驾驶意识推定装置的制作方法
1.本公开涉及驾驶意识推定装置。
背景技术:
2.作为与驾驶意识推定装置相关的技术,已知日本专利特开2017
‑
199279号公报记载的装置。在日本专利特开2017
‑
199279号公报记载的驾驶意识推定装置中,基于车辆的驾驶者(驾驶员)的图像,计算与驾驶者的驾驶意识相关的驾驶准备度。
3.然而,关于驾驶准备度,例如存在驾驶员的手动驾驶能力带来的个体差异。除此之外,关于驾驶准备度,即使是同一驾驶员,也会因为例如手动驾驶能力所涉及的状态(头脑的清晰、手的疲劳等)的好坏而存在当日内变动。但是,在上述驾驶意识推定装置中,未充分考虑这样的驾驶准备度的特征,存在难以精度良好地计算驾驶准备度的情况。
技术实现要素:
4.本公开的一个方式以提供能够精度良好地计算驾驶准备度的驾驶意识推定装置为课题。
5.本公开的一个方式所涉及的驾驶意识推定装置具备:驾驶员状态推定部,推定本车辆的驾驶员的状态;手动驾驶能力推定部,基于本车辆的行驶状态、本车辆的周围的行驶环境及驾驶员的反应之中的至少任意一种,推定驾驶员的手动驾驶能力;以及驾驶准备度计算部,基于驾驶员的状态及驾驶员的手动驾驶能力,计算与驾驶员的驾驶意识相关的驾驶准备度。
6.在该驾驶意识推定装置中,基于驾驶员的手动驾驶能力来计算驾驶准备度,因此与以往相比,能够考虑例如上述驾驶员的个体差异及当日内变动来计算驾驶准备度。由此,能够精度良好地计算驾驶准备度。
7.在一个实施方式中,手动驾驶能力推定部也可以基于在车道变更时或进入汇流点时的驾驶员的侧方视觉辨识时间,推定手动驾驶能力。在该情况下,能够尤其基于驾驶员的手动驾驶能力之中的空间认知能力,计算驾驶准备度。
8.在一个实施方式中,也可以在本车辆的周围的预定范围内不存在其他车辆的情况下,手动驾驶能力推定部推定手动驾驶能力。由此,能够防止由于其他车辆的存在所引起的侧方视觉辨识时间延长,而错误地推定手动驾驶能力。
9.在一个实施方式中,手动驾驶能力推定部也可以基于尾随行驶时与前方车辆的车间距离及驾驶员的视线转移时间,推定手动驾驶能力。在该情况下,能够尤其基于驾驶员的手动驾驶能力之中的空间注意能力,计算驾驶准备度。
10.在一个实施方式中,手动驾驶能力推定部也可以基于进入弯道时的驾驶员的视线的位置,推定手动驾驶能力。在该情况下,能够尤其基于驾驶员的手动驾驶能力之中的行动计划能力,计算驾驶准备度。
11.在一个实施方式中,手动驾驶能力推定部也可以基于经过障碍物的侧方时的本车
memory)、ram(random access memory)等的电子控制单元。在ecu 10中,例如将rom存储的程序加载到ram,由cpu执行加载到ram的程序,从而实现各种功能。ecu 10也可以由多个电子控制单元构成。
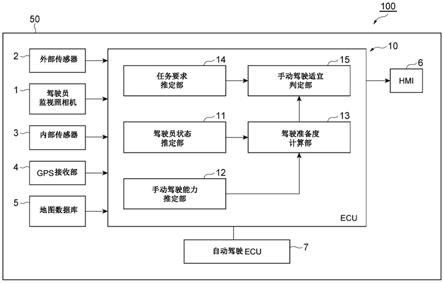
31.ecu 10与驾驶员监视照相机1、外部传感器2、内部传感器3、gps(global positioning system)接收部4、地图数据库5、hmi 6连接。ecu10与自动驾驶ecu 7连接。
32.驾驶员监视照相机1设置在汽车等本车辆50的转向柱的盖上,并位于本车辆50的驾驶员(以下也简称为“驾驶员”)的正面的位置,拍摄驾驶员的头部。也可以设置多个驾驶员监视照相机1,从而从多个方向拍摄驾驶员。驾驶员监视照相机1将拍摄有驾驶员的驾驶员图像发送到ecu 10。
33.外部传感器2是检测本车辆50的周边环境的检测设备。外部传感器2包括照相机及雷达传感器。照相机例如设置在本车辆50的前挡风玻璃的内侧,拍摄本车辆50的前方。照相机也可以设置在本车辆50的背面及侧面。照相机将本车辆50的周围的拍摄信息发送至ecu 10。照相机可以是单眼照相机,也可以是立体照相机。立体照相机具有以再现双眼视差的方式配置的2个拍摄部。
34.雷达传感器是利用电波(例如毫米波)或光来检测本车辆50的周边的障碍物的检测设备。雷达传感器包括例如毫米波雷达或激光雷达(lidar:light detection and ranging)。雷达传感器将电波或光发送至本车辆50的周边,并接收障碍物反射的电波或光来检测障碍物。雷达传感器将检测出的障碍物信息发送至ecu 10。
35.内部传感器3是检测本车辆50的行驶状态的检测设备。内部传感器3包括车速传感器、加速度传感器及偏航角速度传感器。车速传感器是检测本车辆50的速度的检测器。作为车速传感器,例如针对本车辆50的车轮或与车轮一体旋转的驱动轴等而设置,使用了检测车轮的旋转速度的轮速传感器。车速传感器将检测出的车速信息(轮速信息)发送至ecu 10。
36.加速度传感器是检测本车辆50的加速度的检测器。加速度传感器例如包括检测本车辆50的前后方向的加速度的前后加速度传感器和检测本车辆50的横向加速度的横向加速度传感器。加速度传感器例如将本车辆50的加速度信息发送至ecu 10。偏航角速度传感器是检测本车辆50的重心绕铅垂轴的偏航角速度(旋转角速度)的检测器。作为偏航角速度传感器,例如可以使用陀螺仪传感器。偏航角速度传感器将检测出的本车辆50的偏航角速度信息发送至ecu 10。
37.gps接收部4通过从3个以上的gps卫星接收信号,来测定本车辆50的位置(例如本车辆50的纬度及经度)。gps接收部4将测定出的本车辆50的位置信息发送至ecu 10。另外,驾驶意识推定装置100也可以通过使用了外部传感器2的检测结果和地图信息的slam(simultaneous localization and mapping)技术来获取本车辆50的位置信息。
38.地图数据库5是存储地图信息的数据库。地图数据库5形成在例如搭载于本车辆50的hdd(hard disk drive)内。地图信息包括道路的位置信息、道路形状的信息(例如弯道、直线部的类别、弯道的曲率等)、道路的宽度信息、道路的高度信息、交叉口、汇流点及路口的位置信息及建筑物的位置信息等。地图信息也可以包括与信息牌、标识等道路上的设置物相关的位置信息。另外,地图数据库5也可以存储于能够与本车辆通信的管理中心等设施的计算机。
39.hmi 6是用于在驾驶意识推定装置100与驾驶员之间进行信息的输入输出的接口。hmi 6例如具备本车辆50的显示部(显示器)及扬声器。hmi 6根据来自ecu 10的控制信号,进行显示器的图像输出及来自扬声器的声音输出。hmi 6也可以具备hud(head up display)。
40.自动驾驶ecu 7搭载于本车辆50,是用于执行本车辆50的自动驾驶的电子控制单元。自动驾驶是指驾驶员不进行驾驶操作而自动地使本车辆50行驶的车辆控制。自动驾驶ecu 7基于gps接收部4的本车辆50的位置信息、地图数据库5的地图信息、后述的本车辆50的行驶环境及行驶状态,生成沿预先设定的目的路线的行驶计划。此处的目的路线由导航系统设定。自动驾驶ecu 7按照行驶计划执行自动驾驶。自动驾驶ecu 7向本车辆50的致动器(引擎致动器、转向致动器、刹车致动器等)发送控制信号来执行自动驾驶。自动驾驶ecu 7通过周知的手法生成行驶计划,并执行自动驾驶。自动驾驶ecu 7也可以进行尾随在前车辆的行驶控制,以使得针对在前车辆进行尾随行驶的方式使本车辆50自动驾驶。
41.自动驾驶ecu 7在自动驾驶时(自动驾驶的执行期间),在进行了例如超控操作的情况下,解除自动驾驶的执行并转变为手动驾驶(即,将本车辆50的驾驶从自动驾驶切换为手动驾驶)。超控操作是指用于将本车辆50的驾驶从自动驾驶转变为手动驾驶的、由驾驶员进行的介入操作。自动驾驶ecu 7将对本车辆50的致动器的控制指令值慢慢减少到零,来转变为手动驾驶。另外,手动驾驶还包括执行支持驾驶员的驾驶的周知的驾驶支持控制的情况。
42.接下来,对ecu 10的功能性构成进行说明。
43.ecu 10包括驾驶员状态推定部11、手动驾驶能力推定部12、驾驶准备度计算部13、任务要求推定部14及手动驾驶适宜判定部15。另外,针对ecu 10的一部分功能,也可以采用在能够与本车辆50通信的管理中心等设施的计算机和/或自动驾驶ecu 7中执行的方式。ecu 10也可以与自动驾驶ecu 7一体。
44.驾驶员状态推定部11推定本车辆50的驾驶员的状态。在本车辆50的自动驾驶时,驾驶员状态推定部11推定驾驶员的状态。驾驶员状态推定部11推定驾驶员的反应时间(反应延迟),作为驾驶员的状态。反应时间包括周边视觉反应时间及车辆行为反应时间。驾驶员状态推定部11将从驾驶员能看到视觉辨识对象的定时到驾驶员对视觉辨识对象进行视觉辨识的反应时间识别为周边视觉反应时间。驾驶员状态推定部11将从驾驶员能看到视觉辨识对象的定时到驾驶员对视觉辨识对象执行车辆行为的反应时间识别为车辆行为反应时间。对反应时间的识别手法并无特别限定,可以采用周知的各种手法。
45.能够从本车辆50的周围的行驶环境识别视觉辨识对象。基于例如外部传感器2的检测结果、gps接收部4的位置信息、地图数据库5的地图信息及与自动驾驶ecu 7的自动驾驶相关的信息之中的至少任意信息来识别本车辆50的周围的行驶环境。能够通过周知的各种手法识别本车辆50的周围的行驶环境。行驶环境包括本车辆50的周围的障碍物的状况及道路状况。本车辆50的周围的障碍物的状况包括障碍物相对于本车辆50的位置、障碍物相对于本车辆50的相对速度、障碍物相对于本车辆50的移动方向等。障碍物除了包括护栏、道路上的设置物、建筑物等固定障碍物之外,还包括行人、自行车、其他车辆等移动障碍物。道路状况包括本车辆50的前方的道路形状(弯道、交叉口、汇流区间等)。视觉辨识对象包括障碍物及道路形状之中的至少任意一种。能够从驾驶员监视照相机1获取的驾驶员图像(以下
简称为“驾驶员图像”)检测驾驶员的视线。能够通过周知的手法根据驾驶员图像检测驾驶员的眼球及眼球的运动来检测驾驶员的视线。能够根据行驶期间的本车辆50的行驶状态检测车辆行为。基于例如内部传感器3的检测结果识别行驶期间的本车辆50的行驶状态。行驶状态包括本车辆50的车速、本车辆50的加速度、本车辆50的偏航角速度。
46.驾驶员状态推定部11推定作为驾驶员的视线转移持续的时间的视线转移时间,作为驾驶员的状态。驾驶员状态推定部11基于例如驾驶员图像,识别视线转移时间。对视线转移时间的识别手法并无特别限定,可以采用周知的各种手法。
47.驾驶员状态推定部11推定驾驶员的清醒度,作为驾驶员的状态。驾驶员状态推定部11基于例如驾驶员图像,根据驾驶员每分钟的闭眼率、眼睛的睁眼的状况、眨眼的频率或眼球运动等,识别驾驶员的清醒度。驾驶员状态推定部11也可以基于例如本车辆50的行驶状态,识别驾驶员的清醒度。清醒度是指表示驾驶员不处于由于睡眠不足等而意识模糊的状态而是处于清醒的状态的程度。对清醒度的识别手法并无特别限定,可以采用周知的各种手法。清醒度可以是内包有驾驶员对方向盘的抓握压力、对扶手的按压力、心率、肌电的信息及脑电图之中任意一种的指标。可以使用各种公知传感器来获取对方向盘的抓握压力、对扶手的按压力、心率、肌电的信息及脑电图。
48.驾驶员状态推定部11推定的驾驶员的状态例如能够按从好的状态到坏的状态的顺序分为“高”、“中”、“低”3个级别。作为一个例子,驾驶员状态推定部11可以如以下那样将驾驶员的状态分为3个级别。
49.驾驶员状态推定部11将识别的反应时间按从好的状态到坏的状态的顺序分为“高”、“中”、“低”3个级别。具体而言,在反应时间为第1反应时间阈值以下的情况下,将反应时间设为“高”,在反应时间为比第1反应时间阈值大的第2反应时间阈值以上的情况下,将反应时间设为“低”,在除此之外的情况下,将反应时间设为“中”。驾驶员状态推定部11将识别的视线转移时间例如按从好的状态到坏的状态的顺序分为“高”、“中”、“低”3个级别。具体而言,在视线转移时间为第1视线转移时间阈值以下的情况下,将视线转移时间设为“高”,在视线转移时间为比第1视线转移时间阈值大的第2视线转移时间阈值以上的情况下,将视线转移时间设为“低”,在除此之外的情况下,将视线转移时间设为“中”。驾驶员状态推定部11将识别的清醒度例如按从好的状态到坏的状态的顺序,分为“高”、“中”、“低”3个级别。具体而言,在清醒度为第1清醒度阈值以下的情况下,将清醒度设为“低”,在清醒度为比第1清醒度阈值大的第2清醒度阈值以上的情况下,将清醒度设为“高”,在除此之外的情况下,将清醒度设为“中”。并且,驾驶员状态推定部11将反应时间、视线转移时间及清醒度的各状态的级别之中的最坏的级别或最好的级别设为驾驶员的状态。或者,驾驶员状态推定部11将反应时间、视线转移时间及清醒度的各状态的级别之中存在的最多的级别设为驾驶员的状态。对驾驶员的状态的表现方法并无特别限定,可以为数值,也可以分为多个级别。
50.另外,作为驾驶员的状态,不限于上述状态。作为驾驶员的状态,可以包括反应时间、视线转移时间及清醒度之中至少任意一种,也可以包括其他状态。作为驾驶员的状态,也可以包括例如视野的大小及闭眼时间率之中的至少任意一种。
51.手动驾驶能力推定部12基于本车辆50的行驶状态、本车辆50的周围的行驶环境及驾驶员的反应之中的至少任意一种,推定驾驶员的手动驾驶能力。手动驾驶能力也被称为
“
胜任性(competence)”。手动驾驶能力是例如能够最大限度发挥的驾驶能力。基于例如驾驶员图像和内部传感器3的检测结果之中的至少任意一种来识别驾驶员的反应。在本车辆50的手动驾驶时,手动驾驶能力推定部12推定驾驶员的手动驾驶能力。手动驾驶能力能够分类为例如空间注意能力、空间认知能力、行动计划能力、判断能力(行动选择能力)及操作能力。
52.空间注意能力是与是否能够做出与任务要求相应的、对前方的注意力分配(例如在车间距离短时或车速快时,视线转移是否较短)相关的能力。手动驾驶能力推定部12基于尾随行驶时与前方车辆的车间距离及驾驶员的视线转移时间,推定空间注意能力。例如手动驾驶能力推定部12抽出时间进度(thw,time head way)为1秒以内的行驶场景的情况,计算在该行驶场景中1次的平均视线转移时间。在计算出的1次的平均视线转移时间为1秒以下的情况下,将空间注意能力推定为“高”,如果计算出的1次的平均视线转移时间比1秒长,则将空间注意能力推定为“低”(例如参照图2)。
53.空间认知能力是与空间认知的快慢相关的能力。手动驾驶能力推定部12基于在变道时(车道变更时)或进入汇流点时的驾驶员的侧方视觉辨识时间,推定空间认知能力。在侧方视觉辨识时间距预定时间的偏离量少的情况下,手动驾驶能力推定部12将空间认知能力推定为“高”,在除此之外的情况下,将手动驾驶能力推定为“低”。
54.例如在判定为本车辆50已变道的情况下,手动驾驶能力推定部12记录驾驶员的侧方视觉辨识时间。在向右侧车道变道的情况下,记录侧方视觉辨识时间的视线区域是相对于正面向右侧偏移的矩形区域,并且是包括右后视镜的区域aa(参照图3的(a))。并且,手动驾驶能力推定部12基于记录的侧方视觉辨识时间,使用图3的(b)所示的图,推定作为空间认知能力的手动驾驶能力的高低。在侧方视觉辨识时间比下限时间α1短的情况下和比上限时间α2长的情况下,能够将手动驾驶能力推定为“低”,在除此之外的情况下,能够将手动驾驶能力推动为“高”。手动驾驶能力推定部12也可以在本车辆50的周围的预定范围内不存在其他车辆的情况下执行这样的手动驾驶能力的推定。预定范围是预先确定而设定的值,可以是固定值,也可以是变动值。
55.行动计划能力是与是否能够在转向前做好目标路线计划相关的能力。行动计划能力是与是否能够进行ff(前馈)主体的驾驶或fb(反馈)主体的驾驶相关的能力。手动驾驶能力推定部12基于本车辆50进入弯道时的驾驶员的视线的位置,推定行动计划能力。例如手动驾驶能力推定部12计算在本车辆50进入弯道时驾驶员的视线通过扫视而朝向切点(t/p,tangent point)(进行了ff主体的驾驶)的概率。在计算出的概率比预定值高的情况下,将行动计划能力推定为“高”,在除此之外的情况下,将行动计划能力推定为“低”。
56.判断能力是与是否能够做出基于后述的操作能力及风险的行动选择相关的能力。手动驾驶能力推定部12基于经过障碍物的侧方时的本车辆50的转向量及车速,推定判断能力。例如在本车辆50经过障碍物的侧方的障碍物侧方经过时,驾驶员的转向的混乱量与本车辆50的车速的逆相关的程度大的情况下,手动驾驶能力推定部12将判断能力推定为“高”,在除此之外的情况下,将判断能力推定为“低”。
57.操作能力是与转向及刹车操作的混乱的多少相关的能力。手动驾驶能力推定部12基于在弯道行驶时或制动时的本车辆50的最大加速度及最大急动度,推定操作能力。例如在本车辆50进入弯道时或制动时将本车辆50的最大急动度除以最大加速度而得的值比预
定值小的情况下,手动驾驶能力推定部12将操作能力推定为“高”,在除此之外的情况下,将操作能力推定为“低”。
58.手动驾驶能力推定部12将空间注意能力、空间认知能力、行动计划能力、判断能力及操作能力之中的最坏的级别或最好的级别作为驾驶员的手动驾驶能力。或者手动驾驶能力推定部12将空间注意能力、空间认知能力、行动计划能力、判断能力及操作能力之中的存在的最多的级别作为驾驶员的手动驾驶能力。对手动驾驶能力的表现的方法并无特别限定,可以为数值,也可以分为多个级别。
59.驾驶准备度计算部13基于驾驶员状态推定部11推定出的驾驶员的状态及手动驾驶能力推定部12推定出的驾驶员的手动驾驶能力,计算与驾驶员的驾驶意识相关的驾驶准备度。在本车辆50的自动驾驶时,驾驶准备度计算部13计算驾驶准备度。驾驶准备度是指驾驶员对驾驶的信息处理能力的程度。驾驶准备度是指与驾驶员的驾驶意识的高度相应的程度。驾驶意识是指驾驶员操纵车辆时的包括认知、预测、判断、操作的心理活动的总称。
60.驾驶准备度是指驾驶员针对驾驶的准备的等级。驾驶准备度也称为“readiness”。驾驶员的驾驶意识及针对本车辆50的行驶环境的准备的程度越高,则驾驶准备度的值越大。作为一个例子,此处的驾驶准备度按值从小到大的顺序分为low(低)、medium(普通)及high(高)3个级别。对驾驶准备度的表现的方法并无特别限定,可以为数值,也可以分为多个级别。
61.驾驶准备度计算部13能够参照第1表格t1(参照图4),计算驾驶准备度。第1表格t1被预先确定,并存储于例如ecu 10的存储部(rom或ram)。在图4的第1表格t1的驾驶准备度中,“l”表示low,“m”表示medium,“h”表示high(以下同样)。在第1表格t1中,在手动驾驶能力为“低”且驾驶员状态为“低”的情况下,驾驶准备度为“l”,在手动驾驶能力为“高”且驾驶员状态为“高”的情况下,驾驶准备度为“h”,在除此之外的情况下,驾驶准备度为“m”。
62.任务要求推定部14推定作为对本车辆50的驾驶员要求的指标的任务要求。任务要求推定部14判定任务要求是high(高)、medium(普通)还是low(低)。任务要求是在本车辆50的驾驶从自动驾驶切换到手动驾驶之后所需的能力。任务要求推定部14基于本车辆50的周围的行驶环境及本车辆50的行驶状态,判定任务要求。
63.图5是说明任务要求的判定的一个例子的表。如图5所示,任务要求推定部14将本车辆50针对在前车辆(前方车辆)尾随行驶的尾随行驶时且作为与该在前车辆的车间时间的前方车间时间为1.0秒以上设为任务要求推定要素(a)。任务要求推定部14将本车辆50在弯道行驶时且根据当前车速预想的横向加速度小于2m/s2的情况设为任务要求推定要素(b)。在符合任务要求推定要素(a)、(b)这两者的情况下,任务要求推定部14将任务要求判定为“l(low)”。在符合任务要求推定要素(a)、(b)之中任意一方的情况下,任务要求推定部14将任务要求判定为“m(medium)”。在不符合任务要求推定要素(a)、(b)这两者的情况下,任务要求推定部14将任务要求判定为“h(high)”。
64.手动驾驶适宜判定部15基于任务要求及驾驶准备度,判定驾驶员的向手动驾驶的切换准备是否适宜。在驾驶准备度为任务要求以上的情况下,手动驾驶适宜判定部15判定为驾驶员的向手动驾驶的切换准备是适宜的。在驾驶准备度小于任务要求的情况下,手动驾驶适宜判定部15判定为驾驶员的向手动驾驶的切换准备不适宜。
65.手动驾驶适宜判定部15能够参照第2表格t2(参照图6)计算驾驶员是否适合手动
驾驶。第2表格t2被预先确定并存储于例如ecu 10的存储部(rom或ram)。在图6的第2表格t2中,“〇”表示驾驶员的向手动驾驶的切换准备是适宜的,
“×”
表示驾驶员的向手动驾驶的切换准备不适宜。在第2表格t2中,在驾驶准备度为“h”的情况下,驾驶员的手动驾驶为“〇”,在驾驶准备度为“m”而任务要求为“l”或“m”的情况下,驾驶员的手动驾驶为“〇”,在驾驶准备度为“l”而任务要求为“l”的情况下,驾驶员的手动驾驶为“〇”,在除此之外的情况下,驾驶员的手动驾驶为
“×”
。
66.返回到图1,在手动驾驶适宜判定部15判定为无法手动驾驶的情况下,hmi 6对驾驶员施加刺激。在针对驾驶员能够通过振动及气味之中至少一方来施加刺激时,在手动驾驶适宜判定部15判定为无法手动驾驶的情况下,hmi 6对驾驶员施加该刺激,以使驾驶准备度为任务要求以上。hmi 6显示手动驾驶适宜判定部15的判定结果。hmi 6构成刺激施加部及显示部。
67.接下来,关于ecu 10的上述各功能的处理,举出在本车辆50的手动驾驶时开始及终止自动驾驶的例子来进行说明。
68.如图7所示,例如本车辆50通过驾驶员的操作而启动,在开始了手动驾驶之后,由手动驾驶能力推定部12推定驾驶员的手动驾驶能力(步骤s1)。判定是否开始了自动驾驶(步骤s2)。在上述步骤s2中为“否”的情况下,返回到上述步骤s1的处理。在上述步骤s2中为“是”的情况下,由任务要求推定部14推定任务要求(步骤s3)。由驾驶员状态推定部11推定驾驶员的状态(步骤s4)。由驾驶准备度计算部13计算驾驶准备度(步骤s5)。
69.接下来,由手动驾驶适宜判定部15使用例如上述第2表格t2,判定驾驶准备度是否为任务要求以上(步骤s6)。在上述步骤s6中为“是”的情况下,判定为驾驶员的向手动驾驶的切换准备是适宜的(步骤s7)。在上述步骤s6中为“否”的情况下,判定为驾驶员的向手动驾驶的切换准备不适宜(步骤s8)。判定自动驾驶是否已终止(步骤s9)。在上述步骤s9中为“否”的情况下,返回到上述步骤s3的处理。上述步骤s9中为“是”的情况下,判定本车辆50的驾驶是否已终止(步骤s10)。在上述s10中为“否”的情况下,返回到上述步骤s1的处理。在上述s10中为“是”的情况下,终止处理。
70.接下来,对手动驾驶能力推定部12进行的手动驾驶能力的推定(上述步骤s1)的处理例子具体进行说明。
71.如图8所示,基于本车辆50的行驶状态及行驶环境,判定本车辆50是否已变道(步骤s11)。在上述步骤s11中为“是”的情况下,记录驾驶员的侧方视觉辨识时间(步骤s12)。根据记录的侧方视觉辨识时间,推定手动驾驶能力(步骤s13)。在上述步骤s11中为“否”的情况下,返回到上述步骤s11的处理。
72.或者如图9所示,基于本车辆50的行驶状态及行驶环境,判定本车辆50是否已变道(步骤s21)。上述步骤s21中为“是”的情况下,记录驾驶员的侧方视觉辨识时间(步骤s22)。基于本车辆50的行驶环境,判定在本车辆50的周围的预定范围内是否存在其他车辆(步骤s23)。预定范围是例如在变道的车道侧的从本车辆50到预定距离后方的范围。可以通过bsm(blind spot monitor,“盲点监视器”)检测预定范围。在上述步骤s23中为“否”的情况下,根据记录的侧方视觉辨识时间,推定手动驾驶能力(步骤s24)。在上述步骤s21为“否”的情况下或在上述步骤s23中为“是”的情况下,返回到上述步骤s21的处理。
73.以上,在驾驶意识推定装置100中,基于驾驶员的手动驾驶能力,计算驾驶准备度。
因此,与以往相比,能够考虑到例如驾驶员的手动驾驶能力带来的个体差异及手动驾驶能力所涉及的状态(头脑的清晰、手的疲劳等)的好坏导致的当日内变动,计算驾驶准备度。由此,能够精度良好地计算驾驶准备度。
74.在驾驶意识推定装置100中,手动驾驶能力推定部12可以基于车道变更时或进入汇流点时的驾驶员的侧方视觉辨识时间,推定手动驾驶能力。在该情况下,能够尤其基于驾驶员的手动驾驶能力之中的空间认知能力,计算驾驶准备度。
75.此时,在驾驶意识推定装置100中,也可以在本车辆50的周围的预定范围内不存在其他车辆的情况下,手动驾驶能力推定部12推定手动驾驶能力。由此,能够防止由于其他车辆的存在所引起的(例如为了估计与其他车辆的距离来判断是否可以变道)侧方视觉辨识时间延长,而错误地推定手动驾驶能力。能够避免错误地判断侧方视觉辨识时间长并将手动驾驶能力估计得低。
76.在驾驶意识推定装置100中,手动驾驶能力推定部12也可以基于尾随行驶时的与前方车辆的车间距离及驾驶员的视线转移时间,推定手动驾驶能力。在该情况下,能够尤其基于驾驶员的手动驾驶能力之中的空间注意能力,计算驾驶准备度。
77.在驾驶意识推定装置100中,手动驾驶能力推定部12也可以基于进入弯道时的驾驶员的视线的位置,推定手动驾驶能力。在该情况下,能够尤其基于驾驶员的手动驾驶能力之中的行动计划能力,计算驾驶准备度。
78.在驾驶意识推定装置100中,手动驾驶能力推定部12也可以基于经过障碍物的侧方时的本车辆50的转向量及车速,推定手动驾驶能力。在该情况下,能够尤其基于驾驶员的手动驾驶能力之中的判断能力(行动选择能力),计算驾驶准备度。
79.在驾驶意识推定装置100中,手动驾驶能力推定部12也可以基于弯道行驶时或制动时的本车辆50的最大加速度及最大急动度,推定手动驾驶能力。在该情况下,能够尤其基于驾驶员的手动驾驶能力之中的操作能力,计算驾驶准备度。
80.在驾驶意识推定装置100中,具备推定任务要求的任务要求推定部14和基于任务要求及驾驶准备度判定驾驶员的向手动驾驶的切换准备是否适宜的手动驾驶适宜判定部15。由此,能够利用任务要求及驾驶准备度,精度良好地判定向手动驾驶的切换准备是否适宜。
81.在驾驶意识推定装置100中,在手动驾驶能力推定部12判定为向手动驾驶的切换准备不适宜的情况下,hmi 6对驾驶员施加刺激。由此,在判定为驾驶员向手动驾驶的切换准备不适宜的情况下,能够敦促驾驶员提高驾驶准备度。
82.在驾驶意识推定装置100中,hmi 6显示手动驾驶适宜判定部15的判定结果。由此,能够将向手动驾驶的切换准备是否适宜的判定结果反馈给驾驶员等。
83.在驾驶意识推定装置100中,在本车辆50的手动驾驶时,手动驾驶能力推定部12推定驾驶员的手动驾驶能力。由此,能够精度良好地推定手动驾驶能力。
84.在驾驶意识推定装置100中,在本车辆50的自动驾驶时,驾驶员状态推定部11推定驾驶员的状态,驾驶准备度计算部13计算驾驶准备度。由此,能够将在自动驾驶期间获得的驾驶员的状态及驾驶准备度用于判定向接替该自动驾驶的手动驾驶的切换准备是否适宜。
85.以上,对本公开的一个方式所涉及的实施方式进行了说明,但本公开的一个方式不限于上述实施方式。本公开的一个方式不仅能够通过上述实施方式实施,而且能够通过
基于本领域普通技术人员的知识做出了各种变更、改良而成的各种方式来实施。
86.在上述实施方式中,并非必须与自动驾驶ecu 7连接,也并非必须构成自动驾驶系统的一部分。本公开的一个方式也能够应用于不执行自动驾驶的本车辆。在上述实施方式中,使用预先设定的表格来推定驾驶准备度,但也可以使用预先设定的运算式来推定驾驶准备度。在上述实施方式中,驾驶意识推定装置100也可以构成执行本车辆50的自动驾驶的自动驾驶系统的一部分。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1