塔筒运输工装及其控制方法、塔筒转运装置与流程
1.本发明涉及风力发电领域,更具体地,涉及一种塔筒运输工装及其控制方法、塔筒转运装置。
背景技术:
2.随着海上风电产业的迅猛发展,风电装机规模的不断扩大,海上风电场施工效率和施工成本控制成为业内关注的焦点。当前海上大直径风力发电机塔筒通常是将整根塔筒分成两段、三段或四段等形式,塔筒与塔筒之间利用法兰通过高强度螺栓连接方式在海上完成吊装拼接。这种分段式塔筒结构需要在筒段两端焊接一对专用的l型法兰以及根据塔筒强度计算配置一圈高强度螺栓,这种分段式的塔筒结构制造成本较高,同时海上吊装和维护成本也在一定程度上制约了海上风电场的施工效率和成本控制,采用整段式的塔筒结构可以降低塔筒的制造成本,大大节省海上的吊装时间和成本,具有很好的前瞻性和实现性。
3.然而,整段式塔筒由于长度很大(例如,在80m以上),在运输车辆进行转运时,筒体的长度导致转弯半径非常大,容易与护栏等各类障碍物发生碰撞,有时一些厂房建筑,如门、护栏等障碍物只能拆除,运输存在各种困难。
技术实现要素:
4.针对现有技术中的存在的上述问题,本发明旨在提供一种用于车载运输塔筒(尤其是整段式塔筒)的多自由度运输工装,使塔筒能够灵活地避障,并改变塔筒整体的重心,抬升安全性。
5.根据本发明的一方面,提供一种塔筒运输工装,用于安装在塔筒转运工具上,所述塔筒运输工装包括:第一支座,用于支撑塔筒的前端部,所述第一支座的底部设置有球铰,以使所述第一支座能够绕所述球铰转动;第二支座,与所述第一支座间隔开设置,用于支撑所述塔筒的中部或后部,所述第二支座上设置有驱动所述第二支座在所述塔筒转运工具上移动的移动驱动装置和驱动所述第二支座升降的升降驱动装置。
6.优选地,所述第一支座可包括第一支撑部和挡板,所述第一支撑部可包括用于接触和支撑所述塔筒的弧形支撑表面,所述挡板位于所述第一支撑部的前端并且在高度方向上延伸超过所述第一支撑部的所述弧形支撑表面。
7.优选地,所述第二支座的底部可设置有滚轮,所述移动驱动装置可驱动所述滚轮旋转以使所述第二支座沿预定方向移动预定距离。
8.优选地,所述第二支座的所述滚轮的下方可设置有以所述第一支座的球铰为圆心并且以所述第一支座和所述第二支座之间的距离为半径的弧形导轨,以引导所述滚轮在所述导轨上运动。
9.优选地,所述第二支座可包括用于支撑和接触所述塔筒的第二支撑部和设置在所述第二支撑部下方的升降部,所述升降驱动装置可驱动所述升降部升降以使所述第二支撑
部升降。
10.优选地,所述塔筒运输工装还可包括控制器和传感器,所述控制器可被配置为从所述传感器接收指示所述塔筒与障碍物之间的位置关系的第一信号,并可基于所述第一信号向所述移动驱动装置输出使所述第二支座产生预定水平位移的第二信号,和/或基于所述第一信号向所述升降驱动装置输出使所述第二支座产生预定竖向位移的第三信号。
11.优选地,所述处理器还可被配置为接收驾驶员输入的指示用于使所述塔筒转动或升降的指令,并基于所述指令控制所述移动驱动装置和所述升降驱动装置操作。
12.根据本发明的另一方面,提供一种塔筒运输工装的控制方法,所述塔筒运输工装用于安装在塔筒转运工具,所述塔筒运输工装可包括支撑塔筒的前端部的第一支座以及与所述第一支座间隔开并支撑所述塔筒的中部或后部的第二支座,当所述塔筒遇到障碍物时,控制所述第二支座移动和/或升降,以使所述塔筒能够以所述第一支座为支点转动和/或升降。
13.优选地,所述塔筒运输工装还可包括用于驱动所述第二支座在所述塔筒转运工具上移动的移动驱动装置、驱动所述第二支座升降的升降驱动装置、用于监测所述塔筒的姿态以及周围环境的传感器,以及控制器,所述控制方法还可包括:基于从所述传感器接收到的指示所述塔筒与所述障碍物之间的位置关系的第一信号,向所述移动驱动装置和/或所述升降驱动装置输出指示执行移动和/或升降操作的第二信号,以使所述塔筒转动和/或升降以避开所述障碍物,或者,所述控制方法还可包括:基于驾驶员输入的指示用于使所述塔筒转动或升降的指令,控制所述移动驱动装置和/或所述升降驱动装置执行移动和/或升降操作。
14.优选地,所述控制方法还可包括:在所述塔筒转运工具转弯时,控制所述第二支座产生横向位移,以使所述塔筒沿与所述塔筒转运工具转弯方向相反的方向相对于所述塔筒转运工具转动。
15.优选地,所述控制方法还可包括:在所述塔筒转运工具转弯时,可控制所述第二支座产生横向位移,以使所述塔筒的纵向轴线相对于所述塔筒转运工具的纵向轴线之间的夹角随着所述塔筒转运工具入弯而逐渐增加,并随着所述塔筒转运工具出弯而逐渐减小,在所述塔筒转运工具达到最大转弯半径时,所述夹角的值最大。
16.优选地,所述控制方法还可包括:在所述塔筒转运工具转弯时,所述控制器可接收来自卫星定位系统的有关道路形状的图像并且从所述传感器接收有关塔筒姿态的图像,所述控制器控制所述第二支座产生横向位移以使所述塔筒的尾端沿着道路中间行进。
17.优选地,所述控制方法还可包括:在所述塔筒转运工具遇到障碍物时,利用所述传感器检测所述障碍物的高度,通过所述控制器计算出使塔筒尾端高于所述障碍物的高度时所述第二支座的对应的升起高度,并将所述升起高度输出到所述第二支座的升降驱动装置。
18.根据本发明的又一方面,提供一种塔筒转运装置,包括塔筒转运工具,所述塔筒转运装置还可包括上述的塔筒运输工装,所述塔筒运输工装可安装在所述塔筒转运工具上,所述第一支座可安装在所述第二支座的前方。
19.通过所述塔筒运输工装,能够实现使其支撑的塔筒能够移动和/或升降,从而能够有效避障,提高塔筒的运输效率。
附图说明
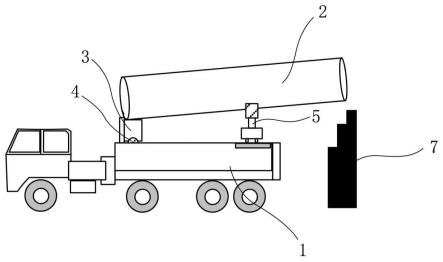
20.图1示出了根据本发明的实施例的塔筒运输装置的示意图;
21.图2示出了根据本发明的实施例的第一支座的示意图;
22.图3示出了根据本发明的实施例的第二支座的示意图;
23.图4示出了根据本发明的实施例的第二支座的第二支撑部的示意图;
24.图5示意性地示出了塔筒避障的示例性示意图;
25.附图标记列表:
26.1-塔筒转运工具;2-塔筒;3-第一支座;4-球铰;5-第二支座;7-障碍物;31-第一支撑部;32-挡板;51-导轨;52-底座;53-升降部;54-滚轮;55-第二支撑部;
具体实施方式
27.为了使本领域技术人员能够更好地理解本发明的技术构思,下面将结合附图对本发明的具体实施例进行详细描述,在附图中,相同的附图标记始终表示相同的部件。
28.为了解决塔筒(尤其是长度较大的整段式塔筒)的运输超限和避障问题,本发明提出了一种塔筒运输工装,如图1所示,本发明提出的塔筒运输工装可以用于安装在塔筒转运工具1(例如,卡车)上,塔筒运输工装包括第一支座3和第二支座5,第一支座3和第二支座5安装在塔筒转运工具1上,第一支座3可与第二支座5间隔开设置并且第一支座3可以安装在第二支座5的前方,换句话说,第一支座3相对于第二支座5更靠近塔筒转运工具1的驾驶舱或车头。
29.第一支座3用于支撑塔筒2的前端部,第二支座5用于支撑塔筒2的中部或后部。塔筒2可以是整段式钢制焊接塔筒,或整段式混凝土塔筒,或塔筒的一个分段,并且沿轴向方向可具有一定的锥度。为了使塔筒2能够灵活避障或改变整体重心,使第一支座3的底部设置球铰4,以使第一支座3能够绕球铰4转动,进而带动塔筒2的前端部能够绕球铰4转动。此外,第二支座5上可设置有驱动第二支座5在塔筒转运工具1上移动的移动驱动装置和驱动第二支座5升降的升降驱动装置,以使第二支座5能够在塔筒转运工具1上移动(例如,左右移动、前后移动或斜向移动等),并且能够使第二支座5升降,从而能够带动塔筒2转动(或摆动)和升降。
30.例如,当塔筒2遇到障碍物7(例如,门、护栏等)时,可使第二支座5执行移动和/或升降操作,并且由于第一支座3底部设置的球铰4的存在,可以使塔筒2能够以第一支座3为支点转动和/或升降。例如,可以使第二支座5横向移动(即,相对于塔筒转运工具1的横向方向或左右方向移动)以使塔筒2摆动或转动从而避开障碍物7,或使第二支座5前后移动以使塔筒尾部抬升从而避开障碍物7,或使第二支座5斜向移动以使塔筒尾部抬升和摆动从而避开障碍物7,或使第二支座5升起一定高度以使塔筒尾部抬升从而避开障碍物7,或同时使第二支座5移动和升起一定高度以使塔筒尾部抬升和摆动从而避开障碍物。
31.因此,本发明提出的包括如上所述的第一支座3和第二支座5的塔筒运输工装是一种多自由度运动系统,能够使塔筒升降和/或转动(或摆动)而灵活地避开或越过障碍物,同时在通过调节第二支座5的运动,还可以改变塔筒2的重心位置,提高安全性。
32.如图2所示,第一支座3包括第一支撑部32和挡板32,第一支撑部32包括用于接触和支撑塔筒2的周向表面的弧形支撑表面,挡板31位于第一支撑部32的前端并且在高度方
向上延伸超过第一支撑部32的弧形支撑表面,以支撑塔筒2的轴向端面。由此,挡板32可以防止塔筒2在尾端抬升时轴向发生位移。球铰4可以设置在第一支撑部32的底部。
33.在此,仅以简化且示意性的方式示出了第一支座3的结构,但第一支座3的形状不限于此,第一支座3可以包括用于固定或捆绑塔筒2以确保塔筒2被可靠固定的其他机构。例如第一支座3可以为夹持结构,以确保塔筒2被可靠固定;例如第一支座3可以为筒型结构,将塔筒端部插入第一支座3以确保塔筒2被可靠固定。当然,第一支座3的类型不限于此,可以是现有技术中已知的实现物体固定的任何合适装置。
34.此外,第二支座5作为一种多自由度动力装置,其可以包括驱动第二支座5移动的移动驱动装置(图中未示出)和驱动第二支座5升降的升降驱动装置(图中未示出)。如图3所示,第二支座5的底部可设置有滚轮54,移动驱动装置可以驱动滚轮54旋转,以使第二支座5沿预定方向(例如,横向方向或左右方向、纵向方向或前后方向、或斜向方向)移动预定距离,进而使塔筒2(例如,塔筒2的尾端)以第一支座3为支点转动(或摆动)或升降。在此,作为示例,移动驱动装置可以是电机、齿轮传动、转向器等组合地实现滚轮54沿预定方向行进的装置,并且移动驱动装置还可以包括制动滚轮54的制动器,以在塔筒2运动到预期位置之后制动,以稳定塔筒2。移动驱动装置的类型不限于此,可以是现有技术中已知的实现物体移动的任何合适装置。
35.在此,优选地,可以控制第二支座5仅能够横向移动,以通过该横向移动控制塔筒2转动或摆动,并且通过稍后将描述的升降驱动装置的升降操作来控制塔筒2抬升或降低。如图3所示,第二支座5的滚轮54的下方可设置有导轨52,以引导滚轮54在导轨上运动,例如,导轨52可以是以第一支座3的球铰4为圆心并且以第一支座3和第二支座5之间的距离为半径的弧形导轨51,从而引导第二支座5以第一支座3为支点做划弧运动,对应地使滚轮54在弧形导轨51上运动。此外,也可以使用其他形式的导轨,例如利用多轨道导轨来引导第二支座的运动。
36.此外,第二支座5还包括用于支撑和接触塔筒2的第二支撑部55和设置在第二支撑部55下方的升降部53,升降驱动装置可驱动升降部53升降以使第二支撑部55升降,进而使塔筒2抬升或降低。如图3所示,该升降部53可以实施为液压缸和活塞杆的形式,升降部53可以设置在底座52(例如,液压底座)上。在此,仅以液压升降的方式示出了升降部53,但升降部53还可以通过其他形式实现,例如,通过气压、电动、机械等方式实现升降的机构。
37.如图4所示,第二支座5的第二支撑部55可以类似于第一支座3的第一支撑部31,其可以具有弧形支撑表面,以接触和支撑塔筒2。在此,第二支座5或第二支撑部55的形状不限于此,第二支座5还可以包括用于固定或捆绑塔筒2以确保塔筒2被可靠固定的其他机构。
38.通过上面描述的包括两个支座(一个支座能够作为枢转支点,一个支座可进行多自由度运动)的塔筒运输工装,在塔筒运输过程中,一方面可以使塔筒(尤其是整段式塔筒)的尾端产生一定行程的上升,在转弯过程中避开障碍物,另一方面,能够使塔筒实现横向转动或摆动,使塔筒避开或远离可能会碰到的障碍物,或确保塔筒尾端尽可能地跟随或贴近道路中线,并且可以控制塔筒和运载车的重心,提升运载的安全性。
39.此外,本发明提出的塔筒运输工装还期望实现自适应控制,以根据塔筒与障碍物之间的位置关系来控制第二支座的运动,从而调节塔筒的姿态,以实现灵活避障的目的。
40.具体地,塔筒运输工装可以包括用于监测和采集塔筒环境参数(例如,塔筒与障碍
物之间的位置关系、障碍物的参数(例如,如图5中示出的高度h和距离d等)、道路的宽度、道路边缘与障碍物之间的位置关系(例如,如图5中的距离l)等)以及监测塔筒姿态(例如,塔筒2的纵向轴线相对于塔筒转运工具1的纵向轴线之间的夹角、塔筒2的纵向轴线相对于道路中线的夹角(如图5中示出的α、β),塔筒2相对于塔筒转运工具1的抬升角度γ等)的传感器(例如,可以是激光探测器)、用于接收传感器的信号并且控制第二支座5的移动驱动装置和升降驱动装置操作的控制器,控制器包括数据放大器、信号处理器、储存器等。
41.在运输塔筒2的过程中,传感器可以实时监测塔筒2与障碍物7之间的位置关系,障碍物7可以是可能影响到塔筒运输的任何物体,例如,门柱、厂房、道路边缘、道路标志牌、树木、山体等等。控制器可以被配置为接收指示塔筒2与障碍物7之间的位置关系的第一信号,并基于第一信号向第二支座5的移动驱动装置输出使第二支座5产生预定水平位移的第二信号,和/或基于第一信号向升降驱动装置输出使第二支座5产生预定竖向位移的第三信号,从而使塔筒2进行转动(或摆动)和/或抬升,以避开障碍物或提前调整塔筒2的姿态以使其能够顺利通过。
42.如图5中的左侧图所示,可以通过传感器检测到塔筒2的左侧筒身距障碍物7较近,可以控制第二支座5产生横向移动,以使塔筒2向右转动或摆动,以使塔筒2尽可能远离障碍物7,如图5中的左下侧图所示。
43.另外,由于塔筒2的长度较长,因此在塔筒转运工具1发生转向时,塔筒2的尾端可能扫向道路边缘、甚至超出道路之外,由此可能被道路之外的树木、墙体、山体等损伤。因此,在塔筒转运工具1转弯时,塔筒尾端可能难以过弯,在这种情况下,可以控制第二支座5产生横向位移,以使塔筒2尽可能地贴近或跟随道路中线,即尽可能地使塔筒2尾端收回到道路中间,避免塔筒2尾端超出道路之外。
44.例如,可以控制第二支座5产生横向位移,以使塔筒2沿与塔筒转运工具1转弯方向相反的方向相对于塔筒转运工具1转动,以使塔筒2相对于道路更加居中,由此确保塔筒2过弯。在这种情况下,塔筒2与塔筒转运工具1之间形成类似“软关节”运动的方式,使塔筒2过弯时不受限与塔筒转运工具1的过弯能力。
45.此外,由于在过弯时,当塔筒转运工具1达到最大转弯半径时,塔筒2相对于道路中线的夹角最大,此刻,塔筒2需要调节的转向角度最大,也就是说,需要使塔筒2的纵向轴线相对于塔筒转运工具1的纵向轴线之间的夹角最大。换句话说,可以使塔筒2的纵向轴线相对于塔筒转运工具1的纵向轴线之间的夹角随着塔筒转运工具1入弯而逐渐增加,并随着塔筒转运工具1出弯而逐渐减小,并在塔筒转运工具1达到最大转弯半径时,该夹角的值达到最大。
46.另外,作为一种选择,在塔筒转运工具1转弯时,控制器可接收来自卫星定位系统的有关道路形状的图像并且从传感器接收有关塔筒姿态的图像,控制器可控制第二支座5产生横向位移以使塔筒2的尾端沿着道路中间行进。由此,借助于卫星定位系统给出的道路的路径图,可以实时地调节塔筒2的姿态,以使其跟随或贴近道路中线,使塔筒2能够顺利通过各种道路。
47.如上具体描述了在如何控制第二支座5产生横向位移以使塔筒2摆动或转动以使塔筒2顺利转弯或避障的描述,下面将描述如何控制塔筒2抬升一定行程以避开在高度空间上可能影响塔筒2运输的方法。
48.如图5中的右侧图所示,可以通过传感器检测到塔筒2的下部或尾端距障碍物7较近,以当前的塔筒高度可能会碰撞障碍物7,因此,可以控制第二支座5产生竖向位移,即升起一定行程,以使塔筒2的尾端抬升至能够顺利通过障碍物7的安全高度。
49.更具体地,在塔筒转运工具1遇到障碍物7时,可以利用传感器检测障碍物7的高度,通过控制器计算出使塔筒尾端高于障碍物7的高度(例如,使塔筒尾端高度障碍物7一定的安全距离d0)时第二支座5的对应的升起高度,并将升起高度输出到第二支座5的升降驱动装置,塔筒2尾端的升起高度与第二支座5的升起高度之间存在特定比例关系,这取决于第二支座5距第一支座3的距离。
50.通过如上所述的方式,使塔筒2能够在遇到障碍物7时,抬升预定高度,以确保能够顺利避开障碍物。
51.此外,可以将塔筒2的转动或摆动与升降相结合,以顺利完成转弯或避障。
52.此外,驾驶员也可以干预或控制调整塔筒2的姿态。例如,控制器还可以被配置为接收驾驶员输入的指示用于使塔筒2转动或升降的指令,并基于指令控制第二支座5的平移驱动装置和所述升降驱动装置操作,以完成驾驶员所指示的操作。例如,驾驶员可以在驾驶过程中实时观察车辆和塔筒周围情况或路况,随时调整塔筒2的姿态。
53.通过如上所述的塔筒运输装置,可以有效地解决塔筒在陆地转运(例如,塔筒厂到码头等场景)时因转弯半径过大而容易与障碍物发生碰撞的问题,通过能够多自由度运动且能够实现自适应控制的塔筒运输装置,可以使塔筒能够实现一定角度的尾端摆动和一定行程的尾端提升,能够有效实现塔筒避障,并且能够改变塔筒整体的重心,使重心前移,提升运输安全性。
54.上面对本发明的具体实施方式进行了详细描述,虽然已表示和描述了一些实施例,但本领域技术人员应该理解,在不脱离由权利要求限定其范围的本发明的原理和精神的情况下,可以对这些实施例进行组合、修改和完善(例如,可以对本发明的不同技术特征进行组合以得到新的技术方案)。这些组合、修改和完善也应在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1