一种具有去除车身阴影功能的检测系统的制作方法
[0001]
本实用新型涉及汽车技术领域,尤其是一种具有去除车身阴影功能的检测系统及其方法。
背景技术:
[0002]
现在越来越多图像识别的技术应用车子安装的摄像头来识别照出的物体(比如人,车,物,标识牌,交通灯),这些应用代替人的眼睛识别主动安全报警,自动驾驶控制等等应用。由于摄像头是装在车身上,车子的外部环境特别复杂,包含各种不同的天气,光照射状况,被识别的图像中存在很多的干扰,有一种就是车自身的阴影。在晴天或者有灯光的时候这种阴影一直存在于摄像头的图像中,并且随着灯光照射的位置不同,变换出各种形状,并且此阴影一直存在,经常被错误的识别成障碍物本身,而造成错误的检测结果。为了去除车子自身阴影的干扰,本实用新型利用车身阴影紧密连通车子的特点。找到阴影轮廓的起点,并且利用轮廓连通性的特别,搜索出阴影轮廓,并且删除阴影轮廓,去除干扰。
技术实现要素:
[0003]
一种具有去除车身阴影功能的检测系统,包括摄像头、控制板和显示屏,所述摄像头安装在车身外侧,所述摄像头与控制板电连接,控制板设有存储器、处理器,所述存储器内存储初始车身外轮廓图像,所述处理器接收摄像头采集的图像并依据车身外轮廓图像去除车身阴影,所述处理器依据去除车身阴影的图像判断是否存在风险并将结果告知用户。
[0004]
进一步地,所述处理器与汽车的控制器连接并控制汽车避开障碍物或制动。
[0005]
进一步地,所述检测系统还包括报警装置。
[0006]
进一步地,所述处理器包括采集模块、比对模块、报警模块、判断模块和驱动模块,
[0007]
所述采集模块采集摄像头的图像信息,并对采集的图像进行二值化处理;
[0008]
所述比对模块比对并找出图像中与车身轮廓相同的部分;
[0009]
所述判断模块判断采集的图像是否存在车身阴影以及当前真实障碍物是否有危险;
[0010]
所述驱动模块与汽车控制器连接并依据图像驱动汽车避开障碍物或制动;
[0011]
所述报警模块在存在危险是启动报警装置进行报警。
[0012]
一种采用上述检测系统去除车身阴影的方法,包括以下步骤:
[0013]
a.处理器对原始视频进行提取轮廓处理
[0014]
b.根据存储器中的车身外轮廓图像确定提取的车身轮廓;
[0015]
c.判断是否存在与车身轮廓相连或者近似的非车身轮廓线,存在是进入步骤d,否则进入步骤e;
[0016]
d.则记录交点的位置,以这个交点为起点0,以此起点0为中点设置一个搜索框,在搜索框里寻找与点0相连的点1,删除点0,然后再以新的点1为新的搜索框中点,在新的搜索框内寻找下一个相连的点2,以此类推,不断搜索,最终将找到阴影轮廓,并且删除;
[0017]
e.依据去除车身阴影的图像判断汽车是否存在风险,当存在风险时控制汽车避开障碍物或制动,并通过报警装置告知用户。
[0018]
采用本实用新型的技术方案,具有以下技术效果:
[0019]
本实用新型剔除车自身阴影,为车载摄像头的图像识别去除了车身阴影这种顽固的干扰,可以提高任何车载摄像头图像识别的检测率。
附图说明
[0020]
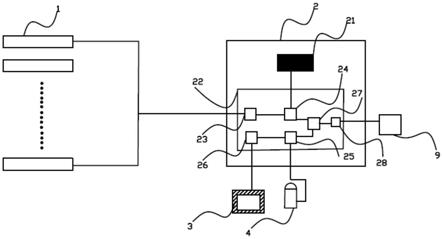
图1为实施例一的结构示意图。
[0021]
图2为摄像头采集的图像示意图。
[0022]
图3为从图2的图像中提取的轮廓图。
[0023]
图4为搜索交点的示意图;
[0024]
图5为实施例一的方法流程图。
[0025]
摄像头1、控制板2、显示屏3、存储器21、处理器22、采集模块23、比对模块 24、报警模块25、显示模块26、判断模块27、驱动模块28、报警装置4、红线 6、搜索框7、汽车控制器9。
具体实施方式
[0026]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0027]
一种具有去除车身阴影功能的检测系统,包括摄像头1、控制板2和显示屏 3,所述摄像头1安装在车身外侧,摄像头1与控制板2电连接,可以理解,在实际过程中,摄像头1可以为多个,当摄像头1安装在车身外侧后,其位置即为固定,因此,当摄像头安装后,虽然受光线等影响,其色彩可能有变化,但是其采集的车身轮廓图像是固定的。控制板2内设有存储器21、处理器22,当摄像头安装后,在存储器21内存储初始车身外轮廓图像,从而为后续图像处理提供标准。处理器2接收摄像头1采集的图像并依据车身外轮廓图像去除车身阴影,然后处理器依据去除车身阴影的图像判断是否存在风险,并在存在风险时控制汽车避开障碍物或者制动。同时可以通过显示屏显示3将存在的风险进行显示,显示屏3设置在驾驶员附近,方便驾驶员查看。
[0028]
处理器21包括采集模块23、比对模块24、报警模块25、显示模块26、判断模块27和驱动模块28,采集模块23采集摄像头1的图像信息,并对采集的图像进行二值化处理;比对模块24比对并找出图像中与车身轮廓相同的部分;判断模块27判断采集的图像是否存在车身阴影以及当前真实障碍物是否有危险;驱动模块28与汽车控制器9连接并依据去除车身阴影的图像驱动汽车避开障碍物或制动,防止发生危险,同时将存在的风险通过显示模块26显示在显示屏3上;报警模块25在存在危险是启动报警装置4进行报警,提醒用户注意。通过现有技术可以有多种方案实现上述功能,在此不做详细论述。
[0029]
由于本实施例最终的图像已经将车身外轮廓去除,因此为车载摄像头的图像识别去除了车身阴影这种顽固的干扰,可以提高任何车载摄像头图像识别的检测率。
[0030]
本实施例获取阴影轮廓的方法如下。
[0031]
首先对原始视频进行提取轮廓处理,在本实施例中,先通过二值化处理,然后提取边界部分,可以理解,现有技术中还存在其他轮廓提取方法,在此不做详细论述。
[0032]
提取完的轮廓如图3所示,图中包含所有物体的轮廓,首先要从所有轮廓中提取属于车本身阴影的轮廓,车身阴影是与车身连接在一起的,跟车身紧密相连的,所以我们可以认为从车身外轮廓连接的有大概率可能是车身阴影,由于摄像头安装在车身上用结构件固定以后,每台车的摄像头安装角度和位置都是一样的,所以我们可以认为,每台车的图像中车身外轮廓位置几乎是一样的。也就是图4里面红线6的位置。有了红线位置,下一步只需要判断有没有跟红线相连或者很近的非车身轮廓线,如果存在,则记录交点的位置,以这个交点为起点 0,以此起点0为中点设置一个搜索框7,框的大小可以自己设定,搜索框越大越耗时间。在搜索框里寻找与点0相连的点1,删除点0,然后再以新的点1 为新的搜索框中点,在新的搜索框内寻找下一个相连的点2,以此类推,不断搜索,最终将找到阴影轮廓,并且删除。
[0033]
f.处理器依据去除车身阴影的图像判断是否存在障碍物,当存在风险时控制汽车避开障碍物或制动,并通过报警装置和显示屏将风险告知用户。
[0034]
由于本实施例最终的图像已经将车身外轮廓去除,因此为车载摄像头的图像识别去除了车身阴影这种顽固的干扰,可以提高任何车载摄像头图像识别的检测率。
[0035]
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1