾驶员,实现安全预防性驾驶;在紧急形况下,能够及时采取减速、刹车等安全措施时,自主实现紧急刹车制动,从而减少追尾碰撞等事故,降低人员及财产损失,提高了辅助运输设备的安全性。
附图说明
[0036]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图得其他相关的附图。
[0037]
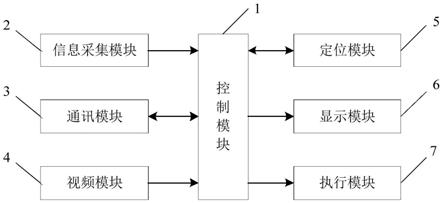
图1为本发明一种无轨胶轮车辅助系统的控制框图;
[0038]
图2为本发明信息采集模块的分解图;
[0039]
图3为本发明视频模块的分解图;
[0040]
图4为本发明执行模块的分解图。
[0041]
图例说明:
[0042]
1为控制模块;2为信息采集模块;3为通讯模块;4为视频模块;5为定位模块;6为显示模块;7为执行模块。
具体实施方式
[0043]
下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0044]
如图1至图4所示,本发明提供了一种无轨胶轮车辅助驾驶系统,该系统包括控制模块1、信息采集模块2、通讯模块3、视频模块4、定位模块5、显示模块6和执行模块7。
[0045]
所述控制模块1实现对所述信息采集模块、所述通讯模块、所述视频模块、所述定位模块、所述显示模块和所述执行模块的控制。
[0046]
所述信息采集模块2用于探测、感知车辆周围环境及采集无轨胶轮车的运行信息,如图2所示,本发明提供的信息采集模块2至少包括激光雷达感知模块、毫米波雷达感知模块、超声波雷达感知模块、车速传感器、倾角传感器和转角传感器。所述激光雷达感知模块和毫米波雷达感知模块安装于车辆的前侧和后侧,可以探测感知车辆前后的障碍物;所述超声波雷达感知模块安装于车辆的前后左右四个面,用于倒车及小角度转弯的盲区探测;
所述车速传感器用于检测获取车辆的车速;所述倾角传感器用于测量车辆的俯仰角度;所述转角传感器用于测量无轨胶轮车方向盘的旋转角度。本发明提供的信息采集模块2不拘泥于上述设计,可以根据实际需求增加感知模块和传感器的数量和各类。
[0047]
具体地,所述信息采集模块2还包括一无线射频rfid(radio frequency identification)识别器,所述rfid识别器通过识别rfid识别卡获得限速信息。
[0048]
所述通讯模块3为无线通讯模块,将5g通讯模块、4g通讯模块和wifi通讯模块集成于无线通讯模块上,通过井下基站与调度平台进行信息交互;所述定位模块5,为调度平台、控制平台提供无轨胶轮车及其附近人员、车辆的位置信息;所述显示模块6包括液晶显示屏和抬头显示系统,所述抬头显示系统投影警示光条并发出报警提示音。所述通讯模块3还包括一车载无线传输终端,受巷道环境的影响,部分巷道无能通讯信号不太好,所述车载无线传输终端可临时用于中继器,增强无线信号传输。
[0049]
图3所示为所述视频模块4的分解图,所述视频模块4包括驾驶员状态监测摄像仪、全景摄像仪和红外热像仪,所述全景摄像仪至少有4个,分别安装于无轨胶轮车车身的前后左右四个面的上部,所述红外热像仪安装于车辆前侧。所述驾驶员状态监测摄像仪集成有红外摄像头和热成像摄像头。所述视频模块通过不同功能的摄像仪进一步对无轨胶轮车周围的环境探测感知作补充,使得无轨胶轮车辅助系统的安生性进一步提高。
[0050]
图4所示为所述执行模块7的分解图,所述执行模块7包括数字放大器、比例电磁阀、安全带收紧装置、语音报警器、防爆电动机和防爆柴油机。所述执行模块7用于接收控制模块1发送的控制信息,完成响应状态转换,如车辆制动、安全带收紧、报警提示等。
[0051]
下面结合图1至图4和实施例来阐述一下本发明提供的无轨胶轮车辅助驾驶系统的控制过程。
[0052]
实施例1:
[0053]
激光雷达感知模块或毫米波雷达感知模块或红外热像仪等感知元件对周围环境、障碍物进行实时检测,当探测到车辆前方有目标障碍物时,获取无轨胶轮车与目标障碍物的相对距离、相对角度及相对速度等数据信息并发送给控制模块1,控制模块1通过其核心平台—嵌入式计算控制平台,计算出碰撞时间。控制模块1将实时计算的碰撞时间与存储在控制模块1中的碰撞预警时间阀值和紧急制动时间阀值相比较。当碰撞时间小于碰撞预警时间阀值时,控制模块1发送控制信号和报警信号至显示模块6和执行模块7,显示模块6中的抬头显示系统将红色警示光条投影到前挡风玻璃上并持续发出报警提示音,执行模块7中的安全带收紧装置根据控制信号产生安全带收紧约束力,加强对乘员的约束力,减小冲击伤害,同时,语音报警器向周围附近人员及车辆发出警报提示音。当碰撞时间小于紧急制动时间阀值时,控制模块1根据车速传感器检测的当前车速及倾角传感器检测的俯仰角等数据,基于车辆运行状态控制策略输出安全制动所需的制动压力控制曲线至数字放大器,数字放大器根据控制模块1提供的控制信号为比例电磁阀提供相对应的电流信号,比例电磁阀把电流信号转换成力,进行制动液压调节,实现无轨胶轮车的制动,保证了无轨胶轮车的行驶安全。
[0054]
实施例2:
[0055]
驾驶员状态监测摄像仪在行车过程中不间断监测记录驾驶员的驾驶状态及驾驶行为,主要包括以下步骤:
[0056]
(1)所述驾驶员状态监测摄像仪中的红外摄像头拍摄驾驶员头部图像,进行识别、定位检测;
[0057]
(2)所述热成像摄像头根据所述红外摄像头的定位信息对驾驶员头部进行图像拍摄、检测,将红外摄像头和热成像摄像头拍摄的图像置于同一个坐标系中;
[0058]
(3)所述热成像摄像头根据驾驶员眼部上下预设区域内检测温度的平均值判断驾驶员是否佩戴安全帽、防尘口罩;
[0059]
(4)所述红外摄像头输出人眼定位区域,获取人眼轮廓及眼球采样点,并根据单位时间内眼球被遮挡比例及时间判断驾驶员是否处于疲劳驾驶状态;
[0060]
(5)所述红外摄像头结合左右转向灯控制信号及方向盘转角信号,根据驾驶员头部偏移方向和眼球指向角判断驾驶员注意力是否集中;
[0061]
(6)当所述红外摄像头或所述热成像摄像头判断驾驶员有未佩戴安全帽或未戴防尘口罩或处于疲劳驾驶状态或注意力不集中的驾驶状态时,所述驾驶员状态监测摄像仪发送报警信号至控制模块1;
[0062]
(7)控制模块1通过显示模块6中的液晶显示屏显示报警信息,并持续发出报警提示音,警示驾驶员注意行车安全。
[0063]
实施例3:
[0064]
在需要限速或事故多发巷道区间段的首尾处分别安装rfid识别卡a和卡b。当无轨胶轮车行驶接近rfid识别卡a时,rfid识别器读取rfid识别卡a保存的限速信息并发送至控制模块1,控制模块1根据限速信息发送控制信号至执行模块7,将车速调整至限速值继续行驶。当无轨胶轮车行驶接近rfid识别卡b时,rfid识别器读取rfid识别卡b保存的解除限速信息并发送至控制模块1,控制模块1发送控制信息给执行模块7,将车速调整到正常行驶速度继续行驶。
[0065]
实施例4:
[0066]
定位模块5将无轨胶轮车附近的人员、车辆的位置信息及运动方向等信息发送给调度平台,控制模块1通过无线通讯模块与调度平台交互信息,获取无轨胶轮车附近的人员、车辆的位置信息、运动方向等信息,控制模块1根据获取的信息测算出附近的人员、车辆是否会从分支巷道内进入无轨胶轮车行驶的路径中;若存在碰撞可能性,控制模块1控制无轨胶轮车适当减速,同时发送报警指令至执行模块7中的语音报警器,语音报警器发出报警提示音,警示分支巷道内的人员及车辆注意避让。
[0067]
实施例5:
[0068]
控制模块1通过激光雷达感知模块、毫米波雷达感知模块实时探测后方的人员、车辆距离无轨胶轮车的相对距离、相对角度以及相对速度,当后方车辆、人员距离无轨胶轮车的距离小于安全跟车距离时,控制模块1发出报警信号至执行模块7中的语音报警器,语音报警器对后方车辆及人员发出报警提示音,警示后方车辆注意保持安全车间距。
[0069]
实施例6:
[0070]
视频模块4中的全景摄像仪分别安装于无轨胶轮车的前后左右四个面,全景摄像仪拍摄视频画面并将视频画面传输至控制模块1,由控制模块1控制合成为360度全景影像。
[0071]
信息采集模块2中的超声波雷达感知分别安装于车辆前后左右四个面,用于对近距离障碍物进行探测,超声波雷达感知模块将获取的信息转换成数字信号传输至控制模块
1,由控制模块1计算无轨胶轮车与目标障碍物的距离。
[0072]
控制模块1将360度全景影像信息及与无轨胶轮车与目标障碍物的距离信号发送至显示模块6中的液晶显示屏。这样,驾驶员在巷道内小角度转弯和倒车时,可通过观察液晶显示屏中显示的无轨胶轮车周围的全景影像画面及与障碍物的距离指示来操作车辆转弯和倒车。
[0073]
本发明提供的一种无轨胶轮车辅助驾驶系统及控制方法,能够监测驾驶员的驾驶行为及状态,主动预警提示驾驶员,实现安全预防性驾驶;在紧急形况下,能够及时采取减速、刹车等安全措施时,自主实现紧急刹车制动,从而减少追尾碰撞等事故,降低人员及财产损失。
[0074]
应当理解,以上所描述的具体实施例仅用于解释本发明,并不用于限定本发明。由本发明的精神所引伸出的显而易见的变化或变动仍处于本发明的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1