输出轴驱动检测方法及系统与流程
1.本发明涉及新能源电动控制技术领域,尤其涉及输出轴驱动检测方法及系统。
背景技术:
2.现有混合动力驱动系统中通常由整车控制器(vehicle control unit,vcu)/自动变速箱控制单元(transmission control unit,tcu)来获取用于计算输出轴扭矩的多个参数,以基于多个参数计算混合动力汽车的输出轴转速。
3.但是在一些情况下vcu/tcu获取的多个参数可能具有一些无效参数,此情况下便无法基于多个参数计算混合动力汽车的输出轴转速。
技术实现要素:
4.鉴于此,本发明提供输出轴驱动检测方法及系统,可以采用整车控制器和电机控制器独立的对输出轴进行监控,在具有电机控制器作为冗余监控方式的情况下,可以尽可能保证对混合动力汽车的输出轴扭矩进行监控。
5.为了实现上述目的,本技术提供了下述技术特征:
6.一种输出轴驱动检测方法,包括:
7.整车控制器确定变速箱输出轴的第一实际扭矩和第一实际扭矩阈值,若确定所述第一实际扭矩大于第一实际扭矩阈值,则触发混合动力汽车进入安全状态;
8.电机控制器确定变速箱输出轴的第二实际扭矩和第二实际扭矩阈值,若确定所述第二实际扭矩大于第二实际扭矩阈值,则触发混合动力汽车进入安全状态。
9.可选的,所述整车控制器确定变速箱输出轴的第一实际扭矩和第一实际扭矩阈值包括:
10.所述整车控制器获取混合动力汽车的第一参数集,其中所述第一参数集包括第一加速踏板传感器采集第一加速踏板信号;
11.从所述电机控制器获取第二加速踏板传感器采集第二加速踏板信号以及电机功能层估算的实际扭矩;
12.基于所述第一参数集、所述第二加速踏板信号以及电机功能层估算的实际扭矩,计算所述第一实际扭矩和所述第一实际扭矩阈值。
13.可选的,所述整车控制器获取混合动力汽车的第一参数集包括:
14.所述整车控制器通过第一加速踏板传感器采集第一加速踏板信号;
15.所述整车控制器通过输出轴转速传感器采集输出轴转速;
16.所述整车控制器通过离合器位置传感器采集离合器位置;
17.所述整车控制器通过同步器位置传感器采集同步器位置;
18.所述整车控制器通过输入轴转速传感器采集输入轴转速;
19.所述整车控制器通过发动机控制器接收发动机功能层估算的实际扭矩。
20.可选的,所述基于所述第一参数集和所述第二加速踏板信号,计算所述第一实际
扭矩和所述第一实际扭矩阈值,包括:
21.所述整车控制器通过所述第一加速踏板信号、所述第二加速踏板信号、所述输出轴转速计算输出轴的所述第一实际扭矩阈值;
22.所述整车控制器通过离合器位置估算离合器状态;
23.所述整车控制器通过同步器位置估算电机的档位信息和发动机档位信息;
24.所述整车控制器通过所述离合器状态、所述档位信息和所述发动机功能层输出的实际扭矩以及电机功能层估算的实际扭矩,计算传递至混合动力汽车轮端的第一实际扭矩。
25.可选的,所述电机控制器确定变速箱输出轴的第二实际扭矩和第二实际扭矩阈值,包括:
26.所述电机控制器获取混合动力汽车的第二参数集,其中所述第二参数集包括第二加速踏板传感器采集第二加速踏板信号;
27.从所述整车控制器获取第一加速踏板传感器采集第一加速踏板信号;
28.基于所述第二参数集和所述第一加速踏板信号,计算所述第二实际扭矩和所述第二实际扭矩阈值。
29.可选的,所述电机控制器获取混合动力汽车的第二参数集包括:
30.所述电机控制器通过第二加速踏板传感器采集第二加速踏板信号;
31.所述电机控制器从外部系统接收车速信号;
32.所述电机控制器通过电机轴转速传感器采集电机转速;
33.所述电机控制器从发动机控制器接收发动机功监控层估算的实际扭矩和发动机转速;
34.所述整车控制器通过输入轴转速传感器采集输入轴转速。
35.可选的,所述基于所述第二参数集和所述第一加速踏板信号,计算所述第二实际扭矩和所述第二实际扭矩阈值,包括:
36.所述电机控制器通过所述第一加速踏板信号、所述第二加速踏板信号和所述车速信号计算第二实际扭矩阈值;
37.所述电机控制器通过车速信号和电机转速估计电机档位信息;
38.所述电机控制器通过输入轴转速和车速信号估计发动机档位信息;
39.所述电机控制器通过发动机转速、输入轴转速和发动机监控层估算的实际扭矩确定离合器状态;
40.所述电机控制器通过电机档位信息、发动机档位信息、发动机监控层估算的实际扭矩、离合器状态和电机监控层估算的实际扭矩,计算传递至混合动力汽车轮端的第二实际扭矩。
41.一种输出轴驱动检测系统,包括:
42.连接第一加速踏板传感器的第一整车控制器,用于确定变速箱输出轴的第一实际扭矩和第一实际扭矩阈值,若确定所述第一实际扭矩大于第一实际扭矩阈值,则触发混合动力汽车进入安全状态;
43.连接第二加速踏板传感器的电机控制器,用于确定变速箱输出轴的第二实际扭矩和第二实际扭矩阈值,若确定所述第二实际扭矩大于第二实际扭矩阈值,则触发混合动力
汽车进入安全状态。
44.通过以上技术手段,可以实现以下有益效果:
45.本发明可以采用整车控制器和电机控制器两个独立设备对输出轴进行监控,在整车控制器获取到无效参数的情况下,还可以采用电机控制器获取到的参数对输出轴进行监控,同理,在电机控制器获取到无效参数的情况下,还可以采用整车控制器获取到的参数对输出轴进行监控。
46.整车控制器和电车控制器相互独立、冗余方式,均对输出轴扭矩进行监控,并且可以独立进入安全状态,保证混合动力汽车的输出轴扭矩安全。
附图说明
47.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
48.图1为本发明实施例公开的一种输出轴驱动检测系统的结构示意图;
49.图2为本发明实施例公开的一种输出轴驱动检测方法的示意图;
50.图3为本发明实施例公开的又一种输出轴驱动检测方法的示意图。
具体实施方式
51.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
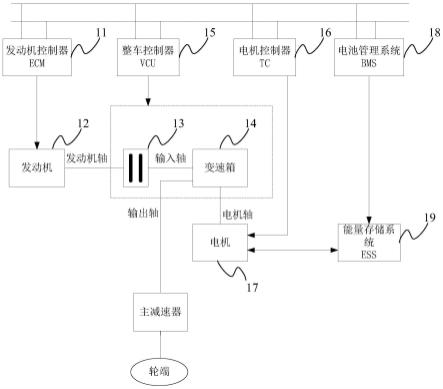
52.本技术提供了一种输出轴扭矩检测系统,参见图1,包括:
53.与总线相连的发动机控制器(engine control module,ecm)11。
54.与发动机控制器11相连的发动机12。
55.与发动机12通过发动机轴(combust engine shaft,ces)相连的离合器13。
56.与离合器13通过输入轴(input shaft,ips)相连的变速箱14,变速箱14通过输出轴(output shaft,ops)连接主减速器,主减速器连接汽车轮端。
57.与总线相连的整车控制器(vehicle controlunit,vcu)/自动变速箱控制单元(transmission control unit,tcu)15,简称vcu/tcu。vcu/tcu用于控制变速箱14和离合器13,也即图示中虚线框中内容。
58.与总线相连的电机控制器(traction motor controller,tc)16。
59.与电机控制器16相连的电机17,电机17通过电机轴(e-motor shaft)连接变速箱14。
60.与总线相连的电池管理系统(battery management system)18。
61.与电池管理系统18相连的能量存储系统(energy storage system,ess)19,能量存储系统19与电机17相连。
62.本技术提供输出轴驱动检测方法实施例一,应用于图1所述的输出轴扭矩检测系
统。参见图2,输出轴驱动检测方法可以包括:
63.整车控制器确定变速箱输出轴的第一实际扭矩和第一实际扭矩阈值,若确定所述第一实际扭矩大于第一实际扭矩阈值,则触发混合动力汽车进入安全状态。
64.s11:所述整车控制器获取混合动力汽车的第一参数集,其中所述第一参数集包括第一加速踏板传感器采集第一加速踏板信号。
65.s12:从所述电机控制器获取第二加速踏板传感器采集第二加速踏板信号以及电机功能层估算的实际扭矩。
66.s13:基于所述第一参数集、所述第二加速踏板信号以及电机功能层估算的实际扭矩,计算所述第一实际扭矩和所述第一实际扭矩阈值。
67.s14:若确定所述第一实际扭矩大于第一实际扭矩阈值,则触发混合动力汽车进入安全状态。
68.电机控制器确定变速箱输出轴的第二实际扭矩和第二实际扭矩阈值,若确定所述第二实际扭矩大于第二实际扭矩阈值,则触发混合动力汽车进入安全状态。
69.s21:所述电机控制器获取混合动力汽车的第二参数集,其中所述第二参数集包括第二加速踏板传感器采集第二加速踏板信号。
70.s22:从所述整车控制器获取第一加速踏板传感器采集第一加速踏板信号。
71.s23:基于所述第二参数集和所述第一加速踏板信号,计算所述第二实际扭矩和所述第二实际扭矩阈值。
72.s24:若确定所述第二实际扭矩大于第二实际扭矩阈值,则触发混合动力汽车进入安全状态。
73.通过上述技术特征可知本发明具有如下有益效果:
74.本发明可以采用整车控制器和电机控制器两个独立设备对输出轴进行监控,在整车控制器获取到无效参数的情况下,还可以采用电机控制器获取到的参数对输出轴进行监控,同理,在电机控制器获取到无效参数的情况下,还可以采用整车控制器获取到的参数对输出轴进行监控。
75.整车控制器和电车控制器相互独立、冗余方式,均对输出轴扭矩进行监控,从而可以尽可能保证在可以计算得到输出轴扭矩,尽可能保证对混合动力汽车的输出轴扭矩进行监控。
76.此外,整车控制器采用第一参数集来计算输出轴的实际扭矩,电机控制器采用第二参数集计算输出轴的实际扭矩,虽然第一参数集和第二参数集可以有交集,但是一些参数还是不同的且计算实际扭矩的过程也是不同的,其目的是为了避免一些参数无效导致计算过程也无效时,整车控制器和电机控制器两种独立监控方式同时失效。
77.本技术提供输出轴驱动检测方法实施例二,应用于上述输出轴扭矩检测系统。参见图3,输出轴驱动检测方法可以包括:
78.所述整车控制器通过第一加速踏板传感器采集第一加速踏板信号;
79.所述整车控制器通过输出轴转速传感器采集输出轴转速;
80.所述整车控制器通过离合器位置传感器采集离合器位置;
81.所述整车控制器通过同步器位置传感器采集同步器位置;
82.所述整车控制器通过输入轴转速传感器采集输入轴转速;
83.所述整车控制器通过发动机控制器接收发动机功能层输出的实际扭矩。
84.所述整车控制器通过所述第一加速踏板信号、所述第二加速踏板信号、所述输出轴转速计算输出轴的所述第一实际扭矩阈值;
85.所述整车控制器通过离合器位置估算离合器状态;
86.所述整车控制器通过同步器位置估算电机的档位信息和发动机的档位信息;
87.所述整车控制器通过所述离合器状态、所述档位信息、所述发动机功能层输出的实际扭矩以及电机功能层输出的实际扭矩,计算传递至混合动力汽车轮端的第一实际扭矩。
88.若确定所述第一实际扭矩大于第一实际扭矩阈值,则触发混合动力汽车进入安全状态。
89.所述电机控制器通过第二加速踏板传感器采集第二加速踏板信号;
90.所述电机控制器从外部系统接收车速信号;
91.所述电机控制器通过电机轴转速传感器采集电机转速;
92.所述电机控制器从发动机控制器ecm接收发动机功能层输出的实际扭矩和发动机转速;
93.所述整车控制器通过输入轴转速传感器采集输入轴转速。
94.所述电机控制器通过所述第一加速踏板信号、所述第二加速踏板信号和所述车速信号计算第二实际扭矩阈值;
95.所述电机控制器通过车速信号和电机转速估计电机档位信息;
96.所述电机控制器通过输入轴转速和车速信号估计发动机档位信息;
97.所述电机控制器通过发动机转速、输入轴转速和发动机监控层估算的实际扭矩确定离合器状态;
98.所述电机控制器通过电机档位信息、发动机档位信息、发动机监控层估算的实际扭矩、离合器状态和电机监控层估算的实际扭矩,计算传递至混合动力汽车轮端的第二实际扭矩。
99.若确定所述第一实际扭矩大于第一实际扭矩阈值,则触发混合动力汽车进入安全状态。
100.参见图1,本技术还提供了一种输出轴驱动检测系统,包括:
101.连接第一加速踏板传感器的第一整车控制器,用于确定变速箱输出轴的第一实际扭矩和第一实际扭矩阈值,若确定所述第一实际扭矩大于第一实际扭矩阈值,则触发混合动力汽车进入安全状态;
102.连接第二加速踏板传感器的电机控制器,用于确定变速箱输出轴的第二实际扭矩和第二实际扭矩阈值,若确定所述第二实际扭矩大于第二实际扭矩阈值,则触发混合动力汽车进入安全状态。
103.其中,所述整车控制器确定变速箱输出轴的第一实际扭矩和第一实际扭矩阈值包括:
104.所述整车控制器获取混合动力汽车的第一参数集,其中所述第一参数集包括第一加速踏板传感器采集第一加速踏板信号;
105.从所述电机控制器获取第二加速踏板传感器采集第二加速踏板信号以及电机功
能层估算的实际扭矩;
106.基于所述第一参数集、所述第二加速踏板信号以及电机功能层估算的实际扭矩,计算所述第一实际扭矩和所述第一实际扭矩阈值。
107.其中,所述整车控制器获取混合动力汽车的第一参数集包括:
108.所述整车控制器通过第一加速踏板传感器采集第一加速踏板信号;
109.所述整车控制器通过输出轴转速传感器采集输出轴转速;
110.所述整车控制器通过离合器位置传感器采集离合器位置;
111.所述整车控制器通过同步器位置传感器采集同步器位置;
112.所述整车控制器通过输入轴转速传感器采集输入轴转速,并发送至电机控制器;
113.所述整车控制器通过发动机控制器接收发动机功能层输出的实际扭矩。
114.其中,所述基于所述第一参数集和所述第二加速踏板信号,计算所述第一实际扭矩和所述第一实际扭矩阈值,包括:
115.所述整车控制器通过所述第一加速踏板信号、所述第二加速踏板信号、所述输出轴转速计算输出轴的所述第一实际扭矩阈值;
116.所述整车控制器通过离合器位置估算离合器状态;
117.所述整车控制器通过同步器位置估算电机的档位信息和发动机档位信息;
118.所述整车控制器通过所述离合器状态、所述档位信息和所述发动机功能层估算的实际扭矩以及电机功能层估算的实际扭矩,计算传递至混合动力汽车轮端的第一实际扭矩。
119.其中,所述电机控制器确定变速箱输出轴的第二实际扭矩和第二实际扭矩阈值,包括:
120.所述电机控制器获取混合动力汽车的第二参数集,其中所述第二参数集包括第二加速踏板传感器采集第二加速踏板信号;
121.从所述整车控制器获取第一加速踏板传感器采集第一加速踏板信号;
122.基于所述第二参数集和所述第一加速踏板信号,计算所述第二实际扭矩和所述第二实际扭矩阈值。
123.其中,所述电机控制器获取混合动力汽车的第二参数集包括:
124.所述电机控制器通过第二加速踏板传感器采集第二加速踏板信号;
125.所述电机控制器从外部系统接收车速信号;
126.所述电机控制器通过电机轴转速传感器采集电机轴转速;
127.所述电机控制器从发动机控制器接收发动机监控层估算估算的实际扭矩和发动机转速;
128.所述整车控制器通过输入轴转速传感器采集输入轴转速。
129.其中,所述基于所述第二参数集和所述第一加速踏板信号,计算所述第二实际扭矩和所述第二实际扭矩阈值,包括:
130.所述电机控制器通过所述第一加速踏板信号、所述第二加速踏板信号和所述车速信号计算第二实际扭矩阈值;
131.所述电机控制器通过车速信号和电机轴转速估计电机档位信息;
132.所述电机控制器通过输入轴转速和车速信号估计发动机档位信息;
133.所述电机控制器通过发动机转速、输入轴转速和发动机监控层估算的实际扭矩确定离合器状态;
134.所述电机控制器通过电机档位信息、发动机档位信息、发动机监控层估算的实际扭矩、离合器状态和电机监控层估算的实际扭矩,计算传递至混合动力汽车轮端的第二实际扭矩。
135.本实施例方法所述的功能如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算设备可读取存储介质中。基于这样的理解,本发明实施例对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品的形式体现出来,该软件产品存储在一个存储介质中,包括若干指令用以使得一台计算设备(可以是个人计算机,服务器,移动计算设备或者网络设备等)执行本发明各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器(rom,read-only memory)、随机存取存储器(ram,random access memory)、磁碟或者光盘等各种可以存储程序代码的介质。
136.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其它实施例的不同之处,各个实施例之间相同或相似部分互相参见即可。
137.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1