为电驱动机动车辆的至少一个牵引电池充电的方法和系统与流程
1.本发明涉及一种为电驱动机动车辆的至少一个牵引电池充电的方法,其中,在牵引操作中通过牵引车辆来牵引机动车辆。此外,本发明涉及一种为电驱动机动车辆的至少一个牵引电池充电的系统,该系统包含至少一辆电驱动机动车辆和用于在牵引操作中牵引该机动车辆的至少一辆牵引车辆。
背景技术:
2.与包含内燃发动机的机动车辆相比,现代电驱动机动车辆的长途旅行更耗时。其原因在于,现代牵引电池的能量容量小于充满液体燃料的燃料箱的能量容量,这使得为牵引电池充电需要比添加液体燃料的加油停车更多的充电停车。另外,充电过程比加油过程需要更多的时间。此外,充电站的可用性相对较低,并且充电站处的车辆通过量明显小于加油站处的车辆通过量。
3.随着电驱动机动车辆的百分比的增加,在高速公路区域中对充电选择的需求不断增长,并且至少在高峰时段(例如在假期开始时和/或假期结束时),这种需求远远大于目前在高速公路上提供的可能性。
4.出版物us 6 866 350 b2公开了在车辆由牵引车辆牵引时电动车辆的再生制动器的激活,以便给车辆的电池充电并且制动车辆。如果牵引车辆的驾驶员激活牵引车辆的制动器,则电动车辆执行与来自牵引车辆的制动信号成比例的再生制动过程。如果电动车辆无意中与牵引车辆和电动车辆之间的连接器分离,则电动车辆还会执行再生制动程序。
5.出版物nl 1 030 159 c1公开了存储在制动过程中通过用作发电机的制动器产生的电能。这些电能存储在电池中,以备将来使用,例如用于在建筑物密集地区的行程中或在山丘上驾驶车辆的目的。该驱动器由连接到拖车车轮的电动马达提供。电池位于拖车下方。
6.出版物us 6 516 925 b1公开了一种用于制动拖车的系统,该系统包含轴单元并且被车辆拉动。该系统包括至少一个电机以及至少一个传感器,该电机耦合到轮轴单元,该至少一个传感器以这样的方式起作用:该至少一个传感器测量拖车的特征并且产生表示所测量的特征的第一信号。另外,该系统包含控制器,该控制器通过通信技术连接到电机和传感器,其中该控制器以这样的方式是有效的:接收第一信号,并且基于第一信号将第二信号选择性地输出至电机,其中,第二信号使电机在轴单元上施加再生的制动力矩,使得拖车被制动并且由此产生电能。
7.出版物us 7 743 859 b2公开了一种拖车,该拖车具有一对可旋转地连接至拖车框架的轮子。可以操作马达以给至少一个车轮提供驱动扭矩。能量存储装置附接到车架并且可以被操作以便有选择地向马达提供能量。负载传感器可以被操作以便输出指示在拖车和牵引车辆之间传递的负载的大小的信号。可以对控制器进行操作,使其响应传感器信号生成控制信号。控制信号控制马达的运行。
8.出版物us 6 668 225 b2公开了一种用于组合车辆的控制系统,该控制系统包含牵引机和车辆拖车。该控制系统包含计算机、可被该计算机访问的存储设备、可操作地连接
至该计算机的传感器、来自该计算机的输出信号以及用于车辆拖车的车轮的至少两个制动控制单元,其中制动器控制单元连接到计算机并且计算机从组合车辆的传感器接收输入信号以及计算机计算制动动作以控制组合车辆的动作。
9.出版物us 7 712 760 b2公开了牵引装置、电动车辆和用于牵引电动车辆的牵引车辆的组合。该电动车辆包含:用于通过逆变器从存储装置向驱动马达供电的高压线路;控制该存储装置的存储装置控制单元;用于控制驱动马达和高压线路的车辆控制单元;用于向逆变器、存储装置控制单元和车辆控制单元提供电压的低压线路,以及电动车辆包含用于在车辆控制单元、逆变器和存储装置控制单元之间传输信号的通信网络。牵引装置包含被安装在电动车辆和牵引车辆之间并且将牵引车辆的牵引力传递到电动车辆的连接工具、以及通信电缆,该通信电缆被可释放地连接到连接的连接器,该连接的连接器连接到通信网络以及连接设置在牵引车辆中的驱动马达优先控制单元到车辆控制单元。牵引装置还包含供电电缆,该供电电缆可释放地连接至供电连接,该供电连接连接至低压线路并且将设置在牵引车辆中的电源/电压源连接至低压线路。
10.出版物us 8 700 284 b公开了一种用于牵引车辆的制动系统,该制动系统包含用于将牵引车辆附接到牵引车辆的牵引元件,其中该牵引车辆包含牵引发动机和牵引电池。另外,制动系统包含用于测量牵引元件中的牵引载荷的传感器和被编程为基于牵引载荷来控制被牵引车辆的再生制动过程的计算机。
11.出版物ep 3 388 297 a1公开了一种具有拖车杆的车辆拖车,该车辆拖车包括拖车杆壳体和拖车杆、用于回收通过制动的车辆拖车产生的能量的能量回收装置以及用于控制能量回收装置的电子控制单元。车辆拖车包含具有超速制动装置的制动系统,其中拖车杆可以插入牵引杆壳体中。电连接至控制单元的测力装置设置在牵引杆上,以测量牵引杆的轴向力。提供了一种与牵引杆配合的夹紧装置,并且在车辆拖车的向前行驶期间,当牵引杆推力低于确定的牵引杆推力极限值时,该夹紧装置防止牵引杆插入到牵引杆壳体中,并且当牵引杆推力高于该牵引杆推力值时,允许将牵引杆插入牵引杆壳体。
技术实现要素:
12.本发明的目的是增加用于电驱动车辆的充电可行性的可用性。
13.根据本发明,该目的通过具有权利要求1的特征的方法来实现,根据该方法,在牵引操作期间,使机动车辆的至少一个能量回收制动器保持连续地激活。
14.参照以下事实:在下面的描述中单独提到的特征和措施可以以任何技术上便利的方式彼此组合,并说明本发明的其他实施例。该描述特别结合附图来表征和说明本发明。
15.根据本发明,为了在能量回收制动器的能量回收操作中给机动车辆的牵引电池充电,特别是电动车辆或混合动力电动车辆的电驱动车辆借助于牵引车辆在整个牵引操作期间(换句话说,在牵引车辆正在拉动机动车辆行驶时或者至少只要机动车辆连接到牵引车辆的牵引单元上)通过激活的能量回收制动器被拉动。结果,由于在充电过程中机动车辆沿目的地的方向移动,因此减少了在固定的充电站处连接到常规充电桩的机动车辆的行程时间的增加。
16.此外,机动车辆自身的能量回收制动系统可以用于对牵引电池进行快速充电,从而在牵引车辆或机动车辆中无需提供车辆自身的充电设备和附加的充电基础设施,从而降
低了成本并减轻了重量。
17.由于机动车辆位于行驶中的牵引车辆的滑流中,因此减少了彼此连接的两辆车辆的总消耗。由于在牵引操作期间牵引车辆与机动车辆之间的距离减小,因此可以最佳地利用道路上的可用空间。
18.此外,本发明使得可以额外使用牵引车辆,以提供通常需要付费的服务,即给电驱动机动车辆的牵引电池充电。因此,牵引车辆可以例如根据荷电状态,换句话说取决于牵引力的过量,来对机动车辆中的牵引电池进行充电,可以使用牵引车辆产生并且在当前荷电状态期间以及尤其是在空载行程期间仍然可用的牵引力。
19.借助于具有内燃发动机的牵引车辆,可以非常高效地提供被牵引的机动车辆所需的以及由于牵引阻力和充电容量而必需的附加能量,其中,该牵引车辆的内燃发动机的负载随后被取代,因为结果是内燃发动机的摩擦损失被保持在恒定水平,以及因此附加的燃料消耗和附加的功率输出之间的比率是有利的。
20.电驱动机动车辆的牵引电池可以以常规的方式构成并且安装在机动车辆中。牵引电池包含多个电池单元,特别是锂离子电池单元。能量回收制动器同样可以以常规方式实施。
21.牵引车辆例如可以是运输车、重型车辆、公路火车、半挂车等,但是也可以是具有适当性能特征的乘用车。牵引车辆可以包含内燃发动机并且具有高拖拉能力。牵引车辆配备有至少一个牵引单元,该牵引单元可以连接到机动车辆以便能够牵引机动车辆。机动车辆可以包含与牵引单元相匹配的配合件,以及该配合件可以被连接至牵引单元,以便将机动车辆附接至牵引车辆。
22.根据一种有利实施方式,在牵引车辆的行驶过程中,机动车辆至少间接地附接到牵引车辆上。机动车辆可以例如在机动车辆的部分自动或全自动驾驶操作中例如通过机动车辆的自动转向程序和自动接近控制程序附接到行驶的牵引车辆上。换句话说,在行驶过程中可以附接或断开机动车辆。因此,不必停止驾驶操作,结果是根据本发明的驾驶体验更加有效。
23.另一有利实施方式提供了机动车辆直接附接在牵引车辆上或附接到由牵引车辆牵引的至少一个机动车辆上。在第一替代方案的情况下,机动车辆可以连接到牵引车辆的牵引单元。在第二替代方案的情况下,机动车辆可以被附接到电驱动机动车辆,电驱动机动车辆自身直接被附接到牵引车辆。结果,牵引车辆也可以牵引相对于彼此成排布置的两个或更多个电驱动机动车辆。
24.根据另一有利实施方式,通过以下方式为机动车辆单独地选择牵引车辆:与牵引车辆有关的至少一条信息在网络平台上以电子方式和与机动车辆有关的至少一条信息进行比较,其中多条信息已通过牵引车辆或机动车辆预先传输到网络平台。结果,可以比较网络平台上的多条信息,以便能够确定是否存在沿机动车辆的行驶方向行驶的牵引车辆,是否存在具有足够的牵引力来牵引机动车辆的牵引车辆,该牵引车辆是否具有合适的行驶速度等。如果是这种情况,换句话说,如果由牵引车辆提供的供给与机动车辆的要求相匹配,则可以选择牵引车辆并且导航系统可以通知机动车辆的驾驶员。机动车辆随后可以接近牵引车辆,以便将机动车辆附接到牵引车辆。
25.根据另一有利的实施方式,在牵引操作期间以使得机动车辆的所有车轮在所行进
的表面上滚动这样的方式操作机动车辆。结果,在牵引操作期间仍可以转向机动车辆。牵引车辆仅需要拉动机动车辆而不必部分地升高机动车辆。在这种情况下,在能量回收操作中可以操作分配给前轮和/或后轮或其他元件的能量回收制动器。可以通过集成在中央控制单元(cpu)中的控制单元来单独控制能量回收制动器,从而在牵引操作期间激活至少一个、多个或每个能量回收制动器并且使其保持激活状态。可以根据牵引电池的荷电状态来使能量回收制动器相应地激活,并且该荷电状态被更新地存储在控制装置或cpu中。
26.在另一有利的实施方式中提供了在牵引操作期间,机动车辆至少部分地在自主驾驶操作中和/或至少部分地在考虑牵引车辆的行驶参数的情况下由车辆控制器操作。在这种情况下,机动车辆也可以在变道期间以自动的方式跟随牵引车辆。
27.根据另一有利的实施方式,在牵引操作期间以仅机动车辆的后轮在所行进的表面上滚动这样的方式操作机动车辆,其中后轮受到能量回收制动器的制动力的影响。在这种情况下,机动车辆的可转向前轮被抬起,结果是它们不与所行进的表面接触。因此,机动车辆至少不能通过前轮转向。然而,通过可转向的后轮来转向它们是可行的。如在先前的情况中一样,在至少一个该实施方式的情况下,多个或每个能量回收制动器可以被控制,但是在这种情况下,排除分配给前轮的能量回收制动器。
28.此外,通过具有权利要求8的特征的系统来实现上述目的,该系统的机动车辆被配置为在牵引操作期间保持机动车辆的至少一个能量回收制动器连续地被激活。
29.上面关于方法提到的优点相应地与系统相关联。特别地,该系统可以用于执行根据上述实施例之一或根据这些实施例中的至少两个彼此的组合的方法。该系统还可以包含两辆或更多辆(尤其是多辆)电驱动机动车辆和牵引车辆。
30.根据该系统的一有利的实施方式,在牵引车辆的驾驶过程中,机动车辆至少间接地附接到牵引车辆。机动车辆可以例如在机动车辆的部分自动或全自动驾驶操作中例如通过机动车辆的自动转向程序和自动接近控制程序附接到驾驶牵引车辆上。换句话说,在行驶过程中可以附接或断开机动车辆。因此,不必停止驾驶操作,结果是根据本发明的系统更加有效。上面关于方法的相应实施方式提到的优点因此与该实施例相关联。
31.根据一个有利的实施方式,机动车辆配置为牵引另一电驱动机动车辆。为此,机动车辆可以包含牵引单元,该牵引单元可以连接到另一机动车辆,而机动车辆本身通过牵引车辆的牵引单元连接。上面关于方法的相应实施例提到的优点因此与该实施例相关联。
32.另一有利的实施方式提供了该系统包含至少一个网络平台,该至少一个网络平台可以通过通信技术与牵引车辆和机动车辆相连接,其中,为了能够为机动车辆单独选择牵引车辆,该网络平台被配置为将与牵引车辆有关并且由牵引车辆传输到网络平台的至少一条信息和与机动车辆有关并且由机动车辆传输到网络平台的至少一条信息彼此进行电子地比较。上面关于方法的相应实施例提到的优点因此与该实施例相关联。
33.根据另一种有利的实施方式,牵引车辆包含至少一个后侧牵引单元,该至少一个后侧牵引单元可以与机动车辆连接并且以如下方式实施:在机动车辆连接至牵引单元上的牵引操作期间,机动车辆的所有车轮都在所行进的表面上滚动。在这种情况下,可以在能量回收操作中操作分配给前轮和/或后轮或其他元件的能量回收制动器。可以通过集成在中央控制单元(cpu)中的控制单元来单独控制能量回收制动器,从而在牵引操作期间激活至少一个、多个或每个能量回收制动器并且使其保持激活状态。可以根据牵引电池的荷电状
态来使能量回收制动器相应地激活,并且该荷电状态被更新地存储在控制装置或cpu中。上面关于方法的相应实施方式提到的优点因此与该实施方式相关联。
34.根据另一有利的实施方式,机动车辆被配置为使得在牵引操作期间由机动车辆的车辆控制器至少部分地在自主驾驶操作中或至少部分地在考虑牵引车辆的行驶参数的情况下进行操作。上面关于方法的相应实施例提到的优点因此与该实施方式相关联。
35.在另一有利的实施方式中规定,牵引车辆包含与机动车辆连接的至少一个后侧牵引单元,并且该牵引车辆以这样的方式构成:在机动车辆连接至牵引单元的牵引操作期间,仅机动车辆的后轮在所行进的表面上滚动。因此,机动车辆至少不能通过前轮转向。然而,通过可转向的后轮来转向它们是可行的。如在先前的情况中一样,在该实施方式的情况下,至少一个、多个或每个能量回收制动器可以被控制,但是在这种情况下,排除分配给前轮的能量回收制动器。上面关于方法的相应实施方式提到的优点因此与该实施方式相关联。
附图说明
36.在从属权利要求和附图的以下描述中公开了本发明的进一步的有利实施方式。在附图中:
37.图1示出了根据本发明的系统的示例性实施方式的示意图,以及
38.图2示出了根据本发明的系统的另一示例性实施方式的示意图。
39.在不同的附图中,相似的部件总是配备有相同的附图标记,因此,它们通常也仅被描述一次。
具体实施方式
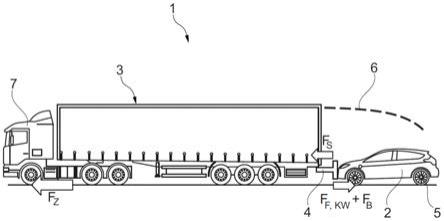
40.图1示出了根据本发明的系统1的示例性实施方式的示意图,该系统1用于为电驱动机动车辆2的至少一个牵引电池(未示出)充电。
41.系统1包含至少一辆电驱动机动车辆2和用于在牵引操作中牵引机动车辆2的半拖车形式的至少一辆牵引车辆3。为此,牵引车辆3包含后侧牵引单元4(示意性地示出),该后侧牵引单元4与机动车辆2连接并且以这样的方式实施:在机动车辆2连接至牵引单元4的牵引操作期间,机动车辆2的所有车轮5都在所行进的表面(未示出)上滚动。在牵引操作期间,机动车辆2位于牵引车辆3的所示滑流6中。
42.机动车辆2配置为在牵引操作期间保持机动车辆2的能量回收制动(未示出)连续地被激活。在这种情况下,机动车辆2还配置为使得在牵引操作期间由机动车辆2的车辆控制器(未示出)至少部分地在自主驾驶操作中或至少部分地在考虑到牵引车辆3的行驶参数的情况下被操作。机动车辆2可以配置为牵引另外的电驱动机动车辆(未示出)。
43.牵引车辆3或其牵引机7产生牵引力f
z
。该拉力f
z
提供了用于牵引机动车辆2的牵引力f
s
。该牵引力f
s
除了抵消机动车辆2的行驶阻力f
f,kw
之外,还抵消了机动车辆2的能量回收制动力f
b
。以下等式适用:
44.f
z
=f
f,sw
+f
s
=f
f,sw
+f
f,kw
+f
b
,
45.其中,f
f,sw
代表牵引车辆3的行驶阻力,以及如上所述,f
f,kw
代表机动车辆2的行驶阻力。
46.此外,系统1可以包括网络平台(未示出),该网络平台可以通过通信技术连接到牵
引车辆3和机动车辆2,其中,为了能够为机动车辆2单独选择牵引车辆3,该网络平台被配置为使得将与牵引车辆3有关并且由牵引车辆3传输到网络平台的至少一条信息和与机动车辆2有关并且由机动车辆2传输到网络平台的至少一条信息彼此进行电子地比较,,并且向机动车辆2或其驾驶员指示牵引车辆3位于何处。
47.图2示出了根据本发明的系统8的另一示例性实施方式的示意图,该系统8用于为电驱动机动车辆2的至少一个牵引电池(未示出)充电。系统8不同于图1中示出的示例性实施方式,仅由于牵引车辆9包含后侧牵引单元10,该后侧牵引单元10连接到机动车辆2并且以如下方式实施:在机动车辆2连接至牵引单元10的牵引操作期间,仅机动车辆2的后轮5在所行进的表面上滚动(未示出)。为了避免重复,此外参考以上关于图1的描述。
48.附图标记列表
[0049]1ꢀꢀꢀ
系统
[0050]2ꢀꢀꢀ
机动车辆
[0051]3ꢀꢀꢀ
牵引车辆
[0052]4ꢀꢀꢀ
3的牵引单元
[0053]5ꢀꢀꢀ
2的车轮
[0054]6ꢀꢀꢀ
滑流
[0055]7ꢀꢀꢀ
3的牵引机
[0056]8ꢀꢀꢀ
系统
[0057]9ꢀꢀꢀ
牵引车辆
[0058]
10
ꢀꢀ
9的牵引单元
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1